搜索到
126
篇与
的结果
-
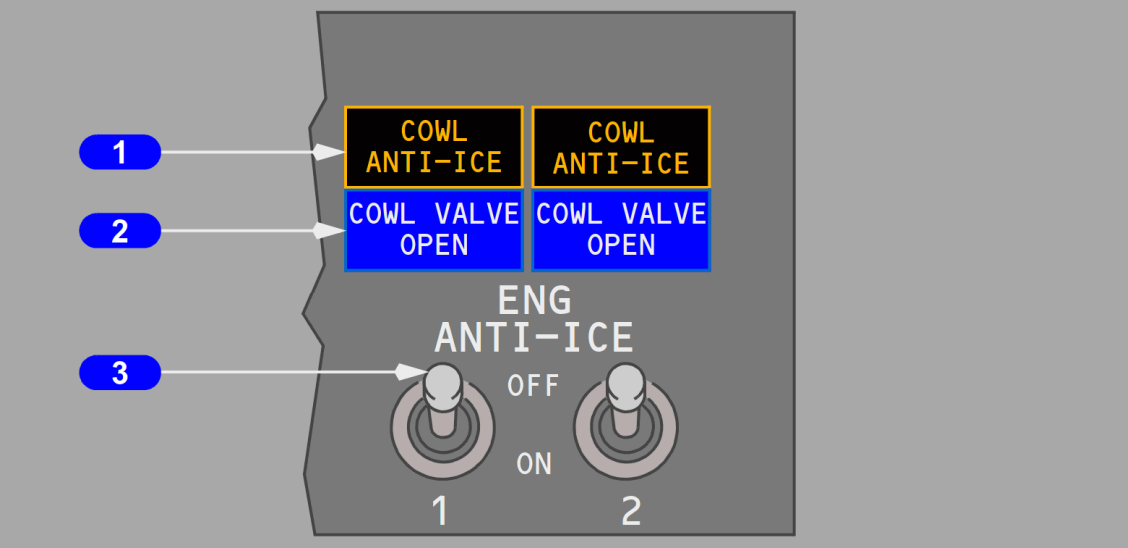
 咨询波音的若干问题回复 问题1:在紧急下降检查单中要求双发油门杆减到最小或根据防冰情况按需调节,是否意味着在慢车位置不能打开发动机防冰活门?波音回复如下:RESPONSE:The intent of the step is to maintain adequate thrust to ensure the engine anti-ice valves are open. If the thrust is adequate, the COWL VALVE OPEN lights are illuminated dim and the amber TAI alert is not displayed. If the COWL VALVE OPEN lights remain illuminated bright with the engines at idle, the thrust should be increased slightly, up to a minimum of 30% N1. 这一步骤的目的是保持足够推力以确保发动机防冰活门打开,如果推力足够COWL VALVE OPEN灯是暗亮,琥珀色TAI不会显示,如果发动机在慢车时COWL VALVE OPEN灯保持明亮,推力应该缓慢增加直到最小30% N1。问题2为什么在人工恢复和飞行操纵卡阻受限检查单中不需要将TCAS模式设置 TA 或者TA only模式? 波音回复如下:RESPONSE:All non-normal checklists are evaluated on a case-by-case basis. There are no blanket criteria defining when the Transponder Mode selector must be set to TA because malfunctions are very situational. Putting the Transponder Mode selector to TA into all relevant checklists is not done because, depending on the extent of the malfunction and the conditions, there may be capability to accomplish an RA action. The probability of a severe malfunction, which limits climb capability and/or maneuverability, combined with a RA event are low enough that it does not warrant a TCAS-TA step in many checklists.所有非正常的检查表都是根据具体情况进行评估的。由于故障非常具有情境性,因此没有明确的标准来定义应答器模式选择器何时必须设置为TA。将应答器模式选择器放入所有相关的检查清单中是不可行的,因为根据故障的程度和条件,可能有能力完成RA操作。严重故障(限制爬升能力和/或机动性)与RA事件相结合的概率很低,因此在许多检查清单中不需要进行TCAS-TA步骤。问题3如果在低于飞行高度层 FL220 的爬升和下降过程中一个 DEU 失效且失效侧自动驾驶接通,• 两个飞行员飞行显示上的飞行指引仪俯仰指令杆消失• 在高度截获( ALT ACQ)时飞行指引仪俯仰指令杆重新出现• 自动驾驶接通于 CWS P 方式• 失效侧自动驾驶的高度层改变( LVL CHG), VNAV 与 V/S 不可用。如果 DEU 在飞行高度层 FL220 以上时失效,自动驾驶与飞行指引仪不受影响。为什么高度220是一个临界高度?波音回复如下:RESPONSE:FL220 is a function of the Stall Management Yaw Damper (SMYD) Computer logic. Above approximately 22,000ft, the FMC provides the minimum maneuver (buffet) speed to the autopilot, which is unaffected by a single DEU failure. Below 22,000ft, the autopilot uses the SMYD minimum maneuver speed, which is dependant on the DEU engine data. A failure of the DEU below 22,000ft prevents the autopilot from operating in pitch modes that control to airspeed or thrust.As stated above, the minimum maneuver airspeed is calculated by the SMYD computer. The buffet speed is calculated by the FMC. The SMYD computer compares the minimum maneuver airspeed with the buffet speed and transmits the higher of the two values to the FCC. At low altitudes, the minimum maneuver speed is the larger of the two. At high altitudes, the buffet speed is the larger of the two. The crossover point occurs at approximately 22,000 feet, depending on gross weight.FL220是失速管理偏航阻尼器(SMYD)计算机逻辑的功能。在大约22,000英尺以上,FMC为自动驾驶仪提供最小机动(抖振)速度,该速度不受单个DEU故障的影响。在22,000英尺以下,自动驾驶仪使用SMYD最小机动速度,这取决于DEU发动机数据。如果DEU在22,000英尺以下发生故障,自动驾驶仪将无法在控制空速或推力的俯仰模式下运行。如上所述,最小机动空速由SMYD计算机计算的。抖振速度由FMC计算。SMYD计算机将最小机动空速与冲击速度进行比较,并将两个值中的较高值发送给FCC。在低空,最小机动速度是两者中较大的。在高海拔地区,抖振速度是两者中较大的。交叉点大约在22,000英尺处,取决于总重量。
咨询波音的若干问题回复 问题1:在紧急下降检查单中要求双发油门杆减到最小或根据防冰情况按需调节,是否意味着在慢车位置不能打开发动机防冰活门?波音回复如下:RESPONSE:The intent of the step is to maintain adequate thrust to ensure the engine anti-ice valves are open. If the thrust is adequate, the COWL VALVE OPEN lights are illuminated dim and the amber TAI alert is not displayed. If the COWL VALVE OPEN lights remain illuminated bright with the engines at idle, the thrust should be increased slightly, up to a minimum of 30% N1. 这一步骤的目的是保持足够推力以确保发动机防冰活门打开,如果推力足够COWL VALVE OPEN灯是暗亮,琥珀色TAI不会显示,如果发动机在慢车时COWL VALVE OPEN灯保持明亮,推力应该缓慢增加直到最小30% N1。问题2为什么在人工恢复和飞行操纵卡阻受限检查单中不需要将TCAS模式设置 TA 或者TA only模式? 波音回复如下:RESPONSE:All non-normal checklists are evaluated on a case-by-case basis. There are no blanket criteria defining when the Transponder Mode selector must be set to TA because malfunctions are very situational. Putting the Transponder Mode selector to TA into all relevant checklists is not done because, depending on the extent of the malfunction and the conditions, there may be capability to accomplish an RA action. The probability of a severe malfunction, which limits climb capability and/or maneuverability, combined with a RA event are low enough that it does not warrant a TCAS-TA step in many checklists.所有非正常的检查表都是根据具体情况进行评估的。由于故障非常具有情境性,因此没有明确的标准来定义应答器模式选择器何时必须设置为TA。将应答器模式选择器放入所有相关的检查清单中是不可行的,因为根据故障的程度和条件,可能有能力完成RA操作。严重故障(限制爬升能力和/或机动性)与RA事件相结合的概率很低,因此在许多检查清单中不需要进行TCAS-TA步骤。问题3如果在低于飞行高度层 FL220 的爬升和下降过程中一个 DEU 失效且失效侧自动驾驶接通,• 两个飞行员飞行显示上的飞行指引仪俯仰指令杆消失• 在高度截获( ALT ACQ)时飞行指引仪俯仰指令杆重新出现• 自动驾驶接通于 CWS P 方式• 失效侧自动驾驶的高度层改变( LVL CHG), VNAV 与 V/S 不可用。如果 DEU 在飞行高度层 FL220 以上时失效,自动驾驶与飞行指引仪不受影响。为什么高度220是一个临界高度?波音回复如下:RESPONSE:FL220 is a function of the Stall Management Yaw Damper (SMYD) Computer logic. Above approximately 22,000ft, the FMC provides the minimum maneuver (buffet) speed to the autopilot, which is unaffected by a single DEU failure. Below 22,000ft, the autopilot uses the SMYD minimum maneuver speed, which is dependant on the DEU engine data. A failure of the DEU below 22,000ft prevents the autopilot from operating in pitch modes that control to airspeed or thrust.As stated above, the minimum maneuver airspeed is calculated by the SMYD computer. The buffet speed is calculated by the FMC. The SMYD computer compares the minimum maneuver airspeed with the buffet speed and transmits the higher of the two values to the FCC. At low altitudes, the minimum maneuver speed is the larger of the two. At high altitudes, the buffet speed is the larger of the two. The crossover point occurs at approximately 22,000 feet, depending on gross weight.FL220是失速管理偏航阻尼器(SMYD)计算机逻辑的功能。在大约22,000英尺以上,FMC为自动驾驶仪提供最小机动(抖振)速度,该速度不受单个DEU故障的影响。在22,000英尺以下,自动驾驶仪使用SMYD最小机动速度,这取决于DEU发动机数据。如果DEU在22,000英尺以下发生故障,自动驾驶仪将无法在控制空速或推力的俯仰模式下运行。如上所述,最小机动空速由SMYD计算机计算的。抖振速度由FMC计算。SMYD计算机将最小机动空速与冲击速度进行比较,并将两个值中的较高值发送给FCC。在低空,最小机动速度是两者中较大的。在高海拔地区,抖振速度是两者中较大的。交叉点大约在22,000英尺处,取决于总重量。 -
对检查单 “起飞后,起落架手柄不能提到收上位”的解释 提问人:曹际涛B737NG快速检查单第14章的 “起飞后, 起落架手柄不能提到收上位”,检查单给出三种可能原因:一、起落架手柄锁电磁线圈失效二、空/地系统失效,三、地面扰流板内锁活门不能关闭。在检查单第3步进行判断:“在襟翼完全收上且油门杆前推超出垂直位置后,座舱高度/形态警告间歇性喇叭保持静音且起飞形态( TAKEOFF CONFIG)灯不亮”则可以证明是 “起落架手柄锁电磁线圈失效” 如果“襟翼完全收上时, 座舱高度/形态警告间歇性喇叭响或起飞形态( TAKEOFF CONFIG)灯亮”那么就是第二种原因:空/地系统失效或者第三种原因:地面扰流板内锁活门不能关闭。 当油门杆对应的推力解算角TRA(Thrust Resolver Angle)超过53度时,起飞构型不正确则形态警告间歇性喇叭响,起飞形态( TAKEOFF CONFIG)灯亮。一般温度和低海拔机场地面TRA53度对应的发动机N1转速一般在63%左右,相同油门杆位置发动机转速会随外界环境变化而改变。(注意:TRA不是TLA (Thrust Level Angle),TLA是推力手柄角。)第一种原因比较好理解, 起落架手柄锁电磁线圈是防止飞机在地面时人为误收上起落架手柄而设计的一把电磁锁。正常情况当飞机到空中时电磁锁会自动开锁。如果电磁锁失效,在空中手柄就不能正常提到收上位,需要通过超控机械机构把手柄提到收上位。第二种原因“空/地系统失效”,即空地逻辑失效在地面方式。起落架手柄电磁锁因为空地逻辑在地面仍然处于锁住状态。这种原因驾驶舱还有很多其他现象。主要现象1、起飞后自动油门方式一直保持在 “THR HLD”方式,不会改变,如下图:而正常的现象是800英尺后自动油门方式从“THR HLD”会变成 “ARM”方式。自动油门在人工断开后不能再次接通,而正常起飞后自动油门人工断开后可以再次接通。正常情况下起飞方式结束后发动机推力方式从起飞推力方式“TO或者D-TO”变成 “CLB”方式,但空地逻辑失效在地面后发动机推力方式一直显示起飞推力方式。2、VNAV不能接通,即使在地面预位了VNAV ,空中接通自动驾驶时VNAV也会断开。LNAV在MCP板上可以接通,在方式信号牌上也显示绿色LNAV,但指引杆没有变化,自动驾驶接通后,也不执行LNAV轨迹。3 、起飞后CDU的起飞页面保持不变,而正常起飞后起飞页面变成生效的爬升页面,N1限制页保持地面方式页面不变,而正常情况空中变成如图页面:POS REF 2/3页会显示无线电位置,但空地逻辑失效在地面方式时不显示无线电位置。如图:按压CDU的 “INIT REF”键不显示进近参考页面,而是一直显示地面才有的性能初始页面。4、正常情况下起飞离地后速度带上V1,VR游标会消失,但空地逻辑失效在地面方式飞机离地后速度带上仍然显示V1,VR游标。如图:速度带底端没有黄色最小机动速度杆和红黑相间的抖杆速度带。以上现象,再结合“襟翼完全收上时,形态警告间歇性喇叭响或起飞形态( TAKEOFF CONFIG)灯亮”即可证明是空地逻辑失效在地面方式。形态警告间歇性喇叭声音很是干扰通讯、飞行员交流。在判明故障后建议把襟翼放出到1即可消除这个警告声音,然后按照程序就近着陆。现在分析第三种故障原因:“地面扰流板内锁活门不能关闭”。先分析扰流板系统原理简图.(如下图)从系统简图来看地面扰流板的放出取决于两个活门:地面扰流板控制活门和地面扰流板联锁活门(即检查单的内锁活门)。扰流板手柄拉出后通过机械钢索打开地面扰流板控制活门,飞机在地面时右主起落架减震支柱压缩带动弹簧钢索推开地面扰流板联锁活门,这样A系统的液压就会进入管路到1,6,7,12号地面扰流板的作动筒内升起地面扰流板.当飞机在空中后,右侧主起落架减震支柱的伸出会带动地面扰流板内锁活门回到关闭位,这样可以保证地面扰流板在空中不会放出.如果因某种机械原因导致地面扰流板内锁活门不能关闭,当飞机在空中需要减速时,一旦拉出扰流板手柄,不仅飞行扰流板会放出,地面扰流板也会放出 ,这样会造成飞机急剧下降,甚至有撞地风险。地面扰流板内锁活门不能关闭,在驾驶舱并没有专门的灯光或者声音警告,只是检查单里提到的:“起飞后起落架手柄不能提到收上位, 在襟翼完全收上且油门杆前推超出垂直位置后,会有形态警告间歇性喇叭响或起飞形态( TAKEOFF CONFIG)灯亮”。现在就有个疑问:为什么地面扰流板内锁活门不能关闭,导致起落架手柄不能提到收上位呢? 我是这么分析的:起落架手柄不能提到收上位,那么起落架就收不上,起落架放出状态阻力效应还是很明显的,飞机速度不会太大,那么扰流板就不可能用得上,就不会拉出扰流板手柄,地面扰流板就不会在空中放出。这种关联设计体现出波音的“良苦用心”, 以上是我对这种设计的分析,不敢说是真理,但不会是谬误.根据737-800飞机SSM( SYSTEM SCHEMATIC MANUAL)维护手册电路分析第三种故障,除了起飞后起落架手柄不能提到收上位、襟翼收上后出现形态警告间歇性喇叭响、起飞形态( TAKEOFF CONFIG)灯亮之外并不会出现其他不正常现象和警告,CDU和自动油门,指引杆等都是正常可以使用的,这也是区别于第二种故障的地方。要消除间歇性喇叭响,也可以把襟翼放到1即可。值得一提的是737MAX飞机的检查单“起飞后,起落架手柄不能提到收上位” 已经没有第三种原因了,这是因为B737MAX飞机扰流板系统变成了电传方式,不再是机械液压式控制。B737NG检查单没有再进一步判断到底是第二种还是第三种故障,就是要求“计划在最近的合适机场着陆”。根据737-800SSM维护手册分析襟翼在收上状态时如果是第三种故障在检查单第7步拔出跳开关( P6-3:C18)后就会消除形态警告间歇性喇叭响。如果是第二种故障拔出该跳开关,间歇性喇叭也不会停止。检查单强调不要预位扰流板,不要使用自动刹车,落地后立即人工放出扰流板,人工刹车。这些措施都是对第二和第三种故障的共同考虑。最后补充点模拟机方面的情况,山航目前B737-800模拟机都是加拿大CAE公司的CAE7000系列。模拟机后台可以设置第一种“起落架手柄锁电磁线圈失效”故障,第二种“空/地系统失效”故障,不能设置第三种“地面扰流板内锁活门不能关闭”故障。空地逻辑失效在地面方式“彩蛋”补充:除了737-800FCOM手册第14章起落架章节列出的一些系统和部件对应的空、地逻辑的不同现象,另外再补充一些空地逻辑失效在地面方式时飞机起飞离地后的隐蔽现象:1、可以测试GPWS系统。2、失速测试时不抖杆,但自动驾驶会断开。3、马赫空速测试没反应。4、TCAS在飞机离地后出现TCAS FAIL。5、速度基准选择旋钮调到VREF位置后PFD上显示“INVALID ENTRY”。6、发动机反推在空中可以放出。7、爬升过程客舱有增压,但不正常,内外有3PSI左右的压差,飞机持续爬升,最终客舱高度会超过10000英尺。培训部飞行培训中心 王勇
-
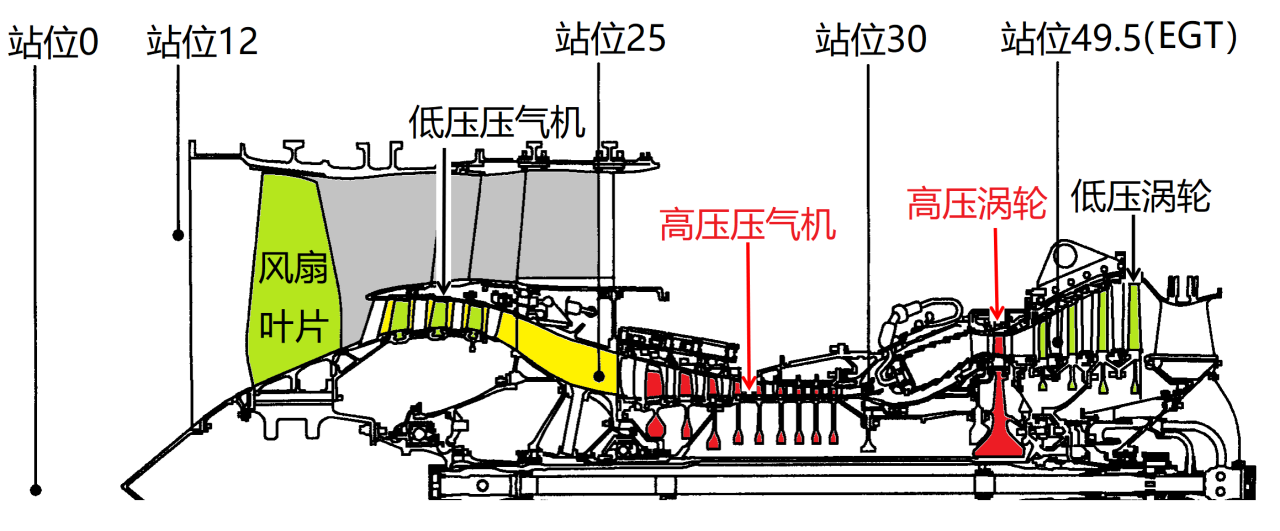
CFM56-7B发动机EGT超限原因及处置方法是什么? 提问人:徐岩一.EGT显示发动机何处的排气温度?EGT是英文Exhaust Gas Temperature的缩写,在这里指发动机排气温度。发动机在运转过程中,其不同部位的温差巨大。比如在巡航过程中,外界气温可低至-50℃,空气进入发动机经过两级压气机的压缩后温度逐渐升高,在高压压气机后部可达450℃。在燃烧室内,充分燃烧的油气温度更高达1700℃。随着能量转换,气流在经过高压涡轮和低压涡轮时,温度逐渐降低。在发动机尾喷口,气流温度仍可达数百摄氏度。那么,显示在驾驶舱通用显示系统(CDS)上的EGT是发动机哪个部位的气温呢?CFM56-7B发动机是双转子轴流式涡轮风扇发动机,其N1和N2转子是同心轴。方便起见,沿着发动机的纵轴中心线,从前到后,定义了5个空气动力站位。在这些站位上安装有探头或者传感器,用以探测所需的相关参数,如图1所示:例如在发动机进气道风扇之前,站位12处安装有被称为T12 的温度传感器。T12 温度传感器探测到的数据被发送给发动机电子控制器(EEC),用于计算推力等。而在站位49.5处(T49.5),即N1转子上四级低压涡轮中的第一级和第二级低压涡轮之间,安装有8个热电偶,每2个热电偶通过接线盒连结成电缆组件。这样,共有4根T49.5热电偶电缆组件。4根电缆组件将8个热电偶探测到的数据提供给EEC。EEC取8个数值的平均数,作为最终的发动机排气温度EGT,传送给显示电子组件(DEU),并最终显示在CDS上。如图2所示。综上所述,发动机EGT显示的是低压涡轮第一级和第二级涡轮之间的温度。二.为什么要防止发动机EGT超限 首先,发动机的高压涡轮和低压涡轮是高速旋转的受力部件,受材料本身的限制,在高温环境下承受热应力的时候,其发生裂纹等损坏的概率随着温度的升高而增加。其次,处在高温环境下,会使得涡轮的使用寿命缩减,温度越高,其缩减越明显。这也直接影响了发动机的使用寿命。三.CFM56-7B发动机EGT超限情况简介CFM56-7B发动机存在两种EGT超限的情况,分别是在发动机起动过程中的超过起动极限725℃和发动机起动后在工作过程中的超过最大限制950℃。如图3所示。那么,发动机EGT为什么会超限呢?为了说明这个问题,首先介绍一下液压机械组件(HMU)中燃油计量活门(FMV)的作用。在执行正常的发动机地面起动程序中,当满足N1转速出现和N2转速达到25%(或5 秒钟内,N2加速少于1%且N2不低于20%)这两个条件时,应该将发动机起动手柄从切断(CUTOFF)位提到慢车(IDLE)卡位,这会导致以下情况发生:1、直接打开翼梁燃油关断活门;2、给EEC发出信号,使发动机燃油关断活门(电控液动式)的电磁线圈断电以备打开;3、起动点火系统。在此需要强调的是,提起起动手柄同时使得EEC给HMU发送控制信号以打开HMU中的燃油计量活门(FMV)。因为从燃油总管上游来的燃油量是富裕的,超过了维持发动机转速所需要的量,所以EEC根据油门杆的位置控制燃油计量活门(FMV)的开度,以满足发动机功率所需燃油量,而多余的燃油则会流过HMU内的旁通活门用以其它功能的使用,并最终循环回燃油总管上游。流过燃油计量活门(FMV)的燃油进一步打开(通过压力顶开)发动机燃油关断活门,并经燃油流量传感器进入燃烧室。所以,控制进入发动机燃烧室所需燃油量的核心部件是EEC,而直接的机械装置则是HMU中的燃油计量活门(FMV),同时,旁通活门的开度也会影响流经燃油计量活门(FMV)的燃油量。综上所述,燃油计量活门(FMV)打开的越大,流经的燃油量越多,燃烧室内的燃烧便更加剧烈,其温度也越高,相应的EGT也就越高,从而导致EGT超限。那么,有哪些原因会导致燃油计量活门(FMV)打开更大(燃油量供给过多)呢?简单总结如下:1、燃油计量活门(FMV)失效在打开位。2013年9月26日,国内一架从南京飞往昆明的B737-800客机在8400米高空巡航过程中,因右侧发动机的燃油计量活门(FMV)失效在打开位,使得燃油流量异常上升,导致N1、N2和EGT超限(950℃)的事件发生,机组最终关闭故障的发动机并成功备降长沙黄花机场。2、发动机失速或喘振。发动机失速是指流经发动机压气机叶片的气流发生分离,导致气流不稳定,这与飞机的失速在原理上是相同的。多个叶片上的失速会造成发动机的喘振以及振动指数增加,进一步导致发动机N1和N2转速减小。EEC为增大发动机转速,会指令燃油计量活门(FMV)打开更大,这样更多的燃油进入燃烧室,从而导致EGT超限的风险。3、发动机压气机故障。压气机内部出现外来物堆积、压气机叶片故障等原因造成N1和N2转速减小,导致燃油计量活门(FMV)打开更大。4、HMU相关设备故障。除了燃油计量活门(FMV),HMU还可以控制可调静子叶片(VSV)、可调放气活门(VBV)等设备,用以提高发动机压气机的工作效率。当这些设备故障时,可能造成N1和N2转速减小,进而导致燃油计量活门(FMV)打开更大。5、发动机滑油系统出现问题。发动机滑油的主要作用是冷却、润滑、密封和清洁。当滑油内杂质过多,导致其润滑效果降低时,发动机效率亦会降低,从而导致燃油供给增加,直至EGT超限。当然,温度传感器出现故障也可能导致EGT超限。2022年10月,某航一架B737NG飞机(CFM56-7B发动机)在空中报告左侧发动机EGT达892℃,接近红线950℃,比右发EGT高60℃,原因是四条T49.5热电偶电缆组件中的一条电缆组件上的温度传感器出现了故障。所幸EGT并没有超温,航班后续正常落地,更换了故障的温度传感器之后EGT指示恢复正常。四.CFM56-7B发动机EGT超限的处置方法如上文所述,发动机EGT超限主要是超过起动极限725℃和工作极限950℃。针对上述两种超限的处置方法,在《B737NG机组标准操作程序(SOP)》和《B737快速检查单(QRH)》中有详细的说明。首先,针对于在地面起动过程中的超过起动极限725℃,标准操作程序要求机组在起动发动机过程中严密监视发动机各项参数,当出现“EGT迅速接近或超过起动极限”时,机组应执行“发动机中止起动”检查单(如图4)。同时,在地面起动过程中,EEC 监测发动机参数以探测即将发生的热起动、发动机失速、超过EGT起动限制和湿起动的情况,当出现 EGT 快速增高或 EGT 接近起动限制时,EEC会关闭发动机的点火和供油。其次,对于发动机起动后或飞行中的EGT超限,机组可执行“发动机限制或喘振或失速”快速检查单(如图5)。对SOP提到的两种热起动分析如下:1、SOP中提到:不要过早地将发动机起动手柄放到 IDLE 卡位,否则可能出现热起动。简析:提手柄的时机需满足N1转速出现和N2转速达到25%两条件。当过早地提起起动手柄时,会使得发动机提前供油,此时N1和N2转速较低,进入燃烧室的气体也相对较少,造成燃烧的富油现象,导致燃烧室内温度较高。由于发动机转速较低,高压涡轮和低压涡轮将内能转化为机械能的效率较低,导致传感器探测到的EGT温度较高,以致于可能出现超过起动红线(725℃)的情况发生,从而出现热起动。当然,在地面起动期间,EEC感应到有可能导致热起动或发动机失速的条件时,会自动切断燃油供给,实现发动机关车。2、SOP中列出:起动机脱开 RPM 之前如果发动机起动电门不能保持在 GRD 位,可能导致热起动。简析:在发动机起动过程中,起动机脱开的时机是N2达到55%转速(SOP要求在56%N2时核对检查脱开)。此时,DEU断开发动机起动电门电磁线圈的电源,起动电门从GRD位跳到OFF(或AUTO)位,起动活门关闭,接下来发动机依靠自身动力转换进行运转。在发动机起动过程的初始阶段,起动机通过一系列机械连接,对N2轴有个带速的阶段。当发动机供油进行燃烧之后,其涡轮开始将燃烧室出来的内能(热能)转化为机械能,以使得N1和N2轴转动。如果在起动机脱开RPM之前,起动电门回到OFF或AUTO位,尤其是在发动机转速较低的情况下,起动机将不能继续对N2轴进行带速,而此时的燃油流量还处于继续增加的状态,从而导致富油状况的发生,进而可能导致热起动。发动机EGT超限与发动机故障、环境因素、维护保养及操作方法都有着一定的关系。按照手册维护、使用操作发动机是防止EGT超限的重要举措。参考资料:《B737-700/800飞行机组使用手册》《B737机组标准操作手册》《B737-700/800快速检查单》《B737-700/800飞机维护手册》 作者:李军涛 培训部飞行培训中心本文已发表在《航空安全》2023年第4期,现有改动。
-
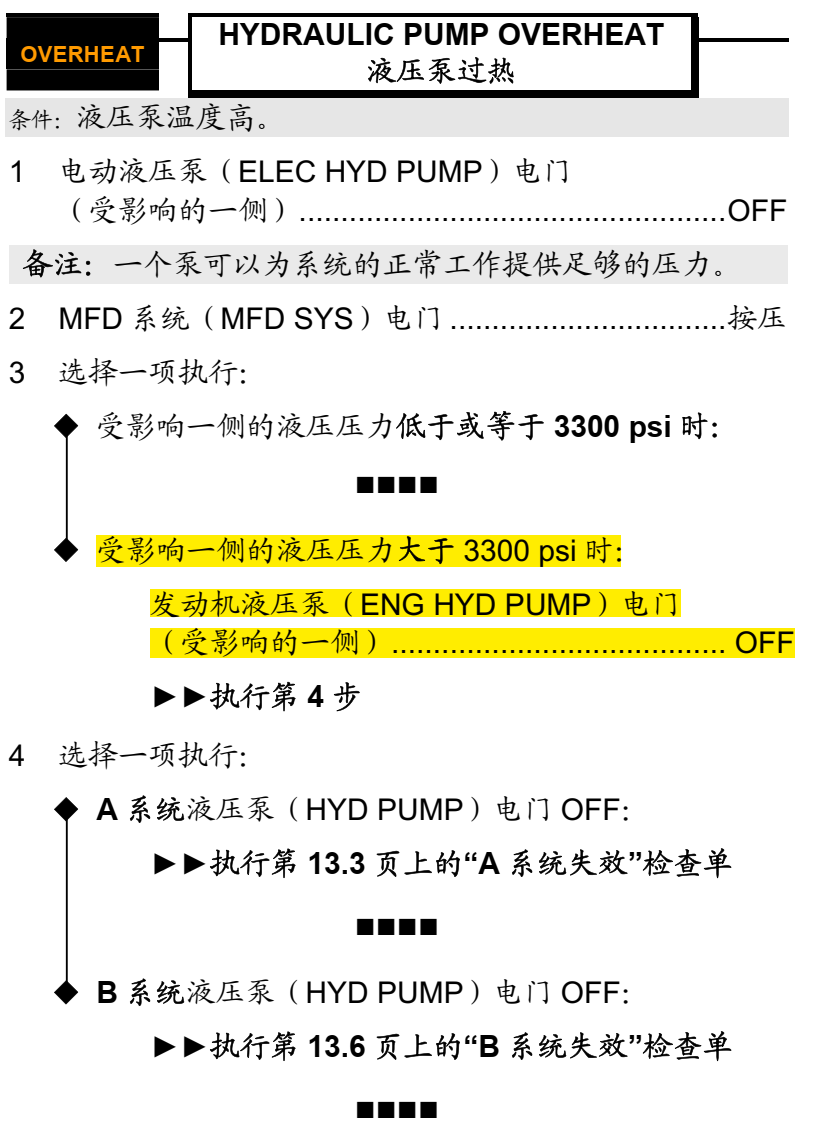
咨询Boeing有关737垂直CG和液压泵过热检查单的相关问题 问题一:CG的垂直位置在哪里?它在发动机和机翼的交界处吗?对于一架在地面的空飞机,CG的垂直位置的高度是多少? RESPONSE:Vertical centers of gravity are not typically tracked in operation as it is difficult to measure them in the first place and then to track them over the life of the airplane. Airplane longitudinal CG is determined at a regular weighing based on the airplane being leveled longitudinally. Lateral CG can be determined at the same time but requires the airplane to be leveled laterally and that is not a requirement and usually isn’t done. To measure vertical CG, one needs to place the airplane weigh scales at different – and KNOWN – vertical locations, and the logistics to put the airplane into such a configuration are very involved such that no one does it. Operationally, knowing the lateral and vertical CG is basically informational and not otherwise useful for daily operations. When Boeing does the initial aircraft design and certification analysis, we determine the CG in all 3 dimensions. But since the lateral and vertical CGs aren’t measured or tracked in operations, any limitations that might be affected by changes in the lateral and/or vertical CG are “translated” into something else. For lateral, that is usually to limit the weight difference between the left and right sides of the airplane. The true airplane CG isn’t at 0.0 left/right but it’s not far off from that, and by limiting the weight difference left/right, we ensure the operational airplane CG stays close to the analyzed value. Vertical CG is not traditionally a driver of limitations as the design teams typically consider the range of possible vertical CGs for a given airplane configuration during the design stage. And since this range usually covers all vertical CGs that an operator could configure the airplane for, the operator wouldn’t see a vertical CG that wasn’t considered during the design phase. The aircraft rotates about its 3-dimensional center of gravity during flight. That center of gravity moves depending on how the aircraft is loaded. So from a flight rotation perspective, the 3 axes cross at the aircraft center of gravity. But all of the weight and balance paperwork calculates the aircraft center of gravity relative to a different scale. The (x, y, z) = (0, 0, 0) point on that scale is typically forward of the nose (x), along the aircraft centerline (y), and about 200 inches below the main deck floor location (z). If attachments are referred to and are not present, please access them by logging into the Boeing Communication System on MyBoeingFleet or contact your Boeing Field Service Representative. Sincerely,Ingrid M. Wakefield, Flight Operations SupportRyan Vas, ManagerCustomer SupportThe Boeing CompanyBCA Operations Centers 24 Hour Contact Numbers787: +1 (206) 544-7787All Other Models: +1 (206) 544-7500 Link to the Boeing Communication System: https://boeinginservice.my.site.com/a2F6g0000012z5AEAQ(Note: MyBoeingFleet portal login is required to access link in the Boeing Communication System)垂直重心在飞机的运行中通常不会被测量追踪,因为它的测量本身颇具挑战性,而且在整个飞机使用寿命中对其进行监控也极为困难。飞机纵轴上的重心是要求飞机在纵向水平上保持水平,通过定期称重来确定。横轴上的重心也可以同时确定,但这需要飞机在横向上达到水平状态,而这并非强制性要求,通常也不会这样做。若要测量垂直重心,必须将飞机的称重设备置于不同的、且确切已知的垂直位置上,然而,将飞机调整到这种特定的构型中涉及的物流过程极为复杂,以至于几乎无人实施。从操作的角度来看,了解横向和垂直重心的信息性大于实际应用,对飞机的日常运作并无直接影响。在波音进行飞机的初始设计和认证分析时,我们确实会计算三个维度上的重心。然而,鉴于在飞机的实际运营中并不对横向和垂直重心进行测量或跟踪,任何可能受到这些重心变化影响的限制条件都会被转化为其他形式。如:对于横向重心,这通常体现为对飞机左右两侧重量差异的限制。实际上,飞机的真实重心并不恰好位于左/右0.0的位置,但相差不远,通过控制左右两侧的重量差异,我们可以确保飞机在实际运营中的重心保持在分析预测的范围内。垂直重心一般不会成为设计限制的主要因素,因为在设计阶段,设计团队通常会考虑到特定飞机构型可能出现的垂直重心范围。由于这一范围已经覆盖了运营人可能为飞机设定的所有垂直重心位置,因此,运营人在实际操作中不会遇到设计阶段未曾考虑的垂直重心情况。飞机在飞行过程中会围绕其三维重心进行旋转。这个重心的位置会随着飞机装载状态的变化而移动。因此,从飞行旋转的角度来看,这三个轴在飞机重心处交汇。然而,所有的重量和平衡计算都是相对于一个特定的刻度进行的,这个刻度的原点(x, y, z) = (0, 0, 0)通常位于机头前方(沿x轴),飞机中心线(沿y轴),以及大约在主舱地板以下200英寸(沿z轴)的位置。问题二:In the hydraulic pump overheat checklist, why we use 3300psi of hydraulic pressure to decide whether we need to put the ENG HYD PUMP switch off, and what is the reasoning behind this?液压泵过热检查单中为什么液压泵过热要以压力3300PSI为界限判断?提问人:盛磊RESPONSE:Hydraulic system thermal analyses for 737 MAX certification identified an engine driven pump failure mode that may result in surface temperatures in excess of 450F in flammable fluid leakage zones. The hydraulic pumps used in the 737 hydraulic systems are variable displacement, pressure compensated pumps. Internal failures of the pump displacement control mechanisms (such as a jammed compensator spool, or jammed stroking piston) may result in the pump becoming 'stuck' at any level of volumetric displacement between zero and full flow. If the pump becomes stuck producing more flow than required by the user systems, the hydraulic system pressure will rise until the hydraulic system pressure relief valve is activated. The relief valve prevents excessive pressures but heat is generated by the extra flow bleeding off in the return circuit. The degree to which the hydraulic system is heated depends on the sustained flow rate through the relief valve. Surface temperatures of equipment in flammable fluid leakage zones must remain below 450F to support compliance with 14 CFR / CS 25.863 for 737 MAX certification. The HYDRAULIC PUMP OVERHEAT checklist mitigates the risk of exceeding the surface temperature limit in the in flammable fluid leakage zones by turning off the affected ENG HYD PUMP switch when the affected system hydraulic pressure is greater than 3300 psi. If attachments are referred to and are not present, please access them by logging into the Boeing Communication System on MyBoeingFleet or contact your Boeing Field Service Representative. Sarah Parsley, Flight Operations SupportRyan Vas, ManagerCustomer SupportThe Boeing CompanyBCA Operations Centers 24 Hour Contact Numbers787: +1 (206) 544-7787All Other Models: +1 (206) 544-7500回复:737 MAX 审定的液压系统热分析发现,发动机驱动泵故障模式可能导致易燃液体泄漏区域的表面温度超过450F。737液压系统中使用的液压泵是排量可变、压力补偿泵。泵排量控制机构的内部故障(如堵塞的补偿器阀芯,或堵塞的冲程活塞)可能导致泵在零和全流量之间的任何体积排量水平上“卡住”。如果泵卡住产生的流量超过用户系统所需的流量,液压系统压力将上升,直到液压系统释压活门工作。释压活门防止压力过大,但热量是由回路中多余的流量流出产生的。液压系统被加热的程度取决于通过释压活门的持续流量。 易燃液体泄漏区域的设备表面温度必须保持在 450F 以下,以支持符合 14 CFR / CS 25.863 的 737 MAX 审定。当受影响的系统液压压力大于 3300 psi 时,液 压泵过热检查单通过关闭受影响的发动机液压(ENG HYD)泵电门,降低了在可燃液体泄漏区域超过表面温度限制的风险。
-
B737NG水平尾翼是如何工作的? 提问人:郑阳B737NG飞机俯仰状态的控制机构由平尾部分的升降舵和水平安定面组成,在推拉驾驶杆操纵时,升降舵可以快速偏转角度产生明显的俯仰力矩效应,升降舵可以说是改变俯仰姿态的“猛药”。水平安定面虽然面积较大,但移动较慢,改变俯仰姿态较缓,是改变俯仰姿态的“慢药”。使用安定面低头配平时,安定面的前端向上移动,安定面的后端向下移动;抬头配平时,安定面的前端向下移动,安定面的后端向上移动,这样看来安定面后端具有升降舵的效用,后端可以看成升降舵的“外延”。当安定面配平到合适位置,升降舵基本可以保持“中立”就能达到稳定的俯仰姿态。所以安定面对于减轻驾驶杆力和稳定俯仰状态有“四两拨千斤”功效。升降舵除了人工和自动驾驶操纵以外,还有一种情况就是当飞机在马赫数大于0.615时,机翼的升力中心后移产生低头力矩,计算机FCC会发出马赫配平指令给马赫配平作动筒驱动升降舵轻微上偏抵消升力中心后移的低头效应。 在升降舵的后缘有一块调整片,如图:该调整片的工作原理是:当襟翼放出时调整片和升降舵同方向移动,升降舵每移动一度,调整片移动 0.50度;襟翼收上时调整片与升降舵成反方向移动,升降舵每移动一度,调整片移动 0.75度。在襟翼放出时飞机速度一般较低,空气效能较弱,且襟翼放出时俯仰状态改变较慢,所以调整片和升降舵同方向移动增加升降舵的俯仰效能,襟翼收上时空速一般较大,空气效能较强,调整片反方向移动减弱升降舵效能,以起到平衡调节功效。所以调整片对于升降舵有加减法的作用。 当向后拉驾驶杆抬头时,按压主电配平电门到NOSE DN位,安定面不会移动;前推驾驶杆低头时,按压主电配平电门到NOSE UP位,安定面不会移动,或者说在安定面配平时反向移动驾驶杆安定面的配平会停止,这是因为升降舵是控制俯仰的主要机构,安定面是控制俯仰的辅助机构,辅助机构必须要配合主要机构的工作,也就是说安定面要做到和升降舵“步调”一致。在驾驶杆中立位置时不管主电配平还是自动驾驶配平(包括速度配平)安定面配平可以前后自由移动。驾驶杆中立位置是一个角度范围。如图: 主电配平的驾驶杆中立位置是从向前2.8度到向后3.7度,自动驾驶配平(包括速度配平)的驾驶杆中立位置是从向前3.3度到向后5.5度。驾驶杆的前推极限是13.75度,后拉极限是14.75度。当安定面正在配平时如果驾驶杆超出了上面的角度范围,相应的反向配平就会中止。其中原因是每个驾驶杆底部都有一个驾驶杆切断电门,如图:驾驶杆切断电门会切断安定面反向配平指令电路。驾驶盘上的2块主电配平电门的设计也是非常有深意,如图:无论机长侧还是副驾驶侧驾驶盘上的配平电门,它的左半侧电门不管向上还是向下打都可以接通安定面配平电动马达的电源,在中立位置时电源中断。右半侧电门是发出抬头和低头配平指令的,在中立位置无指令。平时为操作方便左右侧2块电门一起同方向使用。既然为方便使用而同方向操作,为什么不设计成一块呢?除了B737的安定面配平电门是左右2半,其他机型如B747,B757,B767等都是左右2半,副翼配平电门也是2块,但方向舵配平却是一个旋钮,答案呼之欲出了,2个安定面配平电门对应2块水平安定面,2个副翼配平电门对应2块副翼,1个粗壮的方向舵配平电门对应1个方向舵,这是波音的设计文化啊。在起飞或者复飞时常会因为升降舵操纵幅度较大导致爬升的俯仰姿态偏大,计算机FCC就会启动速度配平功能对安定面进行低头配平,使得姿态减小一点,从而速度增大一点,让推力,姿态,速度三者达到一个完美匹配的“三角形”。速度配平结束后飞机处于稳定状态,即使飞行员将手从驾驶杆上拿开,飞机的空速也是稳定的。在进近时飞机稳定在下滑道上,飞机的姿态,速度,推力都相对固定,是一个稳定的“三角形”,要让姿态稳定,安定面配平需要在适当位置以保持驾驶杆“轻松”状态。培训部飞行培训中心 王勇