搜索到
126
篇与
的结果
-
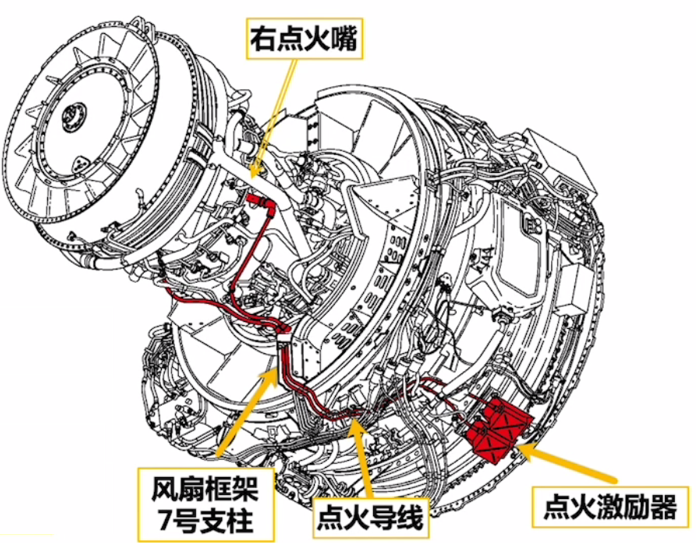
 起动电门的使用 作者:工程技术公司工程支援部 郭小兵 培训部飞行培训中心王勇B737NG/MAX每台发动机有左右2个点火系统,每个点火系统包括:点火激励器、点火导线、点火电嘴等,如下图。1发的左点火的工作电源是1#115V交流转换汇流条,右点火的工作电源是115V交流备用汇流条。2发的左点火的工作电源是2#115V交流转换汇流条,右点火的工作电源是115V交流备用汇流条。如下图:因为右点火工作电源是115V交流备用汇流条,对于飞行员来说点火系统只能在发动机起动时发现是否正常,为应对空中失去所有交流电或者更严重情况放行飞机前必须要求发动机右点火工作正常,所以公司SOP要求每天首班飞行,起动发动机时需选择在右点火。如果点火系统不工作,那么起动发动机提起起动手柄后15秒内EGT不上升,EEC会自动切断HMU内的燃油计量活门以切断燃油,飞行员也需要马上切断起动手柄以关断翼梁燃油关断活门来保证安全裕度,冷转一分钟,利用风转吹出积在燃烧室内的燃油,防止下次起动时出现富油情况。点火器的工作由起动电门、点火选择电门、起动手柄、EEC共同控制,原理如下图:在发动机地面起动期间根据点火选择电门的选择位置是左、右还是(BOTH)双点火位,当起动手柄提到IDLE位置后,点火激励器将115V交流电转为15000--20000V直流电,输出约14.5~16焦耳的能量。点火嘴使用此能量点燃燃烧室内的油/气混合气,火焰经过燃烧室后变成废气向后喷出推动高压涡轮和低压涡轮加速,直到N2转子加速到56%后,起动电门弹回到OFF位,此时EEC会停止点火指令。后续给发动机输送的燃油和从压气机来的空气在燃烧室内依靠火焰持续点燃,不需要点火电嘴持续点火,点火电嘴在起动后退出工作,发动机依然可以正常运转。EEC后续监控发动机工作情况,如果N2 出现非指令性的快速下降,左右两个点火器会同时点火,以挽救发动机。而活塞发动机在整个工作时段的每个工作循环内,为保证发动机正常运转不熄火停车,点火电嘴都要点火一次,点火电嘴电路必须始终接通。这也是涡轮风扇发动机点火系统与活塞发动机的重要区别。飞行程序要求在起飞、进近阶段、紧急下降、结冰天气、遇到或预计有中到大雨、冰雹或雨夹雪情况,起动电门要设置CONT(连续),在连续( CONT)位时向选择的点火器提供点火。在严重颠簸、火山灰环境、发动机高振动、双发失去推力、空中风转起动,起动电门要设置FLT(飞行位),在飞行( FLT)位时点火选择电门被旁通向两个点火器提供点火。除了上述所列情况平时不需要将起动电门设置CONT(连续)或者FLT(飞行位),过度(长时间)使用点火电嘴会造成电嘴烧蚀,从而降低或者失去点火能力 。下图是航线维护发现的点火电嘴烧蚀的图片。由于点火系统的频繁使用以及对于发动机安全运行的重要性,所以点火点嘴、点火导线等有时限进行检查或定期更换要求,一般737NG发动机每1800飞行小时更换点火点嘴,每4000飞行循环检查点火导线。
起动电门的使用 作者:工程技术公司工程支援部 郭小兵 培训部飞行培训中心王勇B737NG/MAX每台发动机有左右2个点火系统,每个点火系统包括:点火激励器、点火导线、点火电嘴等,如下图。1发的左点火的工作电源是1#115V交流转换汇流条,右点火的工作电源是115V交流备用汇流条。2发的左点火的工作电源是2#115V交流转换汇流条,右点火的工作电源是115V交流备用汇流条。如下图:因为右点火工作电源是115V交流备用汇流条,对于飞行员来说点火系统只能在发动机起动时发现是否正常,为应对空中失去所有交流电或者更严重情况放行飞机前必须要求发动机右点火工作正常,所以公司SOP要求每天首班飞行,起动发动机时需选择在右点火。如果点火系统不工作,那么起动发动机提起起动手柄后15秒内EGT不上升,EEC会自动切断HMU内的燃油计量活门以切断燃油,飞行员也需要马上切断起动手柄以关断翼梁燃油关断活门来保证安全裕度,冷转一分钟,利用风转吹出积在燃烧室内的燃油,防止下次起动时出现富油情况。点火器的工作由起动电门、点火选择电门、起动手柄、EEC共同控制,原理如下图:在发动机地面起动期间根据点火选择电门的选择位置是左、右还是(BOTH)双点火位,当起动手柄提到IDLE位置后,点火激励器将115V交流电转为15000--20000V直流电,输出约14.5~16焦耳的能量。点火嘴使用此能量点燃燃烧室内的油/气混合气,火焰经过燃烧室后变成废气向后喷出推动高压涡轮和低压涡轮加速,直到N2转子加速到56%后,起动电门弹回到OFF位,此时EEC会停止点火指令。后续给发动机输送的燃油和从压气机来的空气在燃烧室内依靠火焰持续点燃,不需要点火电嘴持续点火,点火电嘴在起动后退出工作,发动机依然可以正常运转。EEC后续监控发动机工作情况,如果N2 出现非指令性的快速下降,左右两个点火器会同时点火,以挽救发动机。而活塞发动机在整个工作时段的每个工作循环内,为保证发动机正常运转不熄火停车,点火电嘴都要点火一次,点火电嘴电路必须始终接通。这也是涡轮风扇发动机点火系统与活塞发动机的重要区别。飞行程序要求在起飞、进近阶段、紧急下降、结冰天气、遇到或预计有中到大雨、冰雹或雨夹雪情况,起动电门要设置CONT(连续),在连续( CONT)位时向选择的点火器提供点火。在严重颠簸、火山灰环境、发动机高振动、双发失去推力、空中风转起动,起动电门要设置FLT(飞行位),在飞行( FLT)位时点火选择电门被旁通向两个点火器提供点火。除了上述所列情况平时不需要将起动电门设置CONT(连续)或者FLT(飞行位),过度(长时间)使用点火电嘴会造成电嘴烧蚀,从而降低或者失去点火能力 。下图是航线维护发现的点火电嘴烧蚀的图片。由于点火系统的频繁使用以及对于发动机安全运行的重要性,所以点火点嘴、点火导线等有时限进行检查或定期更换要求,一般737NG发动机每1800飞行小时更换点火点嘴,每4000飞行循环检查点火导线。 -
浅析风切变 浅析风切变作者: 飞行部二大队耿 跃一、背景低空风切变被称为是飞行的“无形杀手” 。有资料表明,自1943年以来,全球范围内与低空风切变相关的飞行事故导致了一千四百多人遇难。1970年至1985年期间,至少发生了30起与低空风切变相关的飞行事故,导致七百多人遇难,其中着陆28起,起飞2起。据国际民航组织(ICAO)统计,大约30%的空难由天气原因引起或者与天气因素有关,其中低空风切变是最危险的因素之一。来自美国国家运输安全委员会(NTSB)的数据表明:自1975年以来,在美国由于天气原因造成的恶性空难事故中,80%是低空风切变造成的二、风切变的介绍1.定义:风切变 : 风向或风速的快速变化严重风切变:风向或风速的快速变化导致空速的变化大于15海里/小时或垂直速度的变化大于150米(500英尺)/分钟。2、低空风切变形成的原因:低高度的风速风向变化会对飞机起降造成严重的危害,这些变化是由各种气象条件所引起的,如:地形条件,逆温现象,海陆风,锋面系统,强地面风。最严重的风切变往往伴随着雷暴和阵雨产生。1.雷暴2.微下击暴流3.其他情况:地形、锋面、海陆风等三、风切变的危害1、可控飞行撞地(CFIT)风险。机组未严格落实风切变机动改 出程序要求(推力、姿态相关要求),未使用最大推力或盲目收油 门,使飞机能量不足以改出风切变,不能形成足够的正上升率,极易造成飞机长时间处于风切变、“失速”掉高度、甚至有可控撞地风险。2、“擦尾及冲偏出跑道”风险。机组操纵飞机在大风乱流低高度阶段易进入管道效应,决断意识不强,如果机组注意力分配不当、偏差发现偏晚以及标准喊话不及时,当风切变警告发生时,机组可能会处置动作迟缓,造成飞机二次接地、擦尾以及冲偏出跑道风险。3、“五防”类风险。风切变机动飞行是复杂状态改出、是一种特情处置,如果机组未针对大风乱流天气制定风切变及复飞相关预案, 极易造成飞机突破管制员指令高度、飞错复飞程序或轨迹以及 TCAS 冲突等风险。4、“设备”类使用超限风险。风切变机动飞行处置不当,比如: 未按手册规定按压 TOGA 电门,未保持起始姿态 15°(注:低高度复飞姿态要求除外),导致飞机在风切变改出及后续复飞过程中,长时间处于姿态及油门不匹配的异常状态中,极易造成空速快速增加超过襟翼使用空速限制。5、“颠簸伤人”风险。机组在完成风切变机动改出动作时,动作粗猛,姿态、油门瞬间输出变化量过大,易造成机体结构过载以及旅 客受伤等不安全事件发生。四、ND上预测风切变显示和符号五、风切变的分类六、雷达探测原理七、探测区高度 2300 英尺以下,在飞机的起飞和着陆过程中,无论雷达打开或关闭,都会启动前视风切变功能。在启动之后,天气扫描区范围将下降到 120 度,以便更快实现天气和风切变信息的更新。在 1200 英尺以下和 5 海里范围内,在驾驶舱内显示报警信息。如果在 MAP 或 TEST 方式雷达接通并且系统探测到风切变事件,则系统显示自动变为 WX+T 方式来显示气象和风切变符号。所选范围不会自动改变。八、预测风切变抑制条件1、预测风切变报警会被实际的风切变警告(飞机在风切变中)、前视地形报警、或基于无线电高度的警报抑制。2、起飞和着陆过程中,新的预测风切变警戒报警在80海里/小时和400英尺无线电高度之间被抑制,新的警告报警在100海里/小时和50英尺的无线电高度之间被抑制。这些抑制不能消除现有的预测风切变报警。如果警告/警戒事件出现在那些边界前,警告/警戒将会保留在显示上且会出现完整的音响喊话。如图所示:这是一个关于风切变警告警戒的概述图起飞时,从起飞滑跑开始(0海里/小时)直到飞机达到80海里/小时, 警告和警戒都可用。从80海里/小时直到飞机达到100海里/小时,只有警告可用。从400英尺到1200英尺,警告和警戒都可用。从飞机达到100海里/小时直到50英尺期间所有新报警不可用。下降时,在飞机穿 过 1200 英尺到 400 英尺期间,警告和警戒可用,从 400 英尺到 50 英 尺期间只有警告可用。从 50 英尺直到接地(0 英尺),所有新报警都不可用。EGPWS探测的风切变警告(WINDSHEAR)不受抑制。九、风切变的处置1、避开如确认或怀疑存在风切变,应绕飞、延迟起飞或中止进近。a)当飞行员在气象报文中看到以下信息时,需特别注意: 雷暴、强降水、扬尘、温度露点差较大(差值越大,湿度越低), 包括其它线索如阵风、温度变暖趋势、积云等。b)地面风切变探测系统c)机载风切变警告系统d)风切变的目视迹象e)飞行员报告飞行员不能过于依赖从驾驶舱目视观察来发现风切变。虽然风切变本身不会被目视观测,但是它形成的效果是可以被观测到的。1)夜晚,闪电也许是唯一的目视线索2)白天,以下线索可以为飞行员提供一定的参考:2、预防预防措施应充分考虑推力、跑道、襟翼、速度、自动设备的影响,做出合适的选择。在很多情况下,飞行员需要仔细权衡,选择当前最佳预防措施。1)起飞时,避免在阵风期间抬轮。如果VR附近遇到阵风,如空速指示迟钝或空速指示急增,瞬间延迟抬轮。这一稍微延迟抬轮可使飞机有额外的时间在阵风中加速,并且增加的空速能提高机尾离地裕度。不要过早抬轮或使用比正常抬轮率大的速率来试图离地和减小阵风的影响,因为这样会降低机尾离地裕度。按需限制驾驶盘的输入,保持机翼水平。过量使用驾驶盘增加扰流板放出量,导致机尾离地高度减小。所有这些要素提供了最大的能量,使飞机在阵风中增速的同时保持了飞机在离地时的机尾离地高度。在此点飞机处于带有侧滑的杆舵交叉状态。离地后慢慢使驾驶盘和方向舵回中,可使飞机缓慢平稳地从侧滑中改出。2)进近和着陆3、改出1)风切变警戒:2)风切变警告注:起飞滑跑过程中遇到风切变:如果在V1前遇到风切变,在V1时执行中断起飞则跑道长度可能不够。速度达到VR时,以正常速率抬轮至15度俯仰姿态。一旦升空,执行风切变脱离机动飞行。如果在接近正常抬轮速度时遇到风切变并且空速突然下降,也许剩余的跑道不足以加速至正常起飞速度。如果没有足够长的跑道让飞机停止,即使空速很低,也要在距离跑道末端至少2,000英尺处正常抬轮。在剩余跑道上需要高于正常姿态离地。确保调定最大推力。(当跑道边灯由白色变为黄色时,代表剩余跑道长度为2000英尺)3)进近中的风切变警戒4)进近中的风切变警告5)不可接受的飞行轨迹偏离不可接受的飞行轨迹偏离是指1000英尺AGL以下,正常稳定的飞行状态发生不可控制的变化,超出下列任一情况:15海里/小时指示空速,500英尺/分钟垂直速度,5°俯仰姿态,偏离下滑道 1 个点,在较长一段时间内,油门杆位置不正常。6)风切变脱离机动飞行备注:随着空速的减小,向后的带杆力会增加。在所有情况下,导致间歇抖杆或起始抖振的俯仰姿态是俯仰姿态的上限。可能要求间歇性抖杆飞行,以获得足够的地形间隔。柔和、稳定的操纵可避免俯仰姿态过量或失速。注:如果EEC在正常方式,将推力手柄前推到底可获得最大推力。如果即将触地,将推力手柄前推到底。不要超出俯仰限制指示。如果TO/GA不可用,脱开自动驾驶和自动油门,人工飞行。警告:严重风切变可能超出AFDS的性能。 准备断开自动驾驶和自动油门并人工飞行。(十)风切变的知识点1、风切变中指引的工作原理自动驾驶仪与飞行指引仪,提供可靠的修正动作,来抵消大多数风切变。自动油门系统用对速度的任何增、减提供快速响应的方法,也对风切变改出进行支援。一般飞行员会认为指令的动力等级超出必要值,但实际上是情况所需要的动力。起飞或复飞当用F/D起飞或复飞时,如遭遇风切变,F/D俯仰指令杆将提供指令以保持目标速度,直到垂直速度降至约+600英尺/分钟。此时,F/D俯仰杆指令15度上仰姿态。如垂直速度继续下降,F/D继续指令一个15度的俯仰姿态,直到达到大约的抖杆速度。它随后指令俯仰姿态,这将导致抖杆器间断性的工作。在飞机通过风切变的情况时,F/D程序将被颠倒过来。当爬升率增至高于约+600英尺/分钟,F/D指令俯仰姿态,其结果是加速回到目标速度。当A/P或F/D复飞时,A/P与F/D二者均以类似的方式工作。进近和着陆当做ILS进近时,如遭遇风切变,F/D与A/P均力图保持飞机高度或在截获下滑道后保持下滑道,而不考虑迎角或抖杆器的限制。如果飞行员不采取按压TO/GA电门或断开自动驾驶而进行人工飞行的干涉措施,空速可能会低于抖杆速度并且进入失速。2、风切变机动飞行时,如何判断飞机脱离风切变?PFD上的目视警告显示是否可以作为相应的依据PFD上显示的“WIND SHEAR”目视警告信息,在1500ft AGL下激活显示,语音报警只激活一次,但是目视警告信息会一直持续到飞机脱离该次风切变;该警告信息一旦1500英尺一下被激活,在整个风切变改出机动飞行中都有效,尽管高度已经突破1500ft AGL。该目视警告信息可作为脱离风切变的参考依据之一,但不可以作为唯一依据,建议必须还要根据飞机的实际飞行状态进行综合判断,因为前方的飞行条件未知,飞机有可能会进入另一个风切变。综合波音意见和手册信息,脱离风切变后的操作:风切变警告消失后(包括驾驶舱语音警告和 PFD下方红色WINDSHEAR目视警告),不可接受的飞行轨迹偏离不再继续,并且速度和上升率开始明显增加,机组确认飞机正在恢复正常飞行时,可认为飞机已脱离风切变:3.进近风切变(防止襟翼超速)4、脱离风切变后的机动飞行动作风切变机动飞行时超出襟翼限制速度是可接受的,脱离风切变以后进行正常的复飞动作程序,经证实,脱离风切变后增速收襟翼时,波音不建议收油门来避免超速的情况,特别是在高度较低时,因为前方气象条件未知,有可能会使飞机进入另一个风切变,只是及时的控制飞机姿态,根据速度收襟翼,根据正上升率收起落架执行正常的复飞程序。5、起飞滑跑时遭遇顺风切变,空速不增加,飞行员延迟抬轮时机,最晚于跑道末端2000ft时抬轮,这样在高原机场大重量高温时,很容易造成轮胎超速,该如何应对?首先是跑道末端2000ft英尺抬轮,对于足够长的跑道,不一定要到跑道末端2000英尺速度就满足了,但是对于超轮速的情况,波音性能代表和飞行员的相关解释是飞机的轮速涉及已经考虑到该问题,飞机的验证限制大约达到当前轮速限制的1.4倍左右,确定可以提供足够的安全裕度,起飞后正常执行程序即可。爆胎的情况,飞行员可以第一时间感觉到,所以当出现爆胎的情况时,建议飞行员根据实际状态选择是否收上起落架。6、非正常机动飞行-风切变 “改平机翼的同时抬机头至起始俯仰姿态15°”,如何理解“起始俯仰姿态15°?是始终保持还是要参考升降速度指示,在低高度和高高度有什么区别? 检查单机动飞行章节很明确,按检查单执行。15°为起始姿态,不是要求始终保持15°姿态,风切变改出允许间歇性抖杆,不能持续抖杆。在临界的低高度情况下,如果可能以空速换取高度。
-
Z世代飞行学员来了:飞行培训该如何 “读懂”他们? 作者:培训部飞行培训中心 曹泽宇何为Z世代?Z世代,当前也称为“网生代”“互联网世代”“数媒土著”,是欧美学者在上世纪80年代所提出的代际概念。Z世代通常是指1995年至2009年出生的一代人,作为互联网浪潮中成长的“原住民”,他们与智能手机、社交软件深度绑定,物质生活优渥,却也面临信息过载的环境,身上的标签扎堆,常被前辈群体认为他们“太自我”“不踏实”“佛系摆烂”,但前辈的不解,并非 Z 世代的“过错”,本质是社会快速变迁下的代际差异所致。代际更替是社会发展的必然,社会经济文化技术变迁越剧烈,代际差异越突出。在重大历史事件中共同成长的群体,会形成独特的“社会代”。过去半个多世纪,中国社会经济变迁尤为急速,改革开放后更是用数十年跨越他国百年历程,代际差异更显著、跨度更短、更替更快,各代经历、生活、文化、教育差异明显,观念与行为冲突更突出。Z世代作为伴随互联网成长、深度融入城镇化与新经济浪潮的青年群体,其心理特质既带着时代赋予的鲜明印记,也对传统职场管理与培训模式提出了全新挑战。精准把握其心理特征,构建适配的管理与培训体系,是激发Z世代活力、实现团队高效协同的关键。Z世代青年有什么样的心理特性?(一)自我意识凸显,追求个性化与价值认同作为互联网原住民,Z世代成长于物质丰裕、信息多元的环境,未经历物质匮乏的困境,“自我实现”成为核心心理诉求。他们拒绝被单一标签定义,热衷二次元、国风、潮玩等小众圈层文化,在职场中反感“螺丝钉”式的被动定位,更看重工作的意义感、趣味性与个人价值。对权威的服从度较低,追求平等对话,若工作无法满足自我表达与价值认可,易产生抵触情绪,甚至选择“裸辞”“躺平”作为心理防御。(二)高预期与现实落差并存,焦虑与韧性交织Z世代是教育水平最高的代际群体,52%的Z世代接受高等教育,80%完成高中阶段教育,高学历赋予其高眼界、高认知,也催生了对职业发展、生活品质的高期待。但面对就业竞争、学历贬值、房价压力等现实问题,理想与现实的巨大落差易引发“同辈压力”与“内卷焦虑”。不过,他们并非一味消极,焦虑背后是对成长的渴望,既会通过“搞钱”、做“斜杠青年”主动掌控人生,也能在压力过大时以“佛系”心态缓冲,具备较强的心理韧性与试错意愿。(三)深度网络化,社交呈现“线上社牛、线下社恐”矛盾性Z世代与互联网深度绑定,触网率超96%,日均上网比例超70%,是网络社交文化的核心参与者。他们在线上能快速建立“赛博友谊”,在圈层中无话不谈,但线下社交能力相对薄弱,对低质量、功利性的无效社交极为排斥,呈现“社恐”与“社牛”的分裂状态。同时,互联网普及打破了城乡、阶层壁垒,出身乡村、小城镇的Z世代不再是网络边缘人,反而凭借时间优势成为网络文化的活跃主体,身份认同更趋多元,不再被地域、出身单一标签束缚。(四)务实理性,注重实际回报与情绪价值Z世代见多识广,对职场画饼、形式主义、PUA等行为难以接受,职场诉求清晰务实:薪资待遇、工作生活平衡、成长空间是核心考量,“给足情绪价值,不如给足实际回报”成为共识。他们不迷信资历,更看重能力与付出的对等回报,对“先苦后甜”的长期叙事接受度低,偏好即时反馈与短期激励。与此同时,他们对职场中的尊重、认可极为敏感。相较于单纯的物质激励,正向的情绪反馈更能有效提升其归属感与忠诚度。可以看到,Z世代的青年并非人人“摆烂”“躺平”,他们追求自由、多元也更为务实,既热烈又清醒。如今越来越多Z世代飞行学员加入公司,既为公司注入了新鲜活力,也凭借其鲜明的时代特质,展现出与众不同的精神面貌。作为培训部的一名飞行理论教员,可以说是公司里最先与他们深度接触的群体,授课时的朝夕相处也让我对于结合Z世代飞行学员特点来开展飞行培训工作有几点思考。(一)培训理念:从“服从灌输”转向“理解赋能”传统培训以“让学员记住规则、服从指令”为核心,强调按流程做、别出错,忽视学员对规则底层逻辑的理解。Z世代学员则追求“知其然更知其所以然”,反感机械记忆,希望通过理解本质提升能力,而非被动接受。那么在进行培训时,教员在培训前首先明确“能力地图”:将培训内容拆解为“知识(Knowledge)、技能(Skill)、态度(Attitude)”三层,让学员清晰知晓“学什么、为什么学、学完能解决什么问题”,减少学习迷茫。其次在培训中树立平等教学理念,摒弃“教员绝对权威、学员只能倾听”的模式,强调教学相长,教员是引导者而非管理者,运用引导式教学形式鼓励学员提问、质疑、讨论,在模拟机或IPT、SCT上允许合理试错,让年轻学员感受到被尊重,激发学习主动性。(二)教学方法:从单向讲授转向互动式、沉浸式教学传统教学以教员讲、学员听为主,形式单一、缺乏互动。Z世代学员成长于短视频、游戏化学习环境,习惯互动、体验与即时反馈,被动讲授易导致学习倦怠、效率低下。在授课过程中采用引导式教学,选取真实运行案例(如某航班进近时遇风切变的处置过程),组织学员分组讨论风险点、决策依据、操作优化方案,教员引导总结。课堂中角色互换,部分课程内容可交由学员进行讲解,根据费曼学习法(Concept概念、Review回顾、Simplify简化、Teach教给别人)步骤使学员通过自我知识准备与回顾并面向其他学员进行讲解的方式加深对知识点的理解,既能锻炼学员表达能力,又使学员能够记牢知识点。建立沉浸式教学环境,通过使用IPT、SCT等设备模拟故障场景,使学员建立驾驶舱情景意识。还可将理论知识点设计成答题闯关、积分竞赛等小游戏,学员通过闯关获得积分、排名,激发学习兴趣,适配Z世代的游戏化学习习惯。(三)营造开放包容的培训文化倡导“提问无罪、试错有理”的理念,鼓励学员在培训中大胆提问、主动质疑,即使提出的想法不成熟,教员也应耐心引导,而非否定打压,营造轻松、开放的学习氛围。弱化身份标签,培训中不强调教员、学员身份,只关注教学质量与学习效果,让年轻学员敢于表达、敢于尝试,消除怕犯错、怕被骂的心理顾虑,多给予学员正向情绪反馈,提升学员的认同感与归属感,让学员发自内心地觉得,自己身处培训部这个温暖的大家庭。通过以上几点思考我们明晰Z世代飞行学员的自我、务实、网络化等鲜明心理特质,也明确飞行培训需从理念、方法、文化多维度革新。飞行事业关乎安全与责任,而Z世代终将成为民航事业的中坚力量。适配其心理特质的培训革新,不仅是提升培训效率、激发学员潜力的务实之举,更是传承民航精神、培育新时代合格飞行人才的有力举措。当Z世代的个性活力与飞行行业的严谨规范实现同频共振,当培训体系的人文温度与职业要求的专业深度达成有机融合,他们必将以清晰的价值认知、扎实的专业能力、坚韧的责任担当,驾驭梦想的翅膀翱翔蓝天,为中国民航事业的高质量发展书写属于Z世代的精彩篇章。
-
Z世代飞行学员来了:飞行培训该如何 “读懂”他们? 作者:培训部飞行培训中心 曹泽宇何为Z世代?Z世代,当前也称为“网生代”“互联网世代”“数媒土著”,是欧美学者在上世纪80年代所提出的代际概念。Z世代通常是指1995年至2009年出生的一代人,作为互联网浪潮中成长的“原住民”,他们与智能手机、社交软件深度绑定,物质生活优渥,却也面临信息过载的环境,身上的标签扎堆,常被前辈群体认为他们“太自我”“不踏实”“佛系摆烂”,但前辈的不解,并非 Z 世代的“过错”,本质是社会快速变迁下的代际差异所致。代际更替是社会发展的必然,社会经济文化技术变迁越剧烈,代际差异越突出。在重大历史事件中共同成长的群体,会形成独特的“社会代”。过去半个多世纪,中国社会经济变迁尤为急速,改革开放后更是用数十年跨越他国百年历程,代际差异更显著、跨度更短、更替更快,各代经历、生活、文化、教育差异明显,观念与行为冲突更突出。Z世代作为伴随互联网成长、深度融入城镇化与新经济浪潮的青年群体,其心理特质既带着时代赋予的鲜明印记,也对传统职场管理与培训模式提出了全新挑战。精准把握其心理特征,构建适配的管理与培训体系,是激发Z世代活力、实现团队高效协同的关键。Z世代青年有什么样的心理特性?(一)自我意识凸显,追求个性化与价值认同作为互联网原住民,Z世代成长于物质丰裕、信息多元的环境,未经历物质匮乏的困境,“自我实现”成为核心心理诉求。他们拒绝被单一标签定义,热衷二次元、国风、潮玩等小众圈层文化,在职场中反感“螺丝钉”式的被动定位,更看重工作的意义感、趣味性与个人价值。对权威的服从度较低,追求平等对话,若工作无法满足自我表达与价值认可,易产生抵触情绪,甚至选择“裸辞”“躺平”作为心理防御。(二)高预期与现实落差并存,焦虑与韧性交织Z世代是教育水平最高的代际群体,52%的Z世代接受高等教育,80%完成高中阶段教育,高学历赋予其高眼界、高认知,也催生了对职业发展、生活品质的高期待。但面对就业竞争、学历贬值、房价压力等现实问题,理想与现实的巨大落差易引发“同辈压力”与“内卷焦虑”。不过,他们并非一味消极,焦虑背后是对成长的渴望,既会通过“搞钱”、做“斜杠青年”主动掌控人生,也能在压力过大时以“佛系”心态缓冲,具备较强的心理韧性与试错意愿。(三)深度网络化,社交呈现“线上社牛、线下社恐”矛盾性Z世代与互联网深度绑定,触网率超96%,日均上网比例超70%,是网络社交文化的核心参与者。他们在线上能快速建立“赛博友谊”,在圈层中无话不谈,但线下社交能力相对薄弱,对低质量、功利性的无效社交极为排斥,呈现“社恐”与“社牛”的分裂状态。同时,互联网普及打破了城乡、阶层壁垒,出身乡村、小城镇的Z世代不再是网络边缘人,反而凭借时间优势成为网络文化的活跃主体,身份认同更趋多元,不再被地域、出身单一标签束缚。(四)务实理性,注重实际回报与情绪价值Z世代见多识广,对职场画饼、形式主义、PUA等行为难以接受,职场诉求清晰务实:薪资待遇、工作生活平衡、成长空间是核心考量,“给足情绪价值,不如给足实际回报”成为共识。他们不迷信资历,更看重能力与付出的对等回报,对“先苦后甜”的长期叙事接受度低,偏好即时反馈与短期激励。与此同时,他们对职场中的尊重、认可极为敏感。相较于单纯的物质激励,正向的情绪反馈更能有效提升其归属感与忠诚度。可以看到,Z世代的青年并非人人“摆烂”“躺平”,他们追求自由、多元也更为务实,既热烈又清醒。如今越来越多Z世代飞行学员加入公司,既为公司注入了新鲜活力,也凭借其鲜明的时代特质,展现出与众不同的精神面貌。作为培训部的一名飞行理论教员,可以说是公司里最先与他们深度接触的群体,授课时的朝夕相处也让我对于结合Z世代飞行学员特点来开展飞行培训工作有几点思考。(一)培训理念:从“服从灌输”转向“理解赋能”传统培训以“让学员记住规则、服从指令”为核心,强调按流程做、别出错,忽视学员对规则底层逻辑的理解。Z世代学员则追求“知其然更知其所以然”,反感机械记忆,希望通过理解本质提升能力,而非被动接受。那么在进行培训时,教员在培训前首先明确“能力地图”:将培训内容拆解为“知识(Knowledge)、技能(Skill)、态度(Attitude)”三层,让学员清晰知晓“学什么、为什么学、学完能解决什么问题”,减少学习迷茫。其次在培训中树立平等教学理念,摒弃“教员绝对权威、学员只能倾听”的模式,强调教学相长,教员是引导者而非管理者,运用引导式教学形式鼓励学员提问、质疑、讨论,在模拟机或IPT、SCT上允许合理试错,让年轻学员感受到被尊重,激发学习主动性。(二)教学方法:从单向讲授转向互动式、沉浸式教学传统教学以教员讲、学员听为主,形式单一、缺乏互动。Z世代学员成长于短视频、游戏化学习环境,习惯互动、体验与即时反馈,被动讲授易导致学习倦怠、效率低下。在授课过程中采用引导式教学,选取真实运行案例(如某航班进近时遇风切变的处置过程),组织学员分组讨论风险点、决策依据、操作优化方案,教员引导总结。课堂中角色互换,部分课程内容可交由学员进行讲解,根据费曼学习法(Concept概念、Review回顾、Simplify简化、Teach教给别人)步骤使学员通过自我知识准备与回顾并面向其他学员进行讲解的方式加深对知识点的理解,既能锻炼学员表达能力,又使学员能够记牢知识点。建立沉浸式教学环境,通过使用IPT、SCT等设备模拟故障场景,使学员建立驾驶舱情景意识。还可将理论知识点设计成答题闯关、积分竞赛等小游戏,学员通过闯关获得积分、排名,激发学习兴趣,适配Z世代的游戏化学习习惯。(三)营造开放包容的培训文化倡导“提问无罪、试错有理”的理念,鼓励学员在培训中大胆提问、主动质疑,即使提出的想法不成熟,教员也应耐心引导,而非否定打压,营造轻松、开放的学习氛围。弱化身份标签,培训中不强调教员、学员身份,只关注教学质量与学习效果,让年轻学员敢于表达、敢于尝试,消除怕犯错、怕被骂的心理顾虑,多给予学员正向情绪反馈,提升学员的认同感与归属感,让学员发自内心地觉得,自己身处培训部这个温暖的大家庭。通过以上几点思考我们明晰Z世代飞行学员的自我、务实、网络化等鲜明心理特质,也明确飞行培训需从理念、方法、文化多维度革新。飞行事业关乎安全与责任,而Z世代终将成为民航事业的中坚力量。适配其心理特质的培训革新,不仅是提升培训效率、激发学员潜力的务实之举,更是传承民航精神、培育新时代合格飞行人才的有力举措。当Z世代的个性活力与飞行行业的严谨规范实现同频共振,当培训体系的人文温度与职业要求的专业深度达成有机融合,他们必将以清晰的价值认知、扎实的专业能力、坚韧的责任担当,驾驭梦想的翅膀翱翔蓝天,为中国民航事业的高质量发展书写属于Z世代的精彩篇章。
-
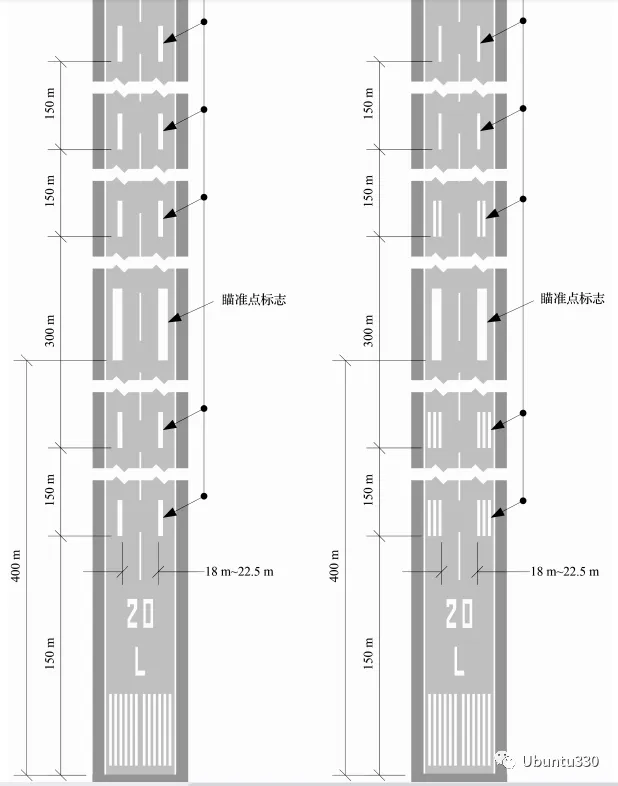
大白和小白 网上有部分人在讨论重着陆问题,其中一个观点提到,国内机场的接地带标志有两种标准,一种是ICAO标准,特征是2小白1大白3小白,一种是FAA标准,特征是1小白1大白4小白;而FAA标准比ICAO标准的瞄准点距离跑道入口少了100米,所以容易导致机组仓促接地,引发重着陆。所以,国内到底有多少机场是按FAA标准画的线呢?答案是,并没有。俗话说,人背不能怨社会。手眼功夫不行,不能盲目责怪机场当局。国内机场全都是按MH5001画的接地带标志,没有一个按FAA标准画的。虽然个别画的有错误,但只会导致拉飘,这又是为什么呢?我国的MH5001《民用机场飞行区技术标准》源自ICAO附件十四,基本没区别,也可以认为就是ICAO标准。其中关于接地带标志一共两页半内容,我们一来学习下:其中一页是样图,如上,左右两种都是标准的接地带标志,右侧标志线分几道杠,在低能见的时候可以给机组更多帮助。姑且把左侧的表达简化为110111,右侧表达为330211,其中0表示大白块瞄准点,方便后续讨论。按说走遍天下皆110111或330211,如上图;可是我们多数情况下看到的如下图:这样的情况不仅仅是国内,而且遍布全世界。FAA的标准恰恰是302211,难道遍地都是FAA标准的画法?ICAO玩不过美帝?还有这么多玩双标的机场,左边330211,右边302211,甚至一头330211,另一头302211。这些个机场当局能有多么不严谨?我们继续看标准原文:瞄准点的位置大白的位置和尺寸如上表,但是还有一句话:"在跑道装有PAPI灯时,标志的开始端应与目视进近坡度的起点重合"。由于世界上的运输机场绝大部分都安装了PAPI灯光系统,所以上面这个表也就没什么用了,瞄准点位置只和PAPI有关,和400米无关。而PAPI灯的位置,在机场细则可以查到,基本上在300-480米之间,而非固定值300米,这与跑道纵坡、常见机型眼-轮高、设计跑道入口高有关。尤其是枢纽机场,一般都在380米或以上,因为必须考虑宽体机;如果你看到的是290米,则大白一定是300米,然后考虑了灯杆高度和3度下滑投影,可以反算出灯具高出接地带50厘米。从这一点可以看出,机场当局那是相当的严谨。问题来了,既然大白要对齐300-480,假设某个机场是320米,第一对三道杠小白在入口150米处,第二对三道杠小白就应该在入口300米处,这对小白的长度是22.5米,会造成和大白黏在一起,在跑道上形成一对手榴弹形状的图案。为了避免这个尴尬,ICAO规定:“成对标志的纵向间距必须为150m,自跑道入口处开始。与瞄准点标志相重合或位于其50m范围内的各对接地带标志必须删去。”于是第二对小白会被挪到大白的后面出现,就形成了302211的格局,这可是正宗ICAO标准,并非FAA标准。所以,国内枢纽机场的跑道,大部分是330211格局,看上去是ICAO标准,实际上也是;支线机场的跑道,大部分是302211格局,看上去是FAA标准,实际上是正宗ICAO标准;有些支线机场跑道,采用了330211格局,看着像ICAO标准,但很可能是:画错了,例如运城、大同、恩施等机场。虽然画错了,机场也不会为重着陆背锅,因为PAPI灯比大白更靠近跑道入口,只会偶尔造成拉飘。那如何区分FAA标准呢?FAA的标准制定的比较早,所以大白是固定位置的,就是300米,不考虑PAPI灯的位置;而PAPI灯却要顾及跑道纵坡、常见机型眼-轮高、设计跑道入口高,所以会安装到比大白更远的位置,如图:所以,飞到美帝的重型机,要注意手法,千万别追大白落地。标准都学到这里了,索性就学完,2400米以下的跑道,不再是110111或330211格局,而是按长度设4、3、2、1对,跑道越短,大白的位置越靠近入口,如图:2400米以下跑道的4对标志1500米以下跑道的3对标志900米以下跑道的1对标志日本还有很黄很八格牙路的画法,到底是为什么,欢迎各位留言竞猜。最后,关于重着陆,除了翻看下之前的扒一扒828,还可以朗读以下口诀各200遍:目光长远永平安目光短浅必触雷瞄准点用来瞄准接地带用来接地simpler is safer越简单,越安全