搜索到
73
篇与
的结果
-
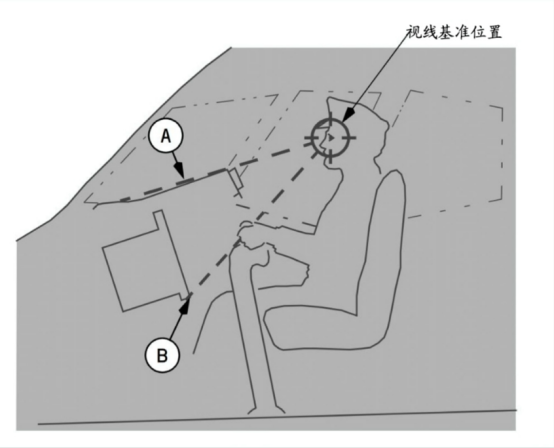
 B737座椅如何调节 提问人:陈景宣人的大脑中有大约860亿个神经元,它们通过突触相互连接,形成复杂的网络。当人学习新知识时,神经元之间连接会变得更强,形成新的“道路”。比如飞行员在反复练习目视拉平着陆动作后,就强化了视觉神经和运动神经的连接,最终一名训练有素的飞行员目视拉平着陆时就形成了“肌肉记忆”。(当然除了视觉,人还有触觉,听觉等神经元来感知信息,但是有超过80%的信息是通过视觉获取的)拉平着陆过程中的信息在短时间内是瞬息万变的,所以需要飞行员快速的获取视觉信息,并且迅速的进行操作动作。这就引入到本文的主题:B737的座椅调节,只有保持正确的坐姿才能第一时间看到外界信息,才能第一时间准确发力去控制飞机。所以操纵飞机的第一步首先调整好座椅位置。 首先来看看手册中正确的坐姿:(1)使用前风挡上方的把手协助进行座椅调节,以获得最佳视线基准位置:调节座椅的高低位置,目光沿着遮光板上表面,可见少量的飞机机头结构(雨刷的根部)。(A);从操纵杆(处于中立位)望去,可以看到前方仪表的最上和最下(外部显示组件的底边(B))。(2)调节座椅的前后位置,使飞行员在不改变身体姿势的情况下,能够全行程控制驾驶盘、油门、脚蹬、刹车、手轮、减速板。(3)使用HUD时,需满足HUD使用要求(如适用)。(4)座椅靠背要求竖直稍向后倾,身体不能悬空、歪斜。我们逐条进行分析,看看不同的坐姿有什么优缺点。先介绍一下(图1)和(图2)都是在接地前6英尺,姿态4度,冻结模拟机以后,调整手机在不同高度拍摄的照片,模拟一下坐姿高低时人眼看到的视景。1、座椅调节过高(图1)优点:座椅调节高,飞行员能够更早更清晰的看到着陆区,(图一红色圈中区域)尤其在低能见情况下更容易看到目视参考,对于经历少的飞行员更容易观察下滑点和下沉,拉平过程中对于道面扑面而来的感觉更明显,会更早的发现下沉快。缺点:1)坐姿高容易控制下沉不均匀,坡度不容易发现。坐姿高的话低头盲区增大,侧视效果不佳。容易视线固着,不利于着陆前的视线转移。着陆不光要控制住下沉,还要控制好方向和位置和姿态,视线转移后才能更好的由“着陆区”转移到“余光面”,更远的视角才更容易发现姿态和方向位置的小量变化。2)坐姿高使飞行员与驾驶盘和方向舵的距离相对增加,操作时需要伸展手臂和腿,也会增加操作难度和反应时间,尤其在紧急情况下影响操作的准确性和及时性。3)坐姿高还有一个潜在威胁就是着陆姿态大,甚至擦机尾风险增加。因为如果保持正确的坐姿,每次起飞姿态达到7-8度时,遮阳板就开始遮挡飞行员的视线,(如下图2姿态4度时遮阳板就开始遮挡视线)飞行员就会保持姿态直到自然离地,长期以往飞行员就形成了7-8度的视觉记忆,在着陆时,即使遇到下沉快、中止着陆或者跳跃的情况下,也会根据视觉记忆保持7-8度姿态不再增加仰角,而如果坐姿高的情况下,7-8姿态不足以遮挡飞行员的视线(图1姿态4度时还能看到大部分跑道),为了控制下沉,飞行员可能还会持续增加姿态,最终导致机尾离地间隙小。2、座椅调节过低(图2)优点:坐姿低更利于视线放远,有利于视线转移,能看出姿态和方向的变化,由于遮阳板的遮挡,也会防止着陆姿态大。(图2红色圈中区域)缺点:1)坐姿低的话驾驶杆可能会遮挡视线观察仪表。2)坐姿低不容易观察目视参考,尤其低能见情况下可能看不到外界目视参考或者看到的参照物太少,都不利于发现偏差。3)坐姿低不利于有效控制下沉,尤其拉平后看不到着陆区迎面而来的刺激,失去了视觉感知而凭借身体或者听语音来控制下沉,判断不精确。常常会误以为下沉不大,开始接地前松杆,容易造成着陆载荷大。3、座椅靠背要求竖直稍向后倾,身体不能悬空,歪斜。座椅靠背太靠前,可能能更好的观察下滑点和目视参考,但是眼睛距离机头或者遮阳板太近,视野可能不能包含整个遮阳板,着陆拉平阶段不利于判断飞机相对于跑道的位置;而且身体靠前,小臂和大臂弯曲角度增加,导致肌肉不能灵活发力,容易控制下沉和方向都不均匀。而且由于看不准,肌肉发力不舒服,所以还经常会出现晃盘或者推拉杆的错误动作。而座椅靠背太靠后,也会由于驾驶盘和遮阳板的遮挡,会出现低头看仪表,抬头找目视参考的错误动作,导致着陆时头部不固定,视线不固定。4、座椅扶手波音B737的座椅扶手可以放下或收起,其重要目的是为了飞行员提供舒适性和支撑。其位置设置可能间接影响飞行员的操作表现和舒适度。座椅扶手收起的优点是方便进出驾驶舱,尤其是在紧急撤离时;手臂活动范围更大,手臂活动更灵活,尤其在风切变等机动飞行时可能需要胳膊更大的活动范围。(B737手册中指出,在安定面失控时,考虑收起内侧的座椅扶手,更容易够到配平手轮。)而座椅扶手放下的优点是:支撑飞行员手臂,缓解疲劳,尤其在长时间的飞行中,包括滑行,爬升、巡航和下降等自动飞行期间。而且座椅扶手放下可以限制新阶段飞行员身体歪斜的问题。5、座椅的前后座椅前后调节需要符合手册要求:(2)调节座椅的前后位置,使飞行员在不改变身体姿势的情况下,能够全行程控制驾驶盘、油门、脚蹬、刹车、手轮、减速板。座椅调节靠前,缺点很明显:比如驾驶员视野变窄,余光能看到的驾驶舱仪表范围变小,不利于监控;座椅靠前还会使手脚束缚,肌肉不能准确及时发力。座椅调节靠后,缺点同样很明显:简单来说就是不能第一时间全行程控制驾驶盘、油门、脚蹬、刹车、手轮、减速板设备。尤其在比较紧急的极端情况时,比如中断起飞,复飞,风切变,大侧风,湿滑跑道控制滑跑方向时。笔者在模拟机教学中,纠正过很多低阶段副驾驶的坐姿,提升了他目测能力和肌肉操纵动作。持续练习下去就会形成正确的肌肉记忆。但是在模拟机上也观察到有些经历时间很长的飞行员并没有保持正确的坐姿,在操作飞机着陆过程中暴露出一些问题。按照拉格德威尔的“一万小时定律”,拉格德威尔认为无论你从事何种活动,只要坚持进行一万小时的专注练习,基本上都可以成为该领域的专家。英国神经学家莱维提通过对人类神经系统的研究证实了这一理论,他指出,为了完全理解和吸收某种知识或技能,人类的脑部确实需要花费上万小时的时间,只有经过这样长时间的努力和学习,才能达到成为大师级水平的状态。虽然有“一万小时定律”,但是如果飞行员一直保持了错误的坐姿,视觉神经和肌肉神经在一个不舒适的范围,那么在着陆拉平阶段面对飞机和自然界瞬息万变的环境,就会出现一个操作的瓶颈,所谓“天花板”的上限被限制了。虽然飞行中忌讳改变飞行方法和坐姿,但是理解了大脑神经元的工作原理,已知错误坐姿的飞行员还是要尝试改正,最终也会符合“一万小时定律”,达到大师级的水平。 综上所述,正确的座椅调节是飞行操纵的一个关键项,正确的、符合人机工程学的坐姿才能保证视觉神经元和运动神经元以最有效的方式工作,才能把平时所学的操作飞机的要领发挥到最佳,尤其对于安全、标准的拉平着陆更有帮助。 以上内容包含个人的经验和见解,由于知识有限,有不对之处希望读者指出! 飞行部飞行六大队 顼明明
B737座椅如何调节 提问人:陈景宣人的大脑中有大约860亿个神经元,它们通过突触相互连接,形成复杂的网络。当人学习新知识时,神经元之间连接会变得更强,形成新的“道路”。比如飞行员在反复练习目视拉平着陆动作后,就强化了视觉神经和运动神经的连接,最终一名训练有素的飞行员目视拉平着陆时就形成了“肌肉记忆”。(当然除了视觉,人还有触觉,听觉等神经元来感知信息,但是有超过80%的信息是通过视觉获取的)拉平着陆过程中的信息在短时间内是瞬息万变的,所以需要飞行员快速的获取视觉信息,并且迅速的进行操作动作。这就引入到本文的主题:B737的座椅调节,只有保持正确的坐姿才能第一时间看到外界信息,才能第一时间准确发力去控制飞机。所以操纵飞机的第一步首先调整好座椅位置。 首先来看看手册中正确的坐姿:(1)使用前风挡上方的把手协助进行座椅调节,以获得最佳视线基准位置:调节座椅的高低位置,目光沿着遮光板上表面,可见少量的飞机机头结构(雨刷的根部)。(A);从操纵杆(处于中立位)望去,可以看到前方仪表的最上和最下(外部显示组件的底边(B))。(2)调节座椅的前后位置,使飞行员在不改变身体姿势的情况下,能够全行程控制驾驶盘、油门、脚蹬、刹车、手轮、减速板。(3)使用HUD时,需满足HUD使用要求(如适用)。(4)座椅靠背要求竖直稍向后倾,身体不能悬空、歪斜。我们逐条进行分析,看看不同的坐姿有什么优缺点。先介绍一下(图1)和(图2)都是在接地前6英尺,姿态4度,冻结模拟机以后,调整手机在不同高度拍摄的照片,模拟一下坐姿高低时人眼看到的视景。1、座椅调节过高(图1)优点:座椅调节高,飞行员能够更早更清晰的看到着陆区,(图一红色圈中区域)尤其在低能见情况下更容易看到目视参考,对于经历少的飞行员更容易观察下滑点和下沉,拉平过程中对于道面扑面而来的感觉更明显,会更早的发现下沉快。缺点:1)坐姿高容易控制下沉不均匀,坡度不容易发现。坐姿高的话低头盲区增大,侧视效果不佳。容易视线固着,不利于着陆前的视线转移。着陆不光要控制住下沉,还要控制好方向和位置和姿态,视线转移后才能更好的由“着陆区”转移到“余光面”,更远的视角才更容易发现姿态和方向位置的小量变化。2)坐姿高使飞行员与驾驶盘和方向舵的距离相对增加,操作时需要伸展手臂和腿,也会增加操作难度和反应时间,尤其在紧急情况下影响操作的准确性和及时性。3)坐姿高还有一个潜在威胁就是着陆姿态大,甚至擦机尾风险增加。因为如果保持正确的坐姿,每次起飞姿态达到7-8度时,遮阳板就开始遮挡飞行员的视线,(如下图2姿态4度时遮阳板就开始遮挡视线)飞行员就会保持姿态直到自然离地,长期以往飞行员就形成了7-8度的视觉记忆,在着陆时,即使遇到下沉快、中止着陆或者跳跃的情况下,也会根据视觉记忆保持7-8度姿态不再增加仰角,而如果坐姿高的情况下,7-8姿态不足以遮挡飞行员的视线(图1姿态4度时还能看到大部分跑道),为了控制下沉,飞行员可能还会持续增加姿态,最终导致机尾离地间隙小。2、座椅调节过低(图2)优点:坐姿低更利于视线放远,有利于视线转移,能看出姿态和方向的变化,由于遮阳板的遮挡,也会防止着陆姿态大。(图2红色圈中区域)缺点:1)坐姿低的话驾驶杆可能会遮挡视线观察仪表。2)坐姿低不容易观察目视参考,尤其低能见情况下可能看不到外界目视参考或者看到的参照物太少,都不利于发现偏差。3)坐姿低不利于有效控制下沉,尤其拉平后看不到着陆区迎面而来的刺激,失去了视觉感知而凭借身体或者听语音来控制下沉,判断不精确。常常会误以为下沉不大,开始接地前松杆,容易造成着陆载荷大。3、座椅靠背要求竖直稍向后倾,身体不能悬空,歪斜。座椅靠背太靠前,可能能更好的观察下滑点和目视参考,但是眼睛距离机头或者遮阳板太近,视野可能不能包含整个遮阳板,着陆拉平阶段不利于判断飞机相对于跑道的位置;而且身体靠前,小臂和大臂弯曲角度增加,导致肌肉不能灵活发力,容易控制下沉和方向都不均匀。而且由于看不准,肌肉发力不舒服,所以还经常会出现晃盘或者推拉杆的错误动作。而座椅靠背太靠后,也会由于驾驶盘和遮阳板的遮挡,会出现低头看仪表,抬头找目视参考的错误动作,导致着陆时头部不固定,视线不固定。4、座椅扶手波音B737的座椅扶手可以放下或收起,其重要目的是为了飞行员提供舒适性和支撑。其位置设置可能间接影响飞行员的操作表现和舒适度。座椅扶手收起的优点是方便进出驾驶舱,尤其是在紧急撤离时;手臂活动范围更大,手臂活动更灵活,尤其在风切变等机动飞行时可能需要胳膊更大的活动范围。(B737手册中指出,在安定面失控时,考虑收起内侧的座椅扶手,更容易够到配平手轮。)而座椅扶手放下的优点是:支撑飞行员手臂,缓解疲劳,尤其在长时间的飞行中,包括滑行,爬升、巡航和下降等自动飞行期间。而且座椅扶手放下可以限制新阶段飞行员身体歪斜的问题。5、座椅的前后座椅前后调节需要符合手册要求:(2)调节座椅的前后位置,使飞行员在不改变身体姿势的情况下,能够全行程控制驾驶盘、油门、脚蹬、刹车、手轮、减速板。座椅调节靠前,缺点很明显:比如驾驶员视野变窄,余光能看到的驾驶舱仪表范围变小,不利于监控;座椅靠前还会使手脚束缚,肌肉不能准确及时发力。座椅调节靠后,缺点同样很明显:简单来说就是不能第一时间全行程控制驾驶盘、油门、脚蹬、刹车、手轮、减速板设备。尤其在比较紧急的极端情况时,比如中断起飞,复飞,风切变,大侧风,湿滑跑道控制滑跑方向时。笔者在模拟机教学中,纠正过很多低阶段副驾驶的坐姿,提升了他目测能力和肌肉操纵动作。持续练习下去就会形成正确的肌肉记忆。但是在模拟机上也观察到有些经历时间很长的飞行员并没有保持正确的坐姿,在操作飞机着陆过程中暴露出一些问题。按照拉格德威尔的“一万小时定律”,拉格德威尔认为无论你从事何种活动,只要坚持进行一万小时的专注练习,基本上都可以成为该领域的专家。英国神经学家莱维提通过对人类神经系统的研究证实了这一理论,他指出,为了完全理解和吸收某种知识或技能,人类的脑部确实需要花费上万小时的时间,只有经过这样长时间的努力和学习,才能达到成为大师级水平的状态。虽然有“一万小时定律”,但是如果飞行员一直保持了错误的坐姿,视觉神经和肌肉神经在一个不舒适的范围,那么在着陆拉平阶段面对飞机和自然界瞬息万变的环境,就会出现一个操作的瓶颈,所谓“天花板”的上限被限制了。虽然飞行中忌讳改变飞行方法和坐姿,但是理解了大脑神经元的工作原理,已知错误坐姿的飞行员还是要尝试改正,最终也会符合“一万小时定律”,达到大师级的水平。 综上所述,正确的座椅调节是飞行操纵的一个关键项,正确的、符合人机工程学的坐姿才能保证视觉神经元和运动神经元以最有效的方式工作,才能把平时所学的操作飞机的要领发挥到最佳,尤其对于安全、标准的拉平着陆更有帮助。 以上内容包含个人的经验和见解,由于知识有限,有不对之处希望读者指出! 飞行部飞行六大队 顼明明 -
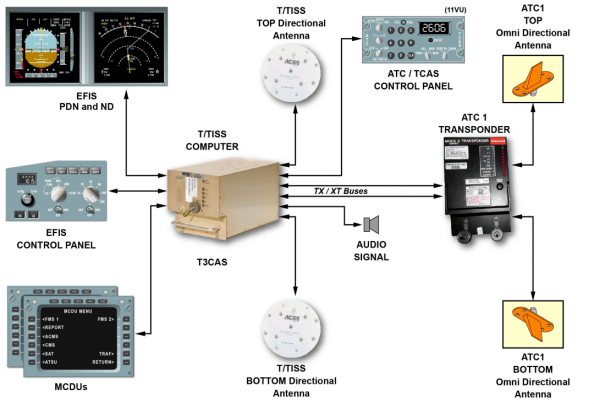
交通预警与防撞系统(TCAS)的技术演进与实践应用 提问人:王梓问题:飞机TCAS的工作原理是什么?一、TCAS的起源与发展TCAS的起源可追溯至20世纪50年代,当时本迪克斯航空电子公司(现隶属于霍尼韦尔公司)的J.S.Morrell博士发表了一篇关于碰撞物理的论文,提出了用于计算接近飞行器间相对速度的计算机算法,为防撞系统的研究奠定了基础。然而,由于技术限制,该论文的应用并未立即普及。直至上世纪六七十年代,随着空中相撞事件频发,相关理论逐渐受到政府关注,并进入实用阶段。最终促使美国国会立法要求实施TCAS的事件是1986年8月31日,在加利福尼亚州靠近洛杉矶国际机场的塞里图斯空域内,一架墨西哥航空的DC-9飞机与一架私人飞机在进近过程中相撞,导致DC-9航班上64人、小型私人飞机上3人全部罹难,并波及地面15人。不久后,本迪克斯航空电子公司获得了FAA对TCAS的首次认证。随后,第一代空中防撞系统(TCAS I)被成功研发。TCAS的作用自那时起得到了认可,并逐渐在全球民航界得到应用和推广。该防撞系统在不同区域有不同的命名,美国航空体系称之为空中交通预警和防撞系统(TCAS:Traffic Alert and Collision Avoidance System),而欧洲航空体系则称之为机载防撞系统(ACAS:Airborne Collision Avoidance System),两者在含义和功能上基本相同。目前,正在研发或使用的TCAS系统有三种类型:TCAS I、TCAS II和TCAS III。TCAS I作为基础系统,主要由TCAS处理器、TCAS天线和一个A/C模式应答机组成,该系统不允许进行横向和纵向偏离,在仪表飞行条件下,飞行机组需将情况通报给空中交通管制员,以协助解决冲突。TCAS II则具备自动协调纵向避撞机动的能力,可根据实际情况自动向有冲突危险的飞机发出爬升或下降指令,飞行员根据指令执行机动,从而避免交通事故的发生。TCAS III则在TCAS II的基础上,增加了横向机动避撞协调方式。本文将基于运用最为广泛的TCAS II进行讨论。二、TCAS的系统组成(一)TCAS计算机一个单通道的TCAS计算机。主要功能是发出询问信号、接收入侵飞机的应答信号、接收本机其他系统的数字和离散信号,基于本机数据和接收的数据进行计算、产生交通咨询和决断咨询。见图1(二)应答机2个S模式的ATC应答机,一个工作,另一个备份。(三)天线装有上下两部天线,天线为四单元相控阵天线,使用四根同轴电缆与处理器相连。用来发射处理器的询问信号,和接收入侵飞机发射产生的应答信号并送到处理器。(四)控制面板驾驶舱的人机接口。主要有TCAS方式选择和应答机编码选择等功能。如图2(五)飞行仪表系统飞行仪表系统,用于显示TCAS系统的目视信息。如图3、图4三、TCAS的工作原理(一)工作原理在二次雷达应答机的应用原理中,通过在飞机上安装询问装置,可以实现飞机间距离间隔的显示,使驾驶员能够了解在特定空域内其他航空器的位置,并采取相应措施以避免碰撞。与二次雷达相似,TCAS系统亦需在飞机上配备应答机以发挥其功能。TCAS系统利用特定无线频率进行飞机间的通信,以确保信息传输的准确性。TCAS的询问器发射脉冲信号,即询问信号(频率为1030MHz),与地面空中交通管制雷达信号类似。当其他飞机的应答器接收到此询问信号时,会发射应答信号(频率为1090MHz)。TCAS的计算机依据发射信号与应答信号之间的时间差来计算距离,并通过方向天线确定方位,向驾驶员提供必要的信息和警告,这些信息将显示在驾驶员的导航信息显示器上。TCAS系统获取附近飞机应答机所发射的数据,并利用这些数据评估潜在的冲突威胁。TCAS系统确定威胁所需数据包括:①入侵飞机相对于本机的方位;②本机与入侵飞机之间的距离,以及相对接近速率或间隔速率;③若入侵飞机通过C模式或S模式应答机报告高度,则包括入侵飞机的相对高度;TCAS系统的触发主要依赖于两个核心因素:CPA(Closest Point of Approach,最近接近点)和TAU(Time to Intercept,拦截时间,即飞机到达CPA的时间)。当两架飞机的CPA距离过近,且TAU时间过短时,TCAS系统将判断存在潜在的碰撞风险。TCAS系统根据所获取的数据计算入侵飞机的航迹,最近的接近点(CPA),以及到达CPA之前的估算时间(TAU)。若TCAS系统检测到某架入侵飞机的航迹可能构成碰撞威胁,它将触发音频和视觉警告信息以及垂直速度指令,以确保足够的航迹间隔和最小的垂直速度变化。如图5(二)冲突飞机探测TCAS把飞机周围的空域根据TAU的阀值进行了相应的划分,按照评估和对可能的相撞威胁进行分类,距离由远及近、威胁由小及大,分为了四个区并以相应的图像显示在ND上。分别为:①其他入侵飞机②接近的入侵飞机③交通咨询 Traffic Advisory(TA)④决断咨询 Resolution Advisory(RA)(三)显示信息白色空心菱形符号:其他入侵飞机,与本机无碰撞危险。白色实心菱形符号:最接近的入侵飞机,与本机接近,但尚无碰撞可能。黄色实心圆形:交通咨询,与本机已相当接近,有碰撞可能,但不须作闪避动作。红色实心方块:决断咨询,两机有碰撞的危险,须立即闪避,空中防撞系统会提供闪避方向的指示。①相对高度: 根据入侵飞机的位置,在符号的上面或下面以100英尺为单位指示。②垂直速度箭头:只有当入侵飞机的垂直速度 ≥ 500英尺/分钟才显示;相对高度和垂直速度箭头与相关入侵飞机符号以相同颜色显示;当一架入侵飞机没有报告其高度,不会显示相对高度和垂直运动。③没有方位的入侵飞机:如果不能获得入侵飞机的TA(交通通告)或RA(决断通告)的方位,在导航显示器下部以数字形式显示距离以及相对高度和垂直速度箭头并根据威胁等级,显示琥珀色或红色。④距离圈:当选择10或20海⾥的距离圈时,显示一个2.5海⾥的白色距离环。根据高度和TAU的不同,TA/RA临界值被划分成如下:(四)TCAS探测范围和能力TCAS的探测范围广泛,覆盖纵向30NM至80NM(取决于飞机构型及外部环境),左右两侧30NM以内,高度范围在+9900ft至-9900ft以内,在侧面和后方的监视距离较小。在探测范围内,TCAS可跟踪45架飞机,根据选定目标的优先级,最多显示30架飞机。(为了减少无线电干扰,管理条例对TCAS的功率有所限制。不同的机型或者TCAS的型号探测范围会有不同。)TCAS II 给予机组提供两种不同的咨询,TA和RA:交通咨询(TA):当TCAS检测到有飞机进入监视包线内,但尚未达到碰撞威胁级别时,会向飞行员发出TA警告,帮助机组建立入侵航空器的目视信息,同时为可能的解决方案做好准备;决断咨询(RA):若TCAS检测到潜在的碰撞威胁,会向飞行员发出RA警告,并提供具体的垂直避让建议,如“爬升”或“下降”,以确保安全距离。RA的发布不是只可以应对单一的威胁,它可以同时应对多个航空器的威胁。四、冲突处置及风险防控交通警告和防撞系统(TCAS)的运用显著降低了空中相撞的风险,然而,由于目前大多数飞机型号的TCAS冲突解决机制要求机组人员依据系统指示进行手动操作,因此并非总是最佳解决方案。由于涉及人为操作,不可避免地会引入机组飞行技术和飞行态度方面的风险。航空史上记录了众多因TCAS警报决策和执行不当导致的不安全事件甚至事故。为了减少人为因素带来的风险,各航空公司遵循中国民用航空局提出的“加强基层建设、打牢基础工作、苦练基本技能”的指导原则,以“敬畏生命、敬畏规章、敬畏职责”为核心,持续提升飞行岗位的核心能力及飞行人员的专业素质,为飞行安全奠定坚实基础。2019年8月,某公司B737-800飞机执行青岛至大阪的航班,管制员指挥机组上目标高度6600米(21700英尺),机组使用高度层改变方式爬升,在21076英尺高度截获。当时在6900米(22600英尺)有其他对向飞机,本机高度截获后在21438英尺,此时上升率1920英尺/分钟触发RA警告“Don’t Climb”,警告产生后2秒机组断开自动驾驶,按RA指令操作减小上升率,飞机最高上升至压力高度21547英尺后又下降至21276英尺,后续警告消失后继续爬升到6600米(22600英尺)。根据两架飞机的目标高度和自动驾驶的工作状态,两架飞机不会相撞,但是TCAS警告的逻辑基于飞机当前的运动轨迹而非目标高度来预测碰撞威胁的,当飞机即将完成爬升,达到其预期的飞行高度层时,TCAS不能预测到飞机即将到达预期的水平面(改平),所以触发了RA警告。(当前TCAS广泛使用的版本为7.1及更高版本,已不再使用“Don’t Climb”或“Don’t Descend”等否定性指令,而是通过更明确的Resolution Advisory(RA)指令指导飞行员采取具体行动,比如 “MORNITOR VERTICAL SPEED”或“LEVEL OFF,LEVEL OFF”)为了规避这种运行风险,管制员和飞行机组都采取了相对应的措施。在航班运行中,我们会经常听到管制员提醒爬升或下降的飞机注意高高度/低高度有相对飞机,从而提醒机组在快要达到目标高度时控制上升率/下降率。作为机组,在爬升或下降时,要注意观察TCAS的显示,在目标高度附近有高度相邻的飞机时,要主动控制上升率或下降率避免危险接近。很多航司为了规避这种运行风险在机组标准操作手册里进行了明确的规定,比如:除非 ATC 有另外的指令,否则当机组察觉到有其他飞机正处于或接近管制指令目标高度的相邻高度时,在爬升或下降至目标高度的最后 1000 英尺垂直范围内,爬升或下降率应不大于 1500 英尺/分钟。针对TCAS的两种不同咨询,机组人员应遵循以下原则对TCAS信息作出响应:当出现TA(Traffic Alert交通警戒)信息时,机组人员应依据TCAS的指示,努力通过目视发现引发TA的航空器,并对其进行监视,确保目视保持安全距离。在未目视发现该航空器之前,不应仅凭TA信息执行机动飞行。当出现RA信息时,驾驶员应立即依照RA的指示操作飞机,除非此操作会直接威胁飞行安全,或者机组人员已明确看到引发RA的航空器。操作驾驶员应根据RA指示的方向和量值,迅速且谨慎地采取正确的操作动作,以满足RA的要求(通常为1500英尺/分的上升率或下降率)。应确保垂直速度指针或俯仰引导标志刚好位于红色区域之外,若显示绿色区域,则应准确地飞至该区域。在首个RA出现时,操作驾驶员应在5秒内作出初始垂直速度响应。对于“增加”或“反向”RA信息,应在2.5秒内作出垂直速度响应。[ 关于TCAS使用的暂行规定[民航飞发〔1998〕188号]] 在正确响应RA信息时,偏离原定高度通常不超过300至500英尺即可解决冲突。实时状态逻辑TCAS警告的逻辑基于飞机当前的轨迹而非目标高度来预测碰撞威胁。当飞机即将完成爬升或下降,即将达到其预期的飞行高度层时,TCAS可能未能预测到飞机即将到达预期的水平面(改平),这仍可能引发RA警告。若另一架飞机在相邻的飞行高度层接近,它可能触发“level off”RA,或“level off”以及相应的“climb”或“descend”RA。这种情况在拥挤的空域中更为常见。在Eurocontrol的研究中[ Eurocontrol ACAS II Annual Safety Report(2014-2015)],“level off”RA占所有观察到的RA的65%。国际民航组织建议机组人员在接近目标飞行高度层时,手动选择较低的垂直速度,以预防触发“level off”RA。(空客公司某些机型已更新升级了TCAS警报预防(TCAP)功能)五、TCAS告警及抑制逻辑(一)TCAS告警(二)TCAS警告抑制逻辑①无线电高度约 1,500 英尺以下,增加下降率决断提示(INCREASE DESCENT RA)被抑制。②无线电高度约 1,100 英尺以下,下降决断提示(DESCEND RA)被抑制。③无线电高度约 1,000 英尺以下,RA 被抑制,仅 TA 方式工作,并且在导航显示(ND)上显示 TA(TA ONLY)。④无线电高度约 500 英尺以下,所有 TCAS 语音信号被抑制。⑤GPWS 和风切变警告抑制所有的 TCAS 报警。六、TCAS的应用及未来的趋势与挑战交通警告和防撞系统(TCAS)在航空安全领域扮演着至关重要的角色。它不仅提升了飞行员对空中交通状况的感知能力,而且增强了飞行的安全性和效率。尤其在复杂和高风险的飞行环境中,例如跨洋航线和复杂空域管理,TCAS的作用已超越了单一的防撞功能,成为优化空中交通的关键工具。国际民航组织(ICAO)对TCAS的安装提出了明确的要求,例如:根据ICAO的规定,所有30座以上的航空器必须在全球范围内安装TCAS II。中国民航局规定,自2004年1月1日起,所有最大审定起飞重量超过5700公斤或批准载客数超过19座的涡轮发动机飞机,必须配备TCAS II。[ 《一般运行和飞行规则》第91.207条(g)款] 美国联邦航空局(FAA)和欧盟航空安全局(EASA)也有类似的规定,要求所有最大审定起飞重量超过15000磅或批准载客数超过19座的涡轮发动机飞机,必须安装TCAS II。[ 《联邦航空条例》121.354和135.152] 此外,随着技术的持续进步,TCAS系统正在逐步整合其他先进的航空电子技术,例如ADS-B(广播式自动相关监视),以提高探测的精确度和可靠性。TCAS作为现代航空安全的关键组成部分,其发展历程从理论探索到广泛应用。通过实时监测和评估周围航空器的位置和速度,预测潜在的碰撞风险,并向飞行员提供及时的警告和避让建议,TCAS显著降低了空中相撞事故的风险。展望未来,TCAS系统将面临新的发展机遇和挑战。一方面,随着航空技术的不断进步和空中交通量的持续增长,TCAS系统有望实现更加智能化的碰撞风险评估和避让建议生成。另一方面,这些发展也带来了新的挑战,例如如何确保系统的兼容性和操作性、如何保护系统的安全性和稳定性等。因此,在未来的发展过程中,需要不断加强技术研发和标准化建设,以推动TCAS系统的持续改进和优化。随着技术的不断进步和应用领域的拓展,我们可以预见TCAS系统将在航空安全领域继续发挥更加重要的作用。参考文献:Boeing next-generation 737,flight crew operations manual。Boeing 737 NG/MAX flight crew training manual。Boeing aircraft maintenance manual(AMM)关于TCAS使用的暂行规定[民航飞发〔1998〕188号]ICAO《附件10》《波音737NG飞机TCAS导航系统及常见故障分析》(掌桥科研,2018年1月1日)出品:培训部
-
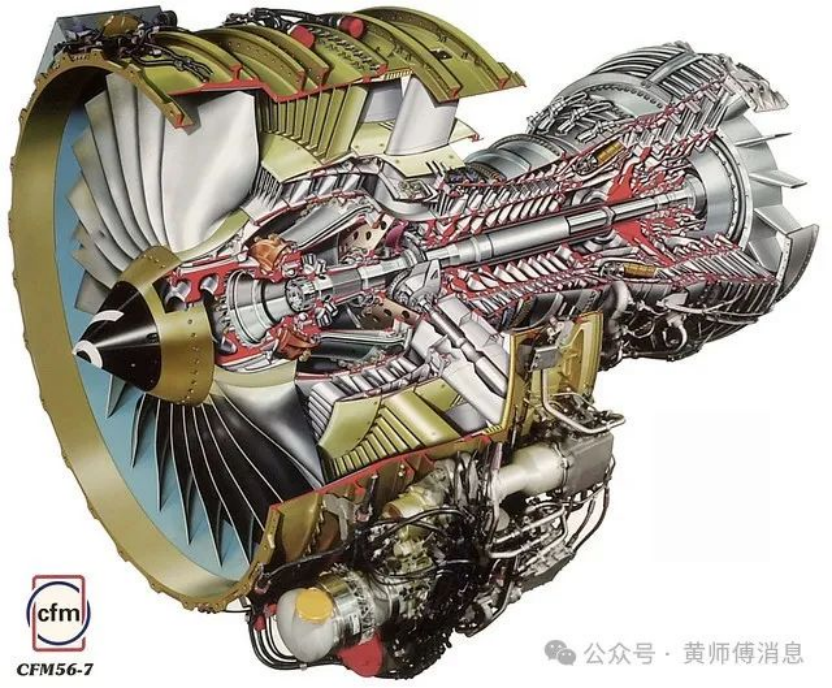
B737发动机非正常起动有哪些故障和现象? 提问人:冯锴B737NG飞机由两台CFM56-7发动机提供动力。发动机是双转子轴流式涡 轮风扇发动机。N1转子由一个风扇、一个低压压气机和一个低压涡轮构成。N2转子包括一个高压压气机和一个高压涡轮。N1和N2转子在机械上是独立的。N2转子驱动发动机齿轮箱。由引气驱动的起动机与 N2转子相连接。起动机工作需要增压空气和电源,来自引气系统的空气驱动起动机。 APU,外部地面气源车或另一台工作中的发动机可以提供引气源。在起动电门在地面(GRD)位时,起动电门使用电瓶电源关闭发动机引气活门并且打开起动活门,利用压缩空气压力转动起动机。发动机起动电门至于GRD位后,有以下现象:(1)EEC通电,全部发动机参数显示(如有交流电)。(2)APU功率提高,管道压力上升。(3)起动活门打开灯亮,N2开始上升。(4)EGT起动725℃红线出现。当起动活门打开时,起动机通过附件齿轮箱传动齿轮系统带动N2压气机旋转。当发动机加速到建议值(25% N2 或最大转速率)时,将发动机起动手柄提至慢车位会打开翼梁燃油活门和发动机燃油关断活门,并使EEC向燃烧室供油并点火。每台发动机都有两个点火电嘴。EEC预位由点火选择电门所选择的点火电嘴。1号发动机左点火电嘴由1#115V交流转换汇流条供电,2号发动机左点火电嘴由2#115V交流转换汇流条供电,2台发动机的右点火电嘴都是由115V交流备用汇流条供电。起始燃油流量指示比实际燃油流量约晚2秒,因此在发动机起动过程中,EGT上升可能出现在燃油流量指示之前。发动机起动原理简图如下:在起动机切断速度(约56% N2),起动电门的保持电磁线圈断电,发动机起动电门回到OFF位,发动机引气活门回到选择的位置,起动活门也关闭。 按照流程节点分起动电门在GRD位和起动手柄提起到IDLE位置来描述发动机起动方面故障。一、起动电门在GRD位置。1起动活门打开灯不亮发动机起动活门是“电控气动”活门。如果“起动活门打开灯”未亮,机组应当首先检查引气管道压力。如果引气压力没有问题,机组应将起动电门回到OFF位,联系地面机务检查。2 没有N2指示起动机的输出轴兼具“剪切保护销”的功能。如果起动机与附件齿轮箱之间的力矩过大,输出轴会由设计的应力集中点剪断。 “起动活门打开灯”亮,说明引气压力已经打开活门。如果N2转速完全不上升,则很可能是离合器故障,或者输出轴剪断所导致的。3 N2达不到要求值N2达不到最小的要求值20% ,通常是由于引气压力不足所导致的,机组应将起动电门回到OFF位联系地面机务检查。 此外,在高温、低气压、高海拔、顺风等条件下,机组通常会待N2高于25%且达到最大冷转后再提起动手柄。这对于减小“起动悬挂”和“热起动”是有一定帮助。4 N1 没有转速一般N2达到20%以上,N1开始有转速指示,如果N1仍然为零,则说明N1转子存在卡阻,需要把起动电门回到OFF,通知地面。二、发动机起动手柄在IDLE位置起动手柄提至IDLE位后,EEC开始控制HMU向燃烧室喷油,同时控制点火电路点火。燃油流量出现后,N1、N2和EGT逐渐上升。起动过程中发动机EEC提供非正常起动保护(只用于地面起动)在地面起动过程中,EEC监测发动机参数以探测即将发生的热起动、发动机失速、超过排气温度起动限制和湿起动。空中起动时,这些保护功能不起作用。1 湿起动原因可能为发动机未点火,EEC具备“湿起动”保护功能,提手柄后15秒如果EGT不上升EEC会关闭燃油计量活门,切断燃油继续进入燃烧室,但飞行员仍需切断起动手柄,这样可以关闭翼梁燃油关断活门,执行冷转程序,吹除燃烧室余油,以避免下次起动富油。执行完中止起动检查单通知机务排故,通知签派。2 起动悬挂EGT上升后,N1和N2不上升或上升缓慢,可能的原因是引气压力不足、顺风起动、燃油流量低。3热起动EEC具备热起动保护功能。当提起起动手柄后如果出现 EGT 快速增高或 EGT 接近起动限制,则是热起动,且 EGT 数字读数周围的白框闪亮。需要注意的是起动电门此时还在GRD位。4起动活门打开起动电门跳回OFF位后,或者是根据检查单人工放到OFF位,如果“起动活门打开灯”仍亮,应执行《起动活门打开检查单》。《起动活门打开检查单》的处置流程,确认起动电门在OFF位后,如果“起动活门打开灯”仍亮,检查单会引导机组切断故障一侧的引气供应。只要供气被切断,起动机的输出轴就会收回,制动离合器与附件齿轮箱也就脱开了。5发动机稳定后无滑油压力指示附件齿轮箱驱动N2转动,同时也在驱动滑油增压泵。滑油增压泵不仅为发动机轴承提供润滑,同时还为起动机提供润滑。正常情况下,N2高于10%前,滑油压力即会上升;N2到达25%前,滑油压力即可高于13PSI,“滑油低压灯”熄灭。FCOM要求“发动机稳定在慢车后无滑油压力指示”应中止起动。如果发动机慢车稳定后,滑油压力出现但未超过13PSI,滑油低压灯仍亮,机组应当考虑执行《发动机滑油压力低检查单》,进而转至《发动机失效关停检查单》关车。6尾喷管着火一般尾喷口起火因为尾喷口有残油导致,发动机火警/过热探测环路不能探测尾喷口的着火,释放发动机灭火剂,也无法扑灭尾喷管失火。尾喷管失火,应当切断油路(关车),利用发动机风转吹除余油和余火。同时应当同时地面灭火设施就位待命。7起动完成后,发动机出现富油然后EGT快速升高是当发动机起动完成后(起动电门回到OFF位置),由于燃油计量活门的失控导致进入燃烧室的燃油很大,N1、N2、EGT快速上升,当发动机起动完成后,机组注意力可能在监控外部、与ATC或者地面维护人员通话,没有再关注发动机仪表,短时间内EGT可能出现超过950度情况,机组发现后需要马上切断发动机起动手柄,然后起动电门放在GRD位进行冷转,但需要特别注意的是起动电门从OFF到GRD位置要在N2小于20%,与前一次放在GRD位置间隔10秒.飞行部十大队 翟志翔
-
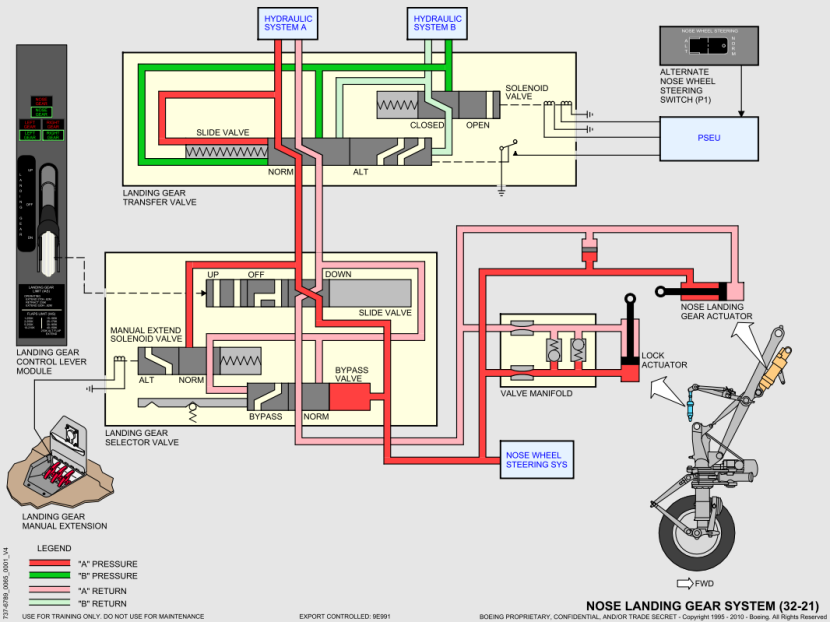
起落架转换活门和起落架选择活门详细工作原理是什么? 提问人:代永超起落架控制系统可以通过液压源的转换与选择,实现起落架的收放、主起落架的减摆、主起落架的收上刹车、前轮转弯、人工放起落架等功能。起落架控制系统中最为关键的两个部件为:起落架转换活门和起落架选择活门。起落架转换活门主要用于实现A、B液压源的切换,起落架选择活门主要用于选择液压的走向。A或B系统液压经过起落架转换活门后,进入起落架选择活门,通过起落架手柄的位置控制起落架选择活门内的滑阀,从而改变液压油路,实现起落架的收、放。前起落架控制:主起落架控制:1.起落架转换活门内部有三个部件:滑阀、电磁活门、位置电门。 正常情况下,起落架控制系统由A系统供压,通过起落架转换活门的转换操作,可以实现由B系统为起落架控制系统供压(备用位)。起落架转换活门有两种转换方式:自动转换、人工转换。无论是自动转换还是人工转换,都是通过PSEU给转换活门内的电磁活门发送控制信号。如下图所示,转换活门位于正常位时,滑阀处于正常位,A液压系统供压,B液压系统被隔离。当PSEU接收到信号,电磁线圈通电线圈活门往左运动,B液压系统压力端驱动滑阀往左运动使其处于备用位,这样B液压系统接入,同时将A液压系统隔离,完成压力源的变换。自动转换:当以下条件均满足时,起落架转换活门自动转换到备用位:飞机在空中起落架控制手柄不在DOWN位一或两个主起落架未收上并锁好左发N2速度小于50%,B系统有压力人工转换:如果飞机在地面且B系统液压油量足够(>21%),通过人工将备用前轮转弯电门置于备用位,可以给PSEU发送一个地信号,从而实现人工转换到备用位。2.起落架选择活门:起落架选择活门内部有三个部件:滑阀、人工放出电磁活门、旁通活门。正常情况下,滑阀位置的变化使液压油路方向发生改变,从而实现了起落架的收、放。起落架控制手柄通过钢索控制选择活门上的控制杆移动,控制杆与滑阀相连接,这样通过控制手柄位置的变化就实现了起落架收、放。人工放出电磁活门在备用位时,液压经过电磁活门后作动旁通活门使其旁通,从而堵住了起落架收上压力,并将起落架收上压力管路连接到回油管。正常收放:当起落架控制手柄在DOWN位时,滑阀移动到DOWN位,起落架放下液压到达起落架收放机构,同时放下液压使旁通活门在正常位。当起落架控制手柄在UP位时,滑阀移动到UP位,液压经过选择活门后与放下液压反向,从而可以反向作动起落架收放作动筒,使起落架收上。当起落架控制手柄在OFF位时,液压无法经过滑阀到达起落架收放机构,致使起落架无法通过液压完成收放。人工放出:如果滑阀卡滞在UP位或OFF位,或者A、B系统发生释压等故障,会造成无法通过液压使起落架放下(不一定是三个起落架都无法放下)。为了保障飞机安全着陆,可以通过人工方式放出起落架。人工放出机构实现两个功能:1、打开盖板,盖板位置电门给人工放出电磁活门一个地信号,使其移动到备用位置,液压到达旁通活门使其处于旁通位,从而切断了起落架收放机构的收上压力。2、拉动人工放出手柄,人工放出连杆机构解锁起落架上位锁机构,使起落架靠自身重力和气动载荷放下并锁定。飞行部五大队 于庆林
-
发动机点火系统故障分析 问题:发动机点火系统故障的现象有哪些?提问人:毕冬冬业内在航班运行中出现发动机起动不成功的事例有很多,极易造成延误。导致飞机发动机起动不成功的原因按系统分类,主要有四个系统:起动系统、点火系统、燃油系统和发动机控制系统。本文针对B737NG飞机右发起动时右点火不成功故障,对点火系统故障进行总结分析,并给出排故思路和过站快速判断处理办法。 事例分析:某航司飞机推出后右发起动时右点火不成功,机务为了更好判断故障,让机组尝试用左点火起动,起动成功,后续将飞机拖回,按MEL保留右发右点火,执行M项放行飞机。一、点火系统简述点火系统的主要部件有:点火选择电门、点火激励器、点火导线和点火电嘴。起动手柄、起动电门、点火选择电门和EEC共同控制点火。每台发动机都有两个点火电嘴。EEC 预位由点火选择电门所选择的点火电嘴。1发左点火电嘴由1#115V交流转换汇流条供电,2发左点火电嘴由2#115V交流转换汇流条供电。2台发动机的右点火电嘴都是由115V交流备用汇流条供电。自动重新点火为了防止熄火,发动机具备自动再点火能力。EEC 一旦探测到发动机熄火,两个点火器工作。当出现 N2 非指令性快速减小或 N2 小于慢车转速时,即探测到熄火。起动原理图如下: EEC接收起动手柄、起动电门,点火选择电门及CDS/DEU信号,提供电源给点火激励器,点火激励器将115V交流电转换成15000-20000V的直流电 ,通过点火导线供给点火电嘴,点火电嘴点燃燃油喷嘴出口的燃油。起动发动机时,一般N2转速达25%时开始提起动手柄供油点火。提起动手柄至慢车位时,点火控制系统实现以下控制: 115V转换汇流条、115V备用汇流条的交流电源分别通过两个闭合的点火电门(由起动手柄控制)送至EEC。EEC根据驾驶舱内的起动电门位置、点火选择电门位置来控制在EEC内部的四个点火ON/OFF电门,四个点火ON/OFF电门控制115V交流电115伏交流电被送至左、右点火激励器。 在地面使用单点火起动发动机的情况下,由于每次发动机运转时,仅一个EEC通道在工作,而每个EEC通道只控制一个点火ON/OFF电门的闭合或断开,以将转换汇流条或备用汇流条的115伏交流电送至左或右点火激励器。故每次提起动手柄时,只有一个点火ON/OFF电门闭合,从而实现单点火系统工作。下图为EEC工作在A通道时选择左点火的原理图。同理,当双点火系统工作时,工作的EEC通道控制相应的两个点火ON/OFF电门的闭合,从而实现双点火工作,下图EEC工作在A通道时选择双点火的原理图。二、起动电门不同位置的点火方式地面位(GRD):当起动电门放到地面位时,启动机工作带动发动机转动。当启动手柄放到慢车位时开始供油点火。 关断位(OFF):当起动电门关断位时,通常情况下点火不工作。但是 EEC 探测到可能存在发动机熄火时会自动打开点火系统。 连续位(CONT):机组在下列情况下将电门放到连续位:起飞、进近、着陆、恶劣天气。当电门在此位置时,打开相应的电嘴连续工作 飞行位(FLT):当启动电门飞行位时,左右点火电嘴同时工作。EEC不使用点火选择电门的位置信息。三、发动机点火自动控制 如果出现下列情况之一,EEC打开发动机的双点火系统进行点火: ●发动机起动手柄在慢车位置,起动开关在FLT位; ●发动机起动手柄在慢车位置,起动开关在GRD或CONT位,飞机在空中,N2小于慢车; ●发动机起动手柄在慢车位,发动机非指令减速或N2小于57%,但大于50%,此时两个点火系统接通30秒。 如果出现下列情况之一,EEC自动关断点火: ●发动机起动电门不在需要点火的位置 ●地面热起动 ●地面湿起动 ●发动机起动手柄在慢车位,飞机在地面,发动机完成起动,N2减小到50%,且EGT大于起动限制 ●由于N2小于慢车或N2非指令减小而使点火系统接通,当发动机速度恢复正常时四、放行风险分析发动机点火系统的保留按是否进行延程飞行分类,两种保留的区别仅在于机组执行的O项,由于正常航班为非延程飞行,所以一般情况下,我们都按照非延程飞行进行保留: 1.发动机左点火失效(对于非延程飞行),依据MEL74-00-01-01B放行,除延程飞行外,可以不工作,只要:a. 点火选择电门保持在BOTH 位;b. 相关发动机右点火系统工作正常。 2.发动机右点火失效(对于非延程飞行),依据MEL74-00-01-02B放行,除延程飞行外,可以不工作,有M项:需要将相关发动机左点火器通过可接受的构型与交流备用汇流条相连接,且如果点火故障是由于一个EEC 右点火故障造成的,则不允许放行飞机。五、故障总结点火系统故障并不难,但是一旦出现点火系统故障,大概率会导致航班延误。为了减少点火系统故障的发生以及高效处理故障减少航班延误,有以下建议和注意事项:典型点火不成功故障现象为:起动机能够带动发动机转动到满足启动发动机的转速要求或最大冷转速度,机组提起燃油手柄时,转速和EGT不上升。当发生发动机起动不成功时,可以通过告知机务N2转速和EGT数据来共同确定是否为点火故障。确认为点火故障后,切勿着急拖回飞机,根据机务建议尝试使用另一侧点火起动以便于判断故障办理保留或停场排故,并及时将故障告知AOC以便于后续航班调整,减少航班延误。同时注意:第一次起动失效后,再次起动时要完成冷转吹除发动机燃烧室内余油,防止下一次起动富油导致起动异常。 飞行部三大队 石磊