搜索到
73
篇与
的结果
-
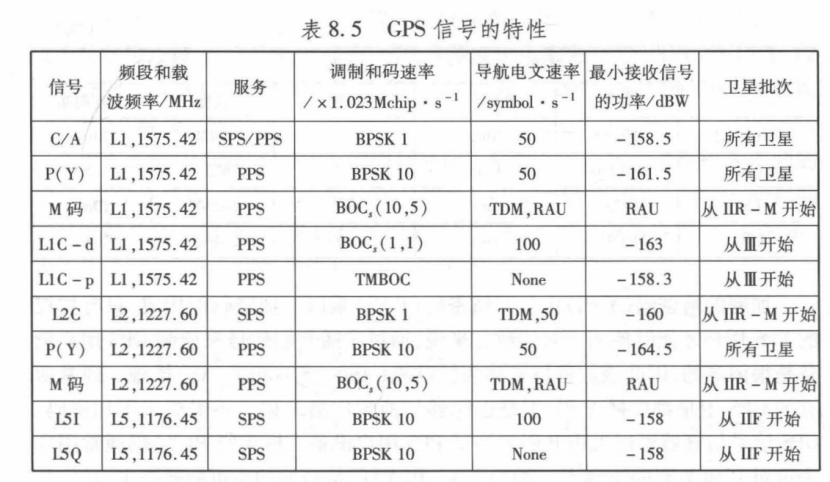
 为什么GPS欺骗可以诱骗B737飞机改变航径 提问人:曹泽宇近年来,GPS欺骗已经成为多个国际区域多发的航空事件因素。2024年3月,土耳其航空飞往贝鲁特的航班由于GPS欺骗无法在贝鲁特机场降落,只能在机场上空盘旋40分钟后返回土耳其。自2023年8月下旬起,多架飞机在飞越伊拉克-伊朗边境空域时,导航系统被虚假GPS信号欺骗,导致飞机偏离航线,其中一架商务机差点误入伊朗领空。民航局《关于GPS信号受干扰的风险警示》(2025年第1期)中提到,蓄意干扰GPS信号的方式包括阻断(Jamming)和欺骗(Spoofing)两种情况。信号阻断通常是指发射与导航系统信号相同或相近频率的射频信号,对正常的GPS信号进行压制阻断干扰,导致GPS接收机无法正常工作。信号欺骗通常是指发射伪造的卫星导航系统信号或者延时转发真实卫星导航系统信号以误导飞机GPS接收机,使其计算出错误的定位、导航和授时数据,进而影响与之交联的其他机载系统或功能。GPS信号阻断对飞行的影响与机载GPS设备故障或丢失GPS信号对飞行造成的效果类似,即GPS提供的定位、导航和授时信息出现暂时或不可恢复的失效或性能下降。与GPS信号阻断相比,GPS信号欺骗造成的影响更加隐蔽,部分情况可能无告警信息,飞行机组难以觉察和识别,风险高,应当给予充分重视。本文的讨论基于波音737系列飞机。一、GPS简介及接收机工作原理(一)GPS简介NAVSTAR GPS最初由美国政府研制,用作军用导航系统。GPS由GPS指挥部控制,在国防部(department of defense, DoD)资助下进行运作。第一颗可运行的原型卫星于1978年发射,1993年末宣称具备初步运行能力(initial operational capability, IOC),1994年末具备了完全运行能力(full operational capability, FOC)。GPS为导航用户提供两类服务:一种称为标准定位服务(standard positioning service, SPS)的公开或民用服务,和一种称为精密定位服务(precise positioning service, PPS)的受限或军用服务。SPS的定位精度为在95%概率上达到15~25米。由于美国的安全问题,美国国防部故意对民间用户降低定位精度,使其为100米。SPS对所有具有合适设备的用户提供定位服务,而PPS仅仅对美国政府授权的用户提供定位服务,包括美国和NATO军队及他们的供货商,PPS信号为加密信号。PPS的定位精度在95%概率上为小于18米。GPS导航信号包含10种不同的信号,通过三个频段广播,这三个频段分别为L1 (link 1)、L2(link 2)和L5(link 5)。由于C/A码和精密(加密的精密)(precise (encrypted precise), P (Y))码信号在GPS现代化项目之前已经存在,因此将它们称为传统的GPS信号。其他的信号作为GPS现代化的一部分并没有被所有的卫星广播。加密的精密码(Y码)由公开精密码(P码)乘以一加密码而构成,只有授权的PPS用户才能够使用。对于敌方来说,通过广播复制信号来欺骗GPS用户设备是很困难的,因此该加密技术称为抗欺骗(Anti-Spoofing, AS)措施。由表8.5可知,被所有卫星广播、提供SPS服务的,仅限于C/A码。而C/A码是公开码,无法对抗欺骗。目前我公司机队使用的GPS接收机为Collins公司的GLU系列和Honeywell公司的RMA系列,均为使用C/A码的民用产品。(二)GPS接收机工作原理GPS接收机的工作基于测距原理,即通过测量接收机与卫星之间的距离来确定位置。接收机内部通常存储有卫星在轨道上的位置数据,并利用无线电信号实现距离测量。无线电信号以光速传播,接收机通过测量信号从卫星发送到接收机的时间,结合已知的卫星位置,可以计算出接收机与卫星之间的距离。具体实现中,接收机会生成与卫星发送的信号一致的本地信号,通过比较两者的时间差(△t),得出卫星信号到达接收机所花费的时间。为了保证测量的准确性,每颗卫星上都配备了高精度的原子钟,用以保持一致的时间精度。而接收机内部的时钟则并非原子钟,因而存在一定的时间误差。这种误差被定义为接收机时间与GPS时间之间的差值,记为△tBIAS。由于△tBIAS是未知的,接收机需要通过计算来确定这一偏差值。为了同时确定飞机的位置(包括纬度、经度和高度)以及时间偏差△tBIAS,接收机必须满足以下条件:1.需要至少4颗卫星的位置数据;2.同时测量接收机与这4颗卫星之间的距离;3.利用4个距离方程计算4个未知数,即: (1)纬度(2)经度(3)高度(4)时间偏差△tBIAS通过这种方式,接收机能够精确计算飞机的三维位置和时间偏差,从而实现定位功能。二、GPS接收机关于水平性能的监控指标以及RAIM功能(一)水平性能监控指标GPS接收机中有三个水平指标:水平精度扩散因子(HDOP)、水平品质指标(HFOM)和水平完好性限度(HIL)。1.水平精度扩散因子(HDOP)定义:HDOP(Horizontal Dilution of Precision)是描述GPS定位精度的一个指标,用于量化由卫星几何分布引起的水平定位误差。它反映了接收机计算水平位置(经度和纬度)时因卫星位置分布而导致的误差放大程度。计算方法:HDOP是通过卫星几何分布的数学模型计算出来的,具体由卫星与接收机之间的几何关系决定。其计算基于GPS导航方程的协方差矩阵,公式如下:首先,根据GPS导航方程,建立几何矩阵 G(由卫星位置和接收机位置组成)。计算协方差矩阵: 其中,Q 是协方差矩阵。从协方差矩阵中提取水平精度扩散因子: 其中,和 分别是协方差矩阵中对应水平位置(x 和 y 坐标)的分量。影响因素:卫星的几何分布:卫星分布越均匀,HDOP 越小,定位精度越高;分布越集中,HDOP 越大,定位精度越差。一般情况下,HDOP 值越小表示定位水平精度越高。水平品质指标(HFOM)定义:HFOM(Horizontal Figure of Merit)是计算出的水平定位误差的定量指标,用于反映接收机在水平位置上的定位精度,通常以米(m)为单位。它考虑了接收机的测量误差以及卫星的几何分布。计算方法:HFOM 的计算公式为:HFOM=HDOP×UERE其中:HDOP 是水平精度扩散因子;UERE(User Equivalent Range Error)是用户等效测距误差,表示由卫星信号传播误差(如多路径效应、大气延迟、接收机噪声等)引起的测距误差,通常以米为单位。影响因素:卫星几何分布:HDOP 越小,HFOM 越小;测距误差:UERE 越小,HFOM 也越小。HFOM 直接反映了接收机的水平定位精度,值越小表明定位越精确。水平完好性限度(HIL)定义:HIL(Horizontal Integrity Limit)是水平完好性监测的限值,表示在给定的概率和警告时间内,接收机能够保证的最大水平误差。它是导航系统用来判断是否满足运行要求的重要参数。计算方法:HIL 的计算涉及到完好性监测算法,主要基于以下公式:HIL=K×HFOM其中:K 是一个与完好性要求相关的扩展因子,具体值由系统完好性要求决定;HFOM 是水平品质指标。影响因素:完好性要求:系统要求的完好性概率(如 10^-7 的误差概率)会影响 K 的选择;接收机的定位精度:HFOM 越小,HIL 越小。HIL 通常用于飞行导航系统中,以确保接收机在水平定位上的最大误差不会超过运行需求。总结与关系HDOP 是基础指标,反映卫星几何分布对定位精度的影响;HFOM 在 HDOP 的基础上进一步结合测距误差,得出实际的定位精度;HIL 则基于 HFOM,加入完好性要求,提供系统可接受的最大误差范围。(三)RAIM功能GPS接收机具有接收机自治式完好性监测(RAIM)功能。RAIM对卫星的工作状态进近监测,即监测GPS接收机用以计算数据的那些卫星状态。为了实现RAIM功能,GPS接收机需要从至少5颗卫星接收到有效的伪距测量值(理想情况下更多)。这是因为要计算出一个三维位置和时间校正,至少需要4颗卫星的数据;而额外的一颗卫星提供的数据则用于冗余检查,以便进行错误检测。RAIM功能的输出是对GPS位置误差的估值。自治完好性监测值送给FMC,FMC利用此自治完好性监测数据决定GPS数据是否能用于导航。三、GPS欺骗的两种方式(一)伪造信号攻击者可以伪造GPS信号,即在与合法GPS信号相同频率下并以高于合法GPS信号功率的强度传输信号。卫星模拟器能够同时广播来自十颗卫星的携带伪造导航数据的信号。伪造信号也可以通过操控和重新广播实际信号(即诱射)生成。只要受害接收器对伪造信号保持锁定,受害接收器的位置信息就会受到攻击者的控制或影响。(二)转发信号攻击者在一处接收合法的GNSS信号,然后将这些信号中继到另一处,在不进行任何修改的情况下重新传输它们。这样,如果使用了加密技术,对手就可以避免被检测到,同时它可以“呈现”给受害者在受害者位置通常不可见的GNSS信号。四、GPS接收机的水平指标以及RAIM功能是否能有效检测GPS欺骗三个水平指标(HDOP、HFOM和HIL)在一定程度上可以间接反映GPS信号的某些异常,但它们本质上是基于已接收到的信号计算得出的,无法直接检测或防御GPS信号欺骗。因此,它们无法单独应对GPS信号欺骗,但可以作为辅助工具,结合其他防御机制来提高检测和应对能力。(一)HDOP(水平精度扩散因子)作用:反映卫星几何分布对定位精度的影响。如果卫星的几何分布突然变得异常(如集中在一侧),HDOP值可能会显著增大。局限:在GPS信号欺骗场景中,攻击者可能伪造多个“虚假卫星”,这些伪造信号可能模拟出良好的几何分布,从而维持较低的HDOP值。即使HDOP值看似正常,也无法说明接收到的信号是否真实。(二)HFOM(水平品质指标)作用:结合HDOP和测距误差(UERE)来量化水平定位误差。如果信号质量下降(如噪声增大),HFOM值会升高。局限:GPS欺骗攻击通常伪造高质量的信号,使得HFOM值看起来正常甚至较低。因此,HFOM对伪造信号的检测能力有限。(三)HIL(水平完好性限度)作用:反映在完好性监测中接收机可接受的最大水平误差。在欺骗攻击中,如果攻击信号设计得当,HIL值可能不会触发警告。局限:HIL的计算依赖于HFOM和完好性要求。如果伪造信号模拟了高精度的导航环境,HIL值可能不会超出预期范围,从而无法识别伪造信号。(四)RAIM功能波音737的GPS接收机支持基础的RAIM功能,RAIM功能通过一系列步骤确保信号的完整性,首先利用冗余校验依赖至少五颗卫星的几何分布并通过残差分析检测信号异常,同时进行一致性检验以检查卫星信号间的伪距、多普勒频移等参数是否自洽,在检测到异常时,RAIM可能排除故障卫星。然而,高精度欺骗依然可以绕过RAIM,方法包括:1.同步多卫星欺骗策略,即生成多个虚假卫星信号并模拟合理的卫星几何分布来避免触发告警;2.动态渐进偏移方法,如缓慢调整位置参数和与惯性导航系统数据同步来实现欺骗而不被发现;3.针对RAIM算法阈值的优化,通过控制残差范围以及利用接收机时钟偏差掩盖欺骗信号的不一致性;4.混合真实与欺骗信号的方式,比如部分信号替换和逐步增强欺骗信号功率来降低被检测的风险。这些策略,可以有效地规避基于RAIM的信号完整性检测机制。五、FMC的位置更新机制如果GPS数据有效,FMCS可以在地面上使用GPS数据来更新FMC位置。在空中,FMC使用从GPS数据和ADIRU的输入计算的位置来修正其基于ADIRU的惯性水平位置。这是FMC位置并且是以经纬度来计算的。如果数据是有效的,FMC将使用其本侧的来自多模式接收机的GPS输入。如果本侧的数据无效,则使用对侧的GPS数据。如果欺骗信号绕过GPS接收机的水平指标检测以及RAIM功能,则数据被认为有效。根据FMC的位置更新机制,FMC位置将被欺骗信号诱骗。六、结论GPS欺骗对飞机导航系统构成了严重威胁,其隐蔽性强,难以被飞行机组觉察和识别。尽管GPS接收机的水平性能监控指标和RAIM功能在一定程度上可以间接反映GPS信号的异常,但它们无法单独应对GPS信号欺骗。因此,需要结合其他防御机制来提高检测和应对能力,以保障飞行安全。培训部飞行培训中心 刘刚
为什么GPS欺骗可以诱骗B737飞机改变航径 提问人:曹泽宇近年来,GPS欺骗已经成为多个国际区域多发的航空事件因素。2024年3月,土耳其航空飞往贝鲁特的航班由于GPS欺骗无法在贝鲁特机场降落,只能在机场上空盘旋40分钟后返回土耳其。自2023年8月下旬起,多架飞机在飞越伊拉克-伊朗边境空域时,导航系统被虚假GPS信号欺骗,导致飞机偏离航线,其中一架商务机差点误入伊朗领空。民航局《关于GPS信号受干扰的风险警示》(2025年第1期)中提到,蓄意干扰GPS信号的方式包括阻断(Jamming)和欺骗(Spoofing)两种情况。信号阻断通常是指发射与导航系统信号相同或相近频率的射频信号,对正常的GPS信号进行压制阻断干扰,导致GPS接收机无法正常工作。信号欺骗通常是指发射伪造的卫星导航系统信号或者延时转发真实卫星导航系统信号以误导飞机GPS接收机,使其计算出错误的定位、导航和授时数据,进而影响与之交联的其他机载系统或功能。GPS信号阻断对飞行的影响与机载GPS设备故障或丢失GPS信号对飞行造成的效果类似,即GPS提供的定位、导航和授时信息出现暂时或不可恢复的失效或性能下降。与GPS信号阻断相比,GPS信号欺骗造成的影响更加隐蔽,部分情况可能无告警信息,飞行机组难以觉察和识别,风险高,应当给予充分重视。本文的讨论基于波音737系列飞机。一、GPS简介及接收机工作原理(一)GPS简介NAVSTAR GPS最初由美国政府研制,用作军用导航系统。GPS由GPS指挥部控制,在国防部(department of defense, DoD)资助下进行运作。第一颗可运行的原型卫星于1978年发射,1993年末宣称具备初步运行能力(initial operational capability, IOC),1994年末具备了完全运行能力(full operational capability, FOC)。GPS为导航用户提供两类服务:一种称为标准定位服务(standard positioning service, SPS)的公开或民用服务,和一种称为精密定位服务(precise positioning service, PPS)的受限或军用服务。SPS的定位精度为在95%概率上达到15~25米。由于美国的安全问题,美国国防部故意对民间用户降低定位精度,使其为100米。SPS对所有具有合适设备的用户提供定位服务,而PPS仅仅对美国政府授权的用户提供定位服务,包括美国和NATO军队及他们的供货商,PPS信号为加密信号。PPS的定位精度在95%概率上为小于18米。GPS导航信号包含10种不同的信号,通过三个频段广播,这三个频段分别为L1 (link 1)、L2(link 2)和L5(link 5)。由于C/A码和精密(加密的精密)(precise (encrypted precise), P (Y))码信号在GPS现代化项目之前已经存在,因此将它们称为传统的GPS信号。其他的信号作为GPS现代化的一部分并没有被所有的卫星广播。加密的精密码(Y码)由公开精密码(P码)乘以一加密码而构成,只有授权的PPS用户才能够使用。对于敌方来说,通过广播复制信号来欺骗GPS用户设备是很困难的,因此该加密技术称为抗欺骗(Anti-Spoofing, AS)措施。由表8.5可知,被所有卫星广播、提供SPS服务的,仅限于C/A码。而C/A码是公开码,无法对抗欺骗。目前我公司机队使用的GPS接收机为Collins公司的GLU系列和Honeywell公司的RMA系列,均为使用C/A码的民用产品。(二)GPS接收机工作原理GPS接收机的工作基于测距原理,即通过测量接收机与卫星之间的距离来确定位置。接收机内部通常存储有卫星在轨道上的位置数据,并利用无线电信号实现距离测量。无线电信号以光速传播,接收机通过测量信号从卫星发送到接收机的时间,结合已知的卫星位置,可以计算出接收机与卫星之间的距离。具体实现中,接收机会生成与卫星发送的信号一致的本地信号,通过比较两者的时间差(△t),得出卫星信号到达接收机所花费的时间。为了保证测量的准确性,每颗卫星上都配备了高精度的原子钟,用以保持一致的时间精度。而接收机内部的时钟则并非原子钟,因而存在一定的时间误差。这种误差被定义为接收机时间与GPS时间之间的差值,记为△tBIAS。由于△tBIAS是未知的,接收机需要通过计算来确定这一偏差值。为了同时确定飞机的位置(包括纬度、经度和高度)以及时间偏差△tBIAS,接收机必须满足以下条件:1.需要至少4颗卫星的位置数据;2.同时测量接收机与这4颗卫星之间的距离;3.利用4个距离方程计算4个未知数,即: (1)纬度(2)经度(3)高度(4)时间偏差△tBIAS通过这种方式,接收机能够精确计算飞机的三维位置和时间偏差,从而实现定位功能。二、GPS接收机关于水平性能的监控指标以及RAIM功能(一)水平性能监控指标GPS接收机中有三个水平指标:水平精度扩散因子(HDOP)、水平品质指标(HFOM)和水平完好性限度(HIL)。1.水平精度扩散因子(HDOP)定义:HDOP(Horizontal Dilution of Precision)是描述GPS定位精度的一个指标,用于量化由卫星几何分布引起的水平定位误差。它反映了接收机计算水平位置(经度和纬度)时因卫星位置分布而导致的误差放大程度。计算方法:HDOP是通过卫星几何分布的数学模型计算出来的,具体由卫星与接收机之间的几何关系决定。其计算基于GPS导航方程的协方差矩阵,公式如下:首先,根据GPS导航方程,建立几何矩阵 G(由卫星位置和接收机位置组成)。计算协方差矩阵: 其中,Q 是协方差矩阵。从协方差矩阵中提取水平精度扩散因子: 其中,和 分别是协方差矩阵中对应水平位置(x 和 y 坐标)的分量。影响因素:卫星的几何分布:卫星分布越均匀,HDOP 越小,定位精度越高;分布越集中,HDOP 越大,定位精度越差。一般情况下,HDOP 值越小表示定位水平精度越高。水平品质指标(HFOM)定义:HFOM(Horizontal Figure of Merit)是计算出的水平定位误差的定量指标,用于反映接收机在水平位置上的定位精度,通常以米(m)为单位。它考虑了接收机的测量误差以及卫星的几何分布。计算方法:HFOM 的计算公式为:HFOM=HDOP×UERE其中:HDOP 是水平精度扩散因子;UERE(User Equivalent Range Error)是用户等效测距误差,表示由卫星信号传播误差(如多路径效应、大气延迟、接收机噪声等)引起的测距误差,通常以米为单位。影响因素:卫星几何分布:HDOP 越小,HFOM 越小;测距误差:UERE 越小,HFOM 也越小。HFOM 直接反映了接收机的水平定位精度,值越小表明定位越精确。水平完好性限度(HIL)定义:HIL(Horizontal Integrity Limit)是水平完好性监测的限值,表示在给定的概率和警告时间内,接收机能够保证的最大水平误差。它是导航系统用来判断是否满足运行要求的重要参数。计算方法:HIL 的计算涉及到完好性监测算法,主要基于以下公式:HIL=K×HFOM其中:K 是一个与完好性要求相关的扩展因子,具体值由系统完好性要求决定;HFOM 是水平品质指标。影响因素:完好性要求:系统要求的完好性概率(如 10^-7 的误差概率)会影响 K 的选择;接收机的定位精度:HFOM 越小,HIL 越小。HIL 通常用于飞行导航系统中,以确保接收机在水平定位上的最大误差不会超过运行需求。总结与关系HDOP 是基础指标,反映卫星几何分布对定位精度的影响;HFOM 在 HDOP 的基础上进一步结合测距误差,得出实际的定位精度;HIL 则基于 HFOM,加入完好性要求,提供系统可接受的最大误差范围。(三)RAIM功能GPS接收机具有接收机自治式完好性监测(RAIM)功能。RAIM对卫星的工作状态进近监测,即监测GPS接收机用以计算数据的那些卫星状态。为了实现RAIM功能,GPS接收机需要从至少5颗卫星接收到有效的伪距测量值(理想情况下更多)。这是因为要计算出一个三维位置和时间校正,至少需要4颗卫星的数据;而额外的一颗卫星提供的数据则用于冗余检查,以便进行错误检测。RAIM功能的输出是对GPS位置误差的估值。自治完好性监测值送给FMC,FMC利用此自治完好性监测数据决定GPS数据是否能用于导航。三、GPS欺骗的两种方式(一)伪造信号攻击者可以伪造GPS信号,即在与合法GPS信号相同频率下并以高于合法GPS信号功率的强度传输信号。卫星模拟器能够同时广播来自十颗卫星的携带伪造导航数据的信号。伪造信号也可以通过操控和重新广播实际信号(即诱射)生成。只要受害接收器对伪造信号保持锁定,受害接收器的位置信息就会受到攻击者的控制或影响。(二)转发信号攻击者在一处接收合法的GNSS信号,然后将这些信号中继到另一处,在不进行任何修改的情况下重新传输它们。这样,如果使用了加密技术,对手就可以避免被检测到,同时它可以“呈现”给受害者在受害者位置通常不可见的GNSS信号。四、GPS接收机的水平指标以及RAIM功能是否能有效检测GPS欺骗三个水平指标(HDOP、HFOM和HIL)在一定程度上可以间接反映GPS信号的某些异常,但它们本质上是基于已接收到的信号计算得出的,无法直接检测或防御GPS信号欺骗。因此,它们无法单独应对GPS信号欺骗,但可以作为辅助工具,结合其他防御机制来提高检测和应对能力。(一)HDOP(水平精度扩散因子)作用:反映卫星几何分布对定位精度的影响。如果卫星的几何分布突然变得异常(如集中在一侧),HDOP值可能会显著增大。局限:在GPS信号欺骗场景中,攻击者可能伪造多个“虚假卫星”,这些伪造信号可能模拟出良好的几何分布,从而维持较低的HDOP值。即使HDOP值看似正常,也无法说明接收到的信号是否真实。(二)HFOM(水平品质指标)作用:结合HDOP和测距误差(UERE)来量化水平定位误差。如果信号质量下降(如噪声增大),HFOM值会升高。局限:GPS欺骗攻击通常伪造高质量的信号,使得HFOM值看起来正常甚至较低。因此,HFOM对伪造信号的检测能力有限。(三)HIL(水平完好性限度)作用:反映在完好性监测中接收机可接受的最大水平误差。在欺骗攻击中,如果攻击信号设计得当,HIL值可能不会触发警告。局限:HIL的计算依赖于HFOM和完好性要求。如果伪造信号模拟了高精度的导航环境,HIL值可能不会超出预期范围,从而无法识别伪造信号。(四)RAIM功能波音737的GPS接收机支持基础的RAIM功能,RAIM功能通过一系列步骤确保信号的完整性,首先利用冗余校验依赖至少五颗卫星的几何分布并通过残差分析检测信号异常,同时进行一致性检验以检查卫星信号间的伪距、多普勒频移等参数是否自洽,在检测到异常时,RAIM可能排除故障卫星。然而,高精度欺骗依然可以绕过RAIM,方法包括:1.同步多卫星欺骗策略,即生成多个虚假卫星信号并模拟合理的卫星几何分布来避免触发告警;2.动态渐进偏移方法,如缓慢调整位置参数和与惯性导航系统数据同步来实现欺骗而不被发现;3.针对RAIM算法阈值的优化,通过控制残差范围以及利用接收机时钟偏差掩盖欺骗信号的不一致性;4.混合真实与欺骗信号的方式,比如部分信号替换和逐步增强欺骗信号功率来降低被检测的风险。这些策略,可以有效地规避基于RAIM的信号完整性检测机制。五、FMC的位置更新机制如果GPS数据有效,FMCS可以在地面上使用GPS数据来更新FMC位置。在空中,FMC使用从GPS数据和ADIRU的输入计算的位置来修正其基于ADIRU的惯性水平位置。这是FMC位置并且是以经纬度来计算的。如果数据是有效的,FMC将使用其本侧的来自多模式接收机的GPS输入。如果本侧的数据无效,则使用对侧的GPS数据。如果欺骗信号绕过GPS接收机的水平指标检测以及RAIM功能,则数据被认为有效。根据FMC的位置更新机制,FMC位置将被欺骗信号诱骗。六、结论GPS欺骗对飞机导航系统构成了严重威胁,其隐蔽性强,难以被飞行机组觉察和识别。尽管GPS接收机的水平性能监控指标和RAIM功能在一定程度上可以间接反映GPS信号的异常,但它们无法单独应对GPS信号欺骗。因此,需要结合其他防御机制来提高检测和应对能力,以保障飞行安全。培训部飞行培训中心 刘刚 -
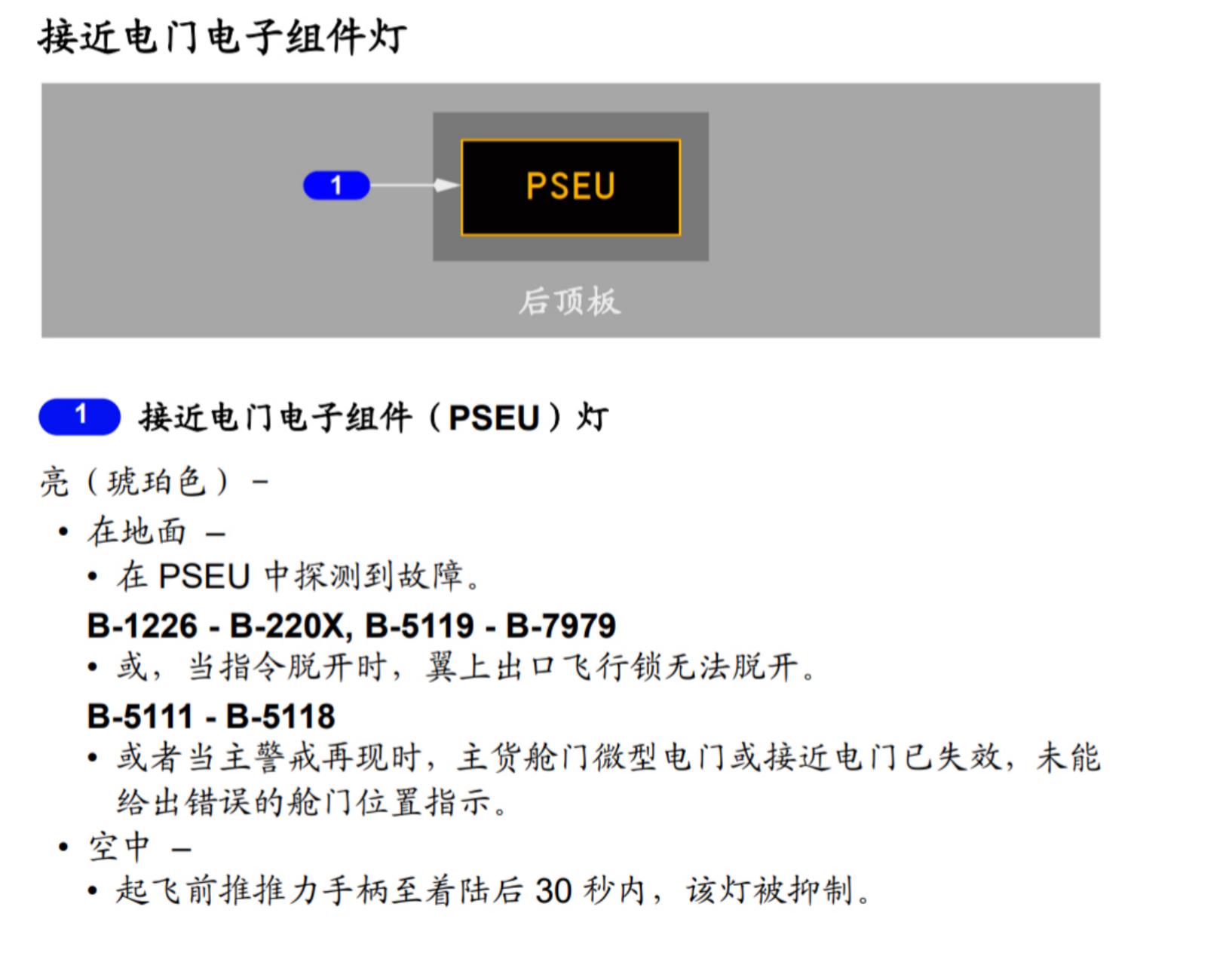
PSEU故障介绍及处置 提问人:丁子阳一、故障介绍FCOM针对接近电门电子组件指示灯(后续简称PSEU灯)作如下描述:PSEU灯点亮的含义和逻辑 : 1、PSEU处理从空/地传感器来的信号,并将空/地信号作为参数发送到飞机的其它系统以备使用。2、PSEU监控以下系统并在必要时提供警告:① 起飞形态警告②着陆形态警告③起落架④空/地传感⑤舱门警告⑥减速板伸出警告等我们来看一下英文原文的描述:根据英文描述,应理解为:PSEU探测到某个故障(而非PSEU本身故障)。PSEU逻辑图也能很好的反映这点:故障的类型可以分为内部和外部两种,也就是说,手册中(包括FCOM、MEL、QRH等)所谓的PSEU故障应理解为:PSEU探测到内部或外部故障:关于PSEU灯点亮还有一条描述为“发出指令时翼上应急出口飞行锁无法断开”,虽然单独列出,但是实际上,飞行锁无法根据PSEU发出的指令正常断开,本身可以被视作一种特殊的外部故障——外部输入探测故障:二、快速检查单:PSEU故障检查单QRH:Proximity Switch Electronic Component Fault当PSEU灯点亮时,机组需执行相应检查单:解释:按压主警告牌,若PSEU灯熄灭,说明是“可放行故障”。若PSEU灯无法熄灭,由于无法通过按压主警告牌判断故障是否能够放行,因此需要执行步骤二进一步证实:解释:通过双发关车或设置停留刹车,如果不能熄灭PSEU灯,则说明是“不可放行故障”。如果PSEU灯能够通过双发关车或设置停留刹车熄灭,则说明是“可放行故障”。三、最低设备清单:PSEU故障MEL:Proximity Switch Electronic Component Fault如上图所示,由“PSEU故障——每次放行前进行PSEU的故障检查”可知,此附带维修程序(M)的放行依据主要是给地面放行人员使用的。当放行人员发现头顶板PSEU灯点亮后,他们需按照上图所示步骤接近PSEU控制盒(位于电子设备舱)并操作程序自检,以自检结果作为是否能够放行的依据。同理可知,由“PSEU故障——PSEU灯可以熄灭”可知此项放行依据偏向于飞行机组使用。比如,当双发启动好,或者飞机滑出之后,机组发现PSEU灯点亮,按照QRH进行处置并成功熄灭PSEU灯之后,联系地面机务告知故障状况。大家可以想象以下几种场景:场景一:机组尚未进场,地面放行人员对飞机进行检查的时候发现PSEU灯亮,于是他心里头浮现出两个问题:1、这架飞机到底还能不能放行?2、到底是什么问题导致PSEU灯亮?如果是比较严重的问题(不可放行),还涉及到如何安排接下来的排故工作。因此,该放行人员根据MEL要求来到电子设备舱,通过PSEU自检功能调取故障代码来确认:场景二:与场景A相同的情况,这次是一个比较有经验的放行人员,当他发现PSEU灯亮时,他并没有第一时间去电子设备舱,而是学着飞行机组的操作,通过按压复位电门发现能够熄灭PSEU灯,因此判断为可放行故障。基于以上判断,若时间允许,该放行人员才会开电子设备舱去查询故障代码,根据故障代码放行:若时间紧张,则该放行人员会直接根据以下MEL放行:场景三:在飞行前准备过程中,机组确认飞机无MEL项。滑行过程中,机组发现PSEU灯亮,立即报告塔台,同时查找QRH找到了相应内容,通过主警戒按压复位,发现未能熄灭PSEU灯,然后设置停留刹车,发现能够熄灭PSEU灯。于是,机组联系地面告知具体情况,经过简单的沟通,且有MEL放行依据,因此获悉能够继续执行本次航班。本次放行依据如下:从以上三个场景可以看出,两个MEL放行依据,一个带M程序,一个不带M程序,看似矛盾,归根结底是给不同的对象使用的:当放行人员负责时,并不看故障灯是否能够熄灭,而是偏向于以PSEU自检之后的故障代码作为放行依据的。当然,在时间紧张的情况下,放行人员也被允许使用不带M程序的放行依据(后续还需补充M程序);当飞行机组负责时(比如飞机已滑出),仅以故障灯复位作为放行的依据(尽管并不直接参考MEL,但是所执行的QRH本质上就是验证是否符合MEL)。这两个放行依据本质上是等效的,也即是说:如果是可放行的故障,那么在驾驶舱内或者PSEU自检都是可以复位PSEU灯的。反之同理。1、当新构型PSEU灯点亮时,根据手册描述,当故障是可放行的时候,机组通过双发关断或者设置停留刹车都可以熄灭故障灯,也就是说,双发关断和设置停留刹车是或的关系,这一点我们也可以通过详细的逻辑图得知:如图所示,停留刹车信号和双发关断信号共同接入一个或非门。也即是说,当你按照QRH执行第二步时,你发现设置停留刹车无法熄灭PSEU故障灯,那么,你就无需再抱着侥幸的心态尝试通过关车来熄灭故障灯已达到放行条件了。2、还有一个与PSEU相关的放行依据截图如下:仅当能够确认PSEU灯本身发生故障时进行此项,以进一步通过PSEU自检功能确认是否有故障、故障是否允许放行。四、常见PSEU灯亮原因汇总(1)起落架近位传感器。近位传感器给PSEU提供信号作为PSEU判断空地逻辑的依据。(2)无线电高度表故障;由于无线电高度表设计缺陷,经常导致PSEU灯亮,一般还伴随飞行指引消失或RA故障旗,夏季雨季居多,多数通过更换天线或收发机解决,重点需要对天线做好密封。(3)地面扰流板内锁活门信息;可能原因为地面扰流板内锁活门钢索,或地面扰流板内锁活门近位传感器S1050。(4)翼上应急门飞行锁;因应急门锁的位置电门接触不良,会使PSEU内的系统1和系统2所接收的信号不一致。(5)襟翼位置电门S138故障;曾经有S138在空中因污染而短路,发出襟翼为25度的虚假信息,而错误产生着陆警告。(6)地面扰流板压力电门故障。(7)速度刹车(扰流板)手柄电门S651故障,该电门也会导致起飞警告响。(8)PSEU内部故障:一般为PSEU本身或相关电路及接地故障。(9)翼上应急门位置电门故障。(10)安定面配平电门不一致;由于某些原因导致成对电门提供信号不一致超过1.5秒时就会触发PSEU内部“水平安定面不一致故障”信息,产生故障代码31-52004并点亮PSEU灯和MASTER CAUTION灯。当飞机在地面出现PSEU灯亮故障时,建议机组按照以下步骤执行“一个安定面配平循环操作”后再判断是否可继续执行航班:从绿区开始向UP方向配平直到超过绿区然后向DOWN方向配平超出绿区,然后回到绿区中间位置。此时:A.如果PSEU灯灭,则飞机可以继续执行航班。B.如果PSEU灯仍亮,则说明有其它故障存在,需要进一步判断故障并按照相关MEL条款放行飞机或按照FIM手册相关章节进行排故。(11)发动机未运转信息:一般为相关跳开关跳出或继电器R564故障。(12)自动油门电门组件故障。(13)起落架手柄:如果PSEU探测到起落架手柄位置信号存在异常,会触发PSEU灯亮,有运营商曾反映,起落架伸出后,三个红灯和绿灯同时亮,有时再重新收放一次起落架后恢复正常,研究发现,起落架控制系统的后扇形盘以及钢索等机械结构存在一定问题,导致放下起落架后,起落架手柄内部的S1电门没有被作动,从而触发起落架指示问题。(14)主暗/亮灯光测试组件M1456内C5和C6过热损坏,会造成PSEU灯的电压波动与指令不一致也会导致PSEU灯亮。(15)还有一种很普遍的现象:飞机落地后在旅客下客期间,因为此时可能也在卸货,因此前起落架减震会翘起来点,导致前起落架空/地传感器判断飞机不在地面进而触发PSEU指示灯亮。由于飞行机组无法判断是真故障还是假故障,因此还是需要报地面机务来确认情况。五、机组处置流程SOP 中对于在发动机起动前的处置程序如下:1) 查阅 MEL/CDL,并与机务人员沟通确认符合放行标准; 2) 确认机务人员按照 MEL 执行了维护程序 M 项(如有); 3) 确保完成 MEL/DDG 的操作程序 O 项(如有)。SOP 中对于在发动机起动过程中直至起飞前出现设备失效的处置程序如下:飞行机组执行 QRH(冗余故障不需要执行检查单)后,还应查阅 MEL/CDL。若 MEL 中明确指出不能放行或可以放行但还有 M 项,应滑回停机位。如果 MEL/DDG 中不含 M 项但含有 O 项,机组应完成相应的工作或步骤,并在 TLB 中完成对故障描述的填写后,在维护措施栏中填写“机组按照 MEL/DDG XX 故障 O 项执行”,机组无需滑回检查。因PSEU故障中断起飞后,机组及时报告塔台,申请脱离跑道,脱离跑道后执行 QRH、查阅 MEL,联系 AOC,经机组与 AOC 综合 评估后决定是否滑回做进一步检查。飞行部二大队 蔡顺利
-
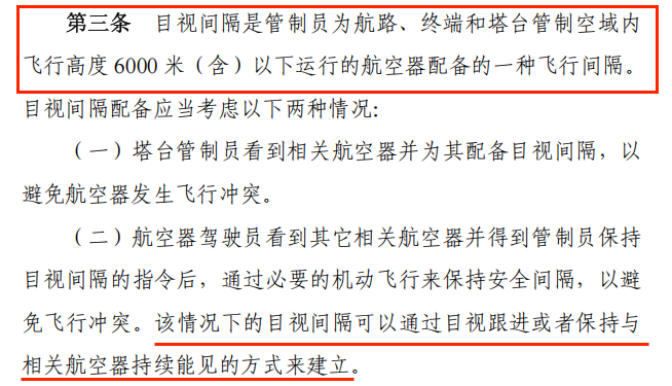
如何理解目视进近实施中的保持目视间隔含义? 提问人:郭鹏目前首都机场和大兴机场已经实施了目视进近。依据民航局《关于在全国运输机场推广目视进近工作的通知》(局发明电〔2024〕2530号)和《推进民航华东地区运输机场目视进近工作方案》(华东局发明电〔2024〕1488号)要求,青岛胶东机场和上海浦东机场将于2025年1月1日至2025年3月31日进行第一阶段目视进近运行试点验证工作,同时基于华东辖区机场目视进近实施规划,千万级(含)以上运输机场将全面实施目视进近运行。要理解目视间隔,需先了解法规中关于目视间隔的定义、目的及实施方法:下图为民航空发〔2008〕1号《目视间隔和进近实施暂行规定》下图为民航空发〔2008〕173号 《目视间隔和进近实施指导材料》下图为民航空发〔2008〕1号《目视间隔和进近实施暂行规定》下图为CCAR-93TM-R6 《民用航空空中交通管理规则》当机组接受目视间隔时,驾驶员需自行保持与前方航空器的间隔,以避免尾流影响。尾流是飞机机翼升力的副产物,从起飞离地到降落的整个过程中都会产生。尾流涡旋从飞机后方看是向外、向上,并环绕在翼尖周围。大型飞机测试表明,两侧涡旋保持略小于翼展的间隔,且尾流会随风漂移。进入前机尾流区时,后机会因多种因素(如进入方向、前机重量和外形、后机大小、前后机距离、遭遇高度等)出现机身抖动、下沉、飞行状态急剧改变、发动机停车甚至飞机翻转等现象。例如,后机从后方进入前机一侧尾流中心时,一个机翼遇到上升气流,另一个机翼遇到下沉气流,飞机会因承受较大滚转力矩而急剧滚转。小型飞机尾随大型飞机起飞或着陆时,若进入前机尾流,处置不当可能引发飞行事故。如何规避尾流风险?下图为CCAR-93TM-R6 《民用航空空中交通管理规则》 规避尾流的关键在于保持目视间隔。根据CCAR-93TM-R6《民用航空空中交通管理规则》,我公司运行的B737系列机型均为中型机,需重点关注后机为中型机时的尾流间隔。虽然法规显示中型机之间无尾流间隔影响,但为确保安全着陆,仍需控制间隔,为前机提供足够时间脱离跑道,为后机创造干净安全的跑道环境。数据来源根据数据样本,进场航空器占用跑道时间基本集中在1分钟左右,但受多种因素(如飞机性能、跑道条件、气象条件、飞行员操作等)影响,部分航空器占用跑道时间可能超过60秒。首都机场细则也规定,目视进近航空器从飞越跑道入口至完全脱离跑道应不超过60秒,否则驾驶员需提前通知管制员。复飞时机的建议若前机未脱离跑道,复飞的最低时机是什么时候?下图为CCAR-93TM-R6 《民用航空空中交通管理规则》根据CCAR-93TM-R6《民用航空空中交通管理规则》,B737机型属于3类(非单发螺旋桨航空器)。首都机场细则规定,在仪表进近程序的最后进近阶段使用目视间隔时,航空器驾驶员应保持目视判断与其他相关航空器的安全间隔。当航空器进近至决断高度时,可能会遇到前机正在脱离跑道或即将离地的情况。此时,驾驶员可根据需要随时复飞并通报管制员。为降低低高度复飞的风险,公司建议,连续进近时,若后机高度低于60米/200英尺,而前机仍未脱离跑道,应执行复飞。如何确定目视间隔?下图为民航空发〔2008〕173号 《目视间隔和进近实施指导材料》在实际应用中,仅依靠目视观察难以准确判断前机的高度和距离。因此,需结合机载监控设备(如TCAS系统)和目视扫视来观察航空器。下图信息来自AMM-34-45-00TCAS通过发射和接收信号获取其他飞机的高度、距离和方位数据,并在ND页面上显示。然而,TCAS显示可能受设备故障、电磁干扰、数据融合误差等因素影响,导致信息偏差。例如,机组曾反映TCAS显示目标位置与实际不符,原因可能是TCAS计算机内部计算错误或天线方向性变差。因此,飞行员需将目视观察与TCAS显示信息进行对比验证,确认其准确性。借助TCAS获得高度和距离信息后,可结合时间换空间的方法确定间隔。主流民用航空器的下降率约为800英尺/分钟,加上200英尺的前机脱离决断高度,刚好形成1000英尺的高度差。按照3%的下滑剖面,对应的高距离比约为3海里。因此,当前机为中型机时,后机应至少保持3海里的间隔(与CCAR-98TM-R1中的雷达间隔不小于5.6千米相呼应)。除此之外,还应考虑前后机的速度差(B737进近速度大于大部分中型机)及前机因意外导致的占用跑道时间延长等情况,从而留出一定的余度。在进场繁忙的机场和时段,机组应尽力配合管制,若因间隔问题无法控制速度,应及时通报管制员。实际运行中,也可能出现前机未脱离但塔台已给出着陆指令的情况。此时,机组需合理评估前机能否及时脱离,并据此决策是否继续进近或复飞。PM也应在这种情况下第一时间提示PF前机是否脱离,以增强机组的情景意识,辅助机长决策。如何规避目视进近的相关风险?1、熟悉程序与环境:机组在实施目视进近前,需充分熟悉目视进近程序,明确周边地形和障碍物位置,对进近中如何使用自动设备、规划进近计划、参考地图指示和仪表进近指示、在什么位置达到什么样的高度、形态、速度等做好充分准备。2、严格标准喊话与分工协作:机组需严格遵守标准喊话,合理分工,充分利用观察员的作用,相互提醒,强化稳定进近意识,避免程序错漏忘。3、保持安全间隔:跟随前机时,机组应保持与前机的安全间隔,避免尾流影响。4、明确复飞程序:机组需明确复飞程序,做好预案。若尾流间隔不满足要求、失去目视参照物、前序航空器未脱离跑道、航空器故障或无法持续目视着陆跑道、前序航空器或不能执行目视进近时,应及时切换仪表进近或执行复飞,并通报管制员。建议最晚在200英尺高度作为复飞或继续进近的决策点。飞行部十二大队 徐伟
-
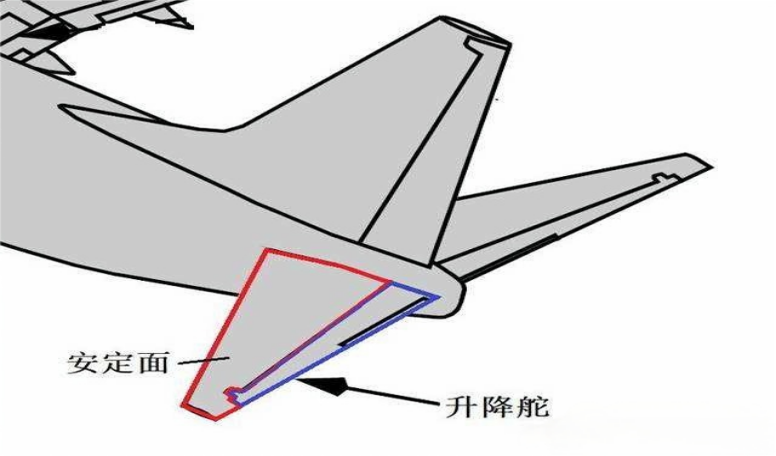
为什么QRH要求“安定面配平不工作”计划使用襟翼15着陆,而“安定面失控”没有要求? 提问者:薄一凡QRH中关于安定面问题有以下三个检查单:《安定面失控》《安定面失去配平》《安定面配平不工作》,首先我们先了解下什么是安定面配平?1,安定面上图中红色区域为水平安定面,蓝色区域为升降舵。升降舵是主要飞行操纵系统,水平安定面是配平系统。水平安定面的面积一般是升降舵的3倍左右,可见其作用力之大。所以对起飞阶段很重要的一条就是将水平安定面调整到和重心位置相适应的位置。2,安定面控制:安定面可以通过以下三种方式来控制①驾驶盘上的任一安定面配平电门;(主电动安定面配平)②自动驾驶配平;③人工配平;(人工转动安定面配平轮)下图是水平安定面控制原理图3、安定面的工作逻辑:①在人工驾驶时,每个驾驶盘上的安定面配平电门通过主电动安定面配平电路操纵电动配平马达。配平马达将机械转动输入齿轮箱。齿轮箱将转动传递给丝杠和后钢索鼓。丝杠驱动安定面改变角度,后钢索鼓带动配平手轮转动。②自动驾驶仪接通时,通过自动驾驶仪安定面配平电路完成安定面配平。自动驾驶由FCC控制通过同一个配平马达将机械转动输入齿轮箱,进而改变安定面角度。③人工配平时,配平手轮通过钢索机构将机械转动输入齿轮箱,进而带动丝杠转动改变安定面角度。4、检查单分析:安定面失控可以通过连续的非指令安定面配平来识别, 或者安定面配平发生在不适合当前飞行条件时。在人工飞行或在自动驾驶接通的飞行中,可以通过速度配平系统或自动驾驶配平指令自动安定面配平,由于指令的安定面配平会自动出现,因此飞行员需要考虑当前飞行状况,以确定是否存在安定面配平失控条件,例如:有些安定面配平动作会发生在速度、高度或形态改变时。在安定面失控条件下,机组应通过使用驾驶杆、主电动安定面配平和油门杆来保持飞机俯仰操纵。在自动驾驶( 如接通)脱开前,应紧握驾驶杆来保持飞机俯仰操纵并保留来自自动驾驶的任何升降舵指令。自动油门和自动驾驶脱开后,使用驾驶杆和油门杆来建立适当的俯仰姿态和空速。两个驾驶杆内都安装有“驾驶杆切断电门”。以安定面配平的反向移动驾驶杆可以切断安定面的配平,从而控制飞机俯仰姿态。(也就是说顶着杆向后打配平,或者带着杆向前打配平,都是没有任何反应的)主电配平切断电门设置在切断位断开了主电配平到安定面电动马达的电路,自动驾驶配平切断电门设置在切断位断开了自动驾驶配平和速度配平到安定面电动马达的电路。一般情况下配平电门切断后安定面电动马达就会停止工作,如果马达不能停止意味着配平切断电门内部失效或者电动马达的电源电路上的继电器卡滞故障,让安定面马达一直通电。当安定面失控时,记忆项目要求安定面配平切断电门将电动马达切断。使用人工配平轮可以获得全行程的安定面配平,且安定面失控并不需要在人工配平手轮上施加很大的力气使配平轮与离合器脱开,依据检查单描述安定面失控可以襟翼30或者40着陆。安定面失去配平灯仅在自动驾驶接通时亮,该灯内有2个灯组件,左侧灯组件对应自动驾驶A,右侧灯组件对应自动驾驶B,当稳亮时说明本侧自动驾驶不能配平安定面,相应侧的灯会明亮。按照检查单操作断开自动驾驶、断开自动油门,可以使用主电配平,如果主电配平不工作,执行《安定面配平不工作》检查单。安定面配平不工作常见原因:(1)安定面配平马达故障。这是最常见的故障。这种情况下自动驾驶和驾驶盘电门的电配平失效,可以使用任一配平手轮进行人工配平。使用配平手轮人工配平安定面时,马达脱开离合器并没有断开。(2)安定面马达堵塞或卡阻自动驾驶和驾驶盘电门不能进行电动配平。 通过任一配平轮可以超控卡阻来提供人工配平。齿轮箱里有两个内部制动(上图棘轮制动器)和一个机械离合器,离合器可以使安定面人工配平手轮输入超控安定面配平作动筒输入 ,离合器卡阻情况下人工转动配平轮需要的力比正常大。(3)安定面作动器堵塞或卡阻在正常的安定面配平过程中底部万向支架可以让丝杠前后移动,如果万向支架或者齿轮箱的卡阻将导致自动驾驶或驾驶盘电门不能进行电动配平,同时人工配平失效,结果是安定面不能配平。试飞证明即使安定面不工作,飞机也能够安全飞行并着陆。由于无法改变安定面的卡阻状态,应通过将着陆襟翼限制在15单位来将安定面的配平需求降至最低。注:安定面传动装置堵塞或卡阻可能是由于螺杆上结冰导致的。如果机组怀疑失效是由于结冰导致的,下降到较暖的温度然后再试一次。5、总结:“安定面失控”情况是电动马达不能停止,马达与齿轮机构正常机械连接,配平切断电门切断后马达与齿轮箱离合器正常分离,人工配平时正常力量即可。检查单允许襟翼30着陆,即使遇到复飞人工配平安定面相对容易。“安定面配平不工作”最好情况是电动马达失效,较严重情况是齿轮箱离合器与电动马达卡滞,需要较大力克服离合器,最严重情况是齿轮箱或者万向支架的卡阻导致丝杠不能驱动,综合考虑襟翼15着陆来将安定面的配平需求降至最低。飞行部二大队 曹继兴
-
发动机非正常起动有哪些? 提问人:冯锴B737NG飞机由两台CFM56-7发动机提供动力。发动机是双转子轴流式涡 轮风扇发动机。N1转子由一个风扇、一个低压压气机和一个低压涡轮构成。N2转子包括一个高压压气机和一个高压涡轮。N1和N2转子在机械上是独立的。N2转子驱动发动机齿轮箱。由引气驱动的起动机与 N2转子相连接。起动机工作需要增压空气和电源,来自引气系统的空气驱动起动机。 APU,外部地面气源车或另一台工作中的发动机可以提供引气源。在起动电门在地面(GRD)位时,起动电门使用电瓶电源关闭发动机引气活门并且打开起动活门,利用压缩空气压力转动起动机。发动机起动电门至于GRD位后,有以下现象:(1)EEC通电,全部发动机参数显示(如有交流电)。(2)APU功率提高,管道压力上升。(3)起动活门打开灯亮,N2开始上升。(4)EGT起动725℃红线出现。当起动活门打开时,起动机通过附件齿轮箱传动齿轮系统带动N2压气机旋转。当发动机加速到建议值(25% N2 或最大转速率)时,将发动机起动手柄提至慢车位会打开翼梁燃油活门和发动机燃油关断活门,并使EEC向燃烧室供油并点火。每台发动机都有两个点火电嘴。EEC预位由点火选择电门所选择的点火电嘴。1号发动机左点火电嘴由1#115V交流转换汇流条供电,2号发动机左点火电嘴由2#115V交流转换汇流条供电,2台发动机的右点火电嘴都是由115V交流备用汇流条供电。起始燃油流量指示比实际燃油流量约晚2秒,因此在发动机起动过程中,EGT上升可能出现在燃油流量指示之前。发动机起动原理简图如下:在起动机切断速度(约56% N2),起动电门的保持电磁线圈断电,发动机起动电门回到OFF位,发动机引气活门回到选择的位置,起动活门也关闭。 按照流程节点分起动电门在GRD位和起动手柄提起到IDLE位置来描述发动机起动方面故障。一、起动电门在GRD位置。1起动活门打开灯不亮发动机起动活门是“电控气动”活门。如果“起动活门打开灯”未亮,机组应当首先检查引气管道压力。如果引气压力没有问题,机组应将起动电门回到OFF位,联系地面机务检查。2 没有N2指示起动机的输出轴兼具“剪切保护销”的功能。如果起动机与附件齿轮箱之间的力矩过大,输出轴会由设计的应力集中点剪断。 “起动活门打开灯”亮,说明引气压力已经打开活门。如果N2转速完全不上升,则很可能是离合器故障,或者输出轴剪断所导致的。3 N2达不到要求值N2达不到最小的要求值20% ,通常是由于引气压力不足所导致的,机组应将起动电门回到OFF位联系地面机务检查。 此外,在高温、低气压、高海拔、顺风等条件下,机组通常会待N2高于25%且达到最大冷转后再提起动手柄。这对于减小“起动悬挂”和“热起动”是有一定帮助。4 N1 没有转速一般N2达到20%以上,N1开始有转速指示,如果N1仍然为零,则说明N1转子存在卡阻,需要把起动电门回到OFF,通知地面。二、发动机起动手柄在IDLE位置起动手柄提至IDLE位后,EEC开始控制HMU向燃烧室喷油,同时控制点火电路点火。燃油流量出现后,N1、N2和EGT逐渐上升。起动过程中发动机EEC提供非正常起动保护(只用于地面起动)在地面起动过程中,EEC监测发动机参数以探测即将发生的热起动、发动机失速、超过排气温度起动限制和湿起动。空中起动时,这些保护功能不起作用。1 湿起动原因可能为发动机未点火,EEC具备“湿起动”保护功能,提手柄后15秒如果EGT不上升EEC会关闭燃油计量活门,切断燃油继续进入燃烧室,但飞行员仍需切断起动手柄,这样可以关闭翼梁燃油关断活门,执行冷转程序,吹除燃烧室余油,以避免下次起动富油。执行完中止起动检查单通知机务排故,通知签派。2 起动悬挂EGT上升后,N1和N2不上升或上升缓慢,可能的原因是引气压力不足、顺风起动、燃油流量低。3 热起动EEC具备热起动保护功能。当提起起动手柄后如果出现 EGT 快速增高或 EGT 接近起动限制,则是热起动,且 EGT 数字读数周围的白框闪亮。需要注意的是起动电门此时还在GRD位。4起动活门打开起动电门跳回OFF位后,或者是根据检查单人工放到OFF位,如果“起动活门打开灯”仍亮,应执行《起动活门打开检查单》。《起动活门打开检查单》的处置流程,确认起动电门在OFF位后,如果“起动活门打开灯”仍亮,检查单会引导机组切断故障一侧的引气供应。只要供气被切断,起动机的输出轴就会收回,制动离合器与附件齿轮箱也就脱开了。5发动机稳定后无滑油压力指示附件齿轮箱驱动N2转动,同时也在驱动滑油增压泵。滑油增压泵不仅为发动机轴承提供润滑,同时还为起动机提供润滑。正常情况下,N2高于10%前,滑油压力即会上升;N2到达25%前,滑油压力即可高于13PSI,“滑油低压灯”熄灭。FCOM要求“发动机稳定在慢车后无滑油压力指示”应中止起动。如果发动机慢车稳定后,滑油压力出现但未超过13PSI,滑油低压灯仍亮,机组应当考虑执行《发动机滑油压力低检查单》,进而转至《发动机失效关停检查单》关车。6尾喷管着火一般尾喷口起火因为尾喷口有残油导致,发动机火警/过热探测环路不能探测尾喷口的着火,释放发动机灭火剂,也无法扑灭尾喷管失火。尾喷管失火,应当切断油路(关车),利用发动机风转吹除余油和余火。同时应当同时地面灭火设施就位待命。7起动完成后,发动机出现富油然后EGT快速升高是当发动机起动完成后(起动电门回到OFF位置),由于燃油计量活门的失控导致进入燃烧室的燃油很大,N1、N2、EGT快速上升,当发动机起动完成后,机组注意力可能在监控外部、与ATC或者地面维护人员通话,没有再关注发动机仪表,短时间内EGT可能出现超过950度情况,机组发现后需要马上切断发动机起动手柄,然后起动电门放在GRD位进行冷转,但需要特别注意的是起动电门从OFF到GRD位置要在N2小于20%,与前一次放在GRD位置间隔10秒飞行部十大队 翟志翔