搜索到
126
篇与
的结果
-
 关于货舱灭火时间的解释 提问人:苏占邦目前波音737NG机队货舱灭火时间有两种构型。根据前翼梁空调混合舱里灭火瓶的数量,灭火时长分75分钟和195分钟。如果装有一个灭火瓶,系统可提供总共75分钟的灭火抑制,包括飞抵机场着陆的60分钟飞行时间和复飞、着陆及下客的15分钟。如果装有两个灭火瓶,在第一个瓶释放后,第二个灭火瓶会以减少的流量释放,系统共计195分钟灭火时间,包括着陆到机场的180分钟,加上额外的15分钟灭火时间,以备复飞、着陆和下客。与NG不同的是,MAX安装有两个海伦灭火器,一个25磅的高释放率(HRD)灭火器,一个13磅低释放率(LRD)灭火器。高释放率灭火器释放计时15分钟后释放低释放率灭火器,总计75分钟灭火,支持60分钟改航和15分钟备用。那我们不禁会问,这些构型有什么区别?本文将带着这一疑问,来探讨货舱的灭火时间。在活塞发动机为王的时代,鉴于活塞发动机的停车率,国际民航管理机构制定了“60分钟”限制规则:不允许双发飞机在航线上任意一点到中途备降场单发飞行时间超过60分钟的航线上运行。而后,随着涡轮发动机的普及,60分钟规则限制了航线的拓展。双发延程运行(ETOPS)规则的出现,让双发飞机的航线有了更多的选择。ETOPS(Extended-range Twin-engine Operational Performance Standards),即双发延程运行标准,是现代航空业中一项至关重要的技术规范。它允许双发飞机在单发失效的情况下,继续飞行至最近的备降机场且时间超过60分钟,从而扩展了双发飞机的航程和运营范围。ETOPS的引入不仅改变了航空公司的航线规划方式,也推动了航空技术的进步。对于双发飞机,FAA有三种方法验证飞机满足延程运行(ETOPS)适航要求,分别是“服役经历法”、“早期ETOPS方法”和“服役经历和早期ETOPS相结合的方法”。“服役经历法”是对候选飞机设计和服役经历进行评估,以确定飞机的ETOPS能力,比如至少累积25万发动机小时。主要评估内容包括该机型世界机队经验的累计、空中停车率、推进系统、飞机系统评估、飞机飞行试验。“早期ETOPS方法”是通过提出比正常颁发型号合格证更严格的分析和试验要求,来验证飞机具备ETOPS能力。该方法允许对一架全新的飞机进行ETOPS批准。“服役经历和早期ETOPS相结合的方法”采用15万小时世界机队发动机小时数来替代“早期ETOPS方法”中所要求的飞机演示试验,其他要求按照“早期ETOPS方法”进行。在ETOPS型号合格适航批准中,飞机系统评估要求飞机有时间限制的系统必须满足ETOPS的时间限制。C级货舱适航要求货舱空舱构型下,当货舱出现火情时,切断货舱通风,灭火剂喷射后整个货舱内灭火剂应迅速达到至少5%的体积浓度来熄灭货舱内的火焰,并持续保持最小3%体积浓度来抑制货舱内的火焰直到飞机安全着陆。也就是说,C级货舱灭火时间必须满足备降的最大时长,即满足ETOPS的认证需要。货舱具有195分钟的灭火时间的机型正是为满足型号审定ETOPS180分钟运行而设计的灭火能力。对于波音737机队,无论是NG还是MAX,均取得了ETOPS型号认证,只不过目前我们公司无需ETOPS运行,在选型时不用刻意区分ETOPS构型,目前公司737MAX的75分钟构型足矣。对于双灭火瓶构型,灭火系统包含高速灭火瓶和低速灭火瓶。当货舱发生火情时,驾驶舱货舱火警面板相对应的货舱火警灯点亮、火警铃响起,驾驶员通过按压对应的预位电门和释放电门,可以快速释放高速灭火瓶,使货舱内灭火剂体积浓度迅速达到5%,以熄灭货舱中的着火。低速灭火瓶通过调节器缓慢释放,以维持货舱内灭火剂体系浓度保持3%以上,以便抑制火情进一步恶化,直到飞机落地。如果低速灭火瓶还没有释放而飞机已经落地,则该瓶的释放将会被抑制。 培训部飞行培训中心 崔新新
关于货舱灭火时间的解释 提问人:苏占邦目前波音737NG机队货舱灭火时间有两种构型。根据前翼梁空调混合舱里灭火瓶的数量,灭火时长分75分钟和195分钟。如果装有一个灭火瓶,系统可提供总共75分钟的灭火抑制,包括飞抵机场着陆的60分钟飞行时间和复飞、着陆及下客的15分钟。如果装有两个灭火瓶,在第一个瓶释放后,第二个灭火瓶会以减少的流量释放,系统共计195分钟灭火时间,包括着陆到机场的180分钟,加上额外的15分钟灭火时间,以备复飞、着陆和下客。与NG不同的是,MAX安装有两个海伦灭火器,一个25磅的高释放率(HRD)灭火器,一个13磅低释放率(LRD)灭火器。高释放率灭火器释放计时15分钟后释放低释放率灭火器,总计75分钟灭火,支持60分钟改航和15分钟备用。那我们不禁会问,这些构型有什么区别?本文将带着这一疑问,来探讨货舱的灭火时间。在活塞发动机为王的时代,鉴于活塞发动机的停车率,国际民航管理机构制定了“60分钟”限制规则:不允许双发飞机在航线上任意一点到中途备降场单发飞行时间超过60分钟的航线上运行。而后,随着涡轮发动机的普及,60分钟规则限制了航线的拓展。双发延程运行(ETOPS)规则的出现,让双发飞机的航线有了更多的选择。ETOPS(Extended-range Twin-engine Operational Performance Standards),即双发延程运行标准,是现代航空业中一项至关重要的技术规范。它允许双发飞机在单发失效的情况下,继续飞行至最近的备降机场且时间超过60分钟,从而扩展了双发飞机的航程和运营范围。ETOPS的引入不仅改变了航空公司的航线规划方式,也推动了航空技术的进步。对于双发飞机,FAA有三种方法验证飞机满足延程运行(ETOPS)适航要求,分别是“服役经历法”、“早期ETOPS方法”和“服役经历和早期ETOPS相结合的方法”。“服役经历法”是对候选飞机设计和服役经历进行评估,以确定飞机的ETOPS能力,比如至少累积25万发动机小时。主要评估内容包括该机型世界机队经验的累计、空中停车率、推进系统、飞机系统评估、飞机飞行试验。“早期ETOPS方法”是通过提出比正常颁发型号合格证更严格的分析和试验要求,来验证飞机具备ETOPS能力。该方法允许对一架全新的飞机进行ETOPS批准。“服役经历和早期ETOPS相结合的方法”采用15万小时世界机队发动机小时数来替代“早期ETOPS方法”中所要求的飞机演示试验,其他要求按照“早期ETOPS方法”进行。在ETOPS型号合格适航批准中,飞机系统评估要求飞机有时间限制的系统必须满足ETOPS的时间限制。C级货舱适航要求货舱空舱构型下,当货舱出现火情时,切断货舱通风,灭火剂喷射后整个货舱内灭火剂应迅速达到至少5%的体积浓度来熄灭货舱内的火焰,并持续保持最小3%体积浓度来抑制货舱内的火焰直到飞机安全着陆。也就是说,C级货舱灭火时间必须满足备降的最大时长,即满足ETOPS的认证需要。货舱具有195分钟的灭火时间的机型正是为满足型号审定ETOPS180分钟运行而设计的灭火能力。对于波音737机队,无论是NG还是MAX,均取得了ETOPS型号认证,只不过目前我们公司无需ETOPS运行,在选型时不用刻意区分ETOPS构型,目前公司737MAX的75分钟构型足矣。对于双灭火瓶构型,灭火系统包含高速灭火瓶和低速灭火瓶。当货舱发生火情时,驾驶舱货舱火警面板相对应的货舱火警灯点亮、火警铃响起,驾驶员通过按压对应的预位电门和释放电门,可以快速释放高速灭火瓶,使货舱内灭火剂体积浓度迅速达到5%,以熄灭货舱中的着火。低速灭火瓶通过调节器缓慢释放,以维持货舱内灭火剂体系浓度保持3%以上,以便抑制火情进一步恶化,直到飞机落地。如果低速灭火瓶还没有释放而飞机已经落地,则该瓶的释放将会被抑制。 培训部飞行培训中心 崔新新 -
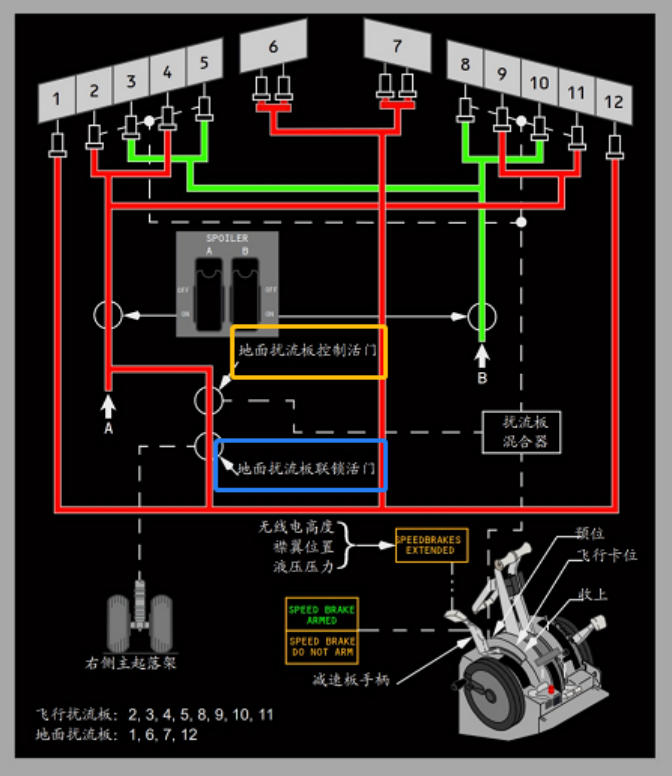
关于起飞形态警告关联知识的思考 起飞形态警告中第四、五条有什么区别?提问人:李文豪一、背景案例2025年1月25日,公司B737-800飞机执行曼谷-青岛航班,在起飞滑跑过程中触发起飞形态警告,机组实施中断起飞程序,构成一起机械原因的不安全事件。查看事件调查报告可以了解到:1.译码显示起飞前起飞形态设置正确,机组执行起飞前检查单“减速板..按压,下卡位”;2.起飞滑跑过程中,在速度76.25节时出现起飞形态警告,机组中断起飞;3.飞机滑回后,机务查看接近电门电子组件(PSEU)自检报告有“NOT SBRK HDL DOWN”故障代码,系统认为减速板手柄不在DOWN位,经综合判断故障为减速板起飞警告电门间歇性故障。2024年至此次事件,公司已经发生6起因减速板起飞警告系统故障造成的中断起飞事件,即显示“NOT SBRK HDL DOWN”代码。二、工作原理从上述报告内容中我们可以识别出几个关键词:起飞形态警告、PSEU、起飞警告电门,三者有何联系呢?下面将结合《机组使用手册》FCOM和《机务维修手册》SDS分析起飞形态警告系统的工作原理。(一)PSEU是飞机空/地系统的主要部件。起落架压缩时的传感器信号被传递到PSEU,PSEU监控此信号,并通过操纵空/地继电器将空/地离散信号传递给相关系统使用。此外,PSEU还具有以下功能: — 起落架位置指示和警告 — 起落架转换活门控制 — 起落架未放下警告 — 减速板伸出琥珀色灯控制 — 起飞形态警告 — 舱门警告FCOM手册描述为PSEU可以监视起飞形态警告、着陆形态警告、起落架、空/地传感等系统。可证,起飞形态警告的触发是由PSEU控制的,这是案例中要查看PSEU自检报告来分析起飞形态警告发生的原因。(二)起飞形态警告系统会在飞机处于不安全状态发出间歇性音响警告和点亮红色指示灯(选型)。当飞机在地面时,前推一个或两个油门杆(SDS中介绍前推油门杆应大于53度解算角位置,手册截图如下),可以预位起飞形态警告。若飞机此时还存在下列任何情况,则会触发起飞形态警告: • 后缘襟翼不在襟翼1至25的起飞范围,或 • 后缘襟翼在偏斜或非对称状态,或发生非指令性移动,或 • 前缘装置不在起飞形态下,或发生非指令性移动,或 • 减速板手柄未在DOWN位,或 • 扰流板控制活门打开,给地面扰流板联锁活门提供增压的液压油,或 • 停留刹车刹住,或• 安定面配平未调定在起飞范围这些触发条件里有两个是与减速板系统相关的,这里我们看一下减速板系统图。飞机在地面时,右主起压缩使连接钢索将地面扰流板联锁活门移动至打开位,假设地面扰流板控制活门异常而处于打开状态,此时A系统液压压力会通过这两个活门传送到地面扰流板作动筒,造成地面扰流板展开,破坏起飞时翼面形态。另一个情况,减速板手柄不在DOWN位,扰流板混合器指令控制活门打开,减速板伸出。我们接下来分析手柄位置和管路液压压力是如何探测的。(三)有四个减速板系统的电门信号会提供给PSEU,PSEU利用这些信号控制起飞警告和减速板放出灯工作,如下图。1.减速板手柄位置电门在空中,当减速板手柄从DOWN位移出超过7.5度(ARMED位),位置电门提供信号给减速板放出灯(SPEEDBRAKES EXTENDED)灯亮控制逻辑,放出灯点亮。位置电门与起飞形态警告控制无关联。2.减速板起飞警告电门该电门可以识别减速板手柄是否在DOWN位,给PSEU提供信号,是判断起飞形态警告触发的主要依据。当减速板手柄不在DOWN位时,减速板起飞警告电门无信号;而当减速板手柄移入到DOWN位时,减速板手柄上的挡块下压减速板起飞警告电门从而得到DOWN位信号。3.地面扰流板联锁活门接近传感器、地面扰流板联锁活门压力电门地面扰流板联锁活门有一个接近传感器和一个压力电门,接近传感器和压力电门将信号传送给PSEU,用于控制起飞警告系统和操作减速板放出灯。当地面扰流板操纵管路液压压力大于750psi时,压力电门接通发出信号,PSEU接收信号来此判断地面扰流板位置。如果存在这些情况时:①飞机在地面上、②减速板手柄在DOWN位、③压力电门探测管路液压压力大于750psi,减速板伸出灯点亮来提醒飞行员地面扰流板可能处于手柄指令和扰流板实际位置不一致的打开状态,若前推油门杆便会触发起飞形态警告,与前文列出的触发条件一致。这里用“可能”的原因是压力电门存在故障概率,灯亮也有可能是电门失效在接通位,发出错误的液压压力信号。当飞机在空中时,接近传感器的目标靠近,当飞机在地面时,其目标远离,从而感知空地状态。接近传感器的信号传递到PSEU,用来控制起落架手柄电磁线圈的解锁,可以防止在地面时收起落架。三、减速板手柄操纵要求本文案例,机组按照标准操作程序(飞行前程序)及正常检查单(起飞前检查单)程序规定,减速板手柄已正确放置在DOWN位,为什么仍会触发起飞形态警告呢?问题的关键在于起飞警告电门是否正确发出减速板手柄位置信号,该电门为微动电门,靠减速板手柄上的挡块下压弹簧片接通电门触点并保持电门闭合状态,发出手柄在DOWN位信号。根据统计数据,B737NG飞机出现起飞警告响导致的中断起飞事件最常见的原因是起飞警告电门没有感受到手柄压力。有可能是飞行员手柄未放到位导致的,更大因素是设计原因,手柄挡块与电门触点间易产生间隙,即手柄向上较小的移动就可能造成电门断开。例如,飞机在起飞滑跑阶段,如果手柄未完全下压到位,随着速度不断加大,飞机颠簸震动加剧,有可能导致手柄(挡块)上移,使弹簧片与电门间产生间隙,电门断开,产生手柄不在DOWN位的干扰信号。波音公司早在2008年发布的《737NG-FTD-31-08001》通告文件中就已经指出,由于设计缺陷引发起飞警告电门间歇性不在DOWN位会触发起飞形态警告。虽然波音公司后来提供改进建议、机务工作也有加强管理标准,如规范电门安装、加强日常的维护检查等,但是仍未彻底解决该问题。所以,保证减速板手柄准确放在DOWN是关键,规范飞行员的操作成为解决问题的重要途径。减速板手柄依靠其内部的一根弹簧向下保持住的,通过对比图我们能看出,手柄虽然在下卡位,但是弹簧力有可能不足以保证手柄完全进入卡槽,导致手柄挡块无法准确压下电门,因此需要飞行员核实手柄位置。正确的动作应该是抓住减速板手柄顶部向前推到DOWN位卡槽,再沿着手柄垂直于控制台的方向按压(图中红箭头方向),使挡块可靠压下电门。而不是向前下方,更不要采用大力拍击手柄的方式下压,大力拍击手柄可能造成手柄弹起或者震坏电门。除此以外,公司在今年2月25日发布了《关于737NG起飞形态警告测试的技术通告》,明确机组得到起飞许可后须进行起飞形态警告测试,对减速板起飞警告电门设计隐患进行管控。四、MAX飞机的变化由于MAX飞机采用扰流板控制电子组件(SCE)代替NG飞机传统的机械控制组件(扰流混合器),地面扰流板的控制转为全电控模式,减速板起飞形态警告触发逻辑已与NG飞机不同。由图得知,MAX飞机不再设置按压式的起飞警告电门,采用手柄位置转换器感知减速板手柄位置信号,从而使信号更可靠。SCE将接收到的减速板手柄位置信号传递给PSEU处理。五、结语因减速板起飞警告电门没有感受信号造成中断起飞,对公司运行、经济效益产生影响,还是很可惜的。所以飞行机组在日常运行中须按照程序要求规范操作,尽可能避免同类风险。以上就是思考案例得出的一些知识分享,希望对大家有所帮助。培训部飞行培训中心 孙鹏
-
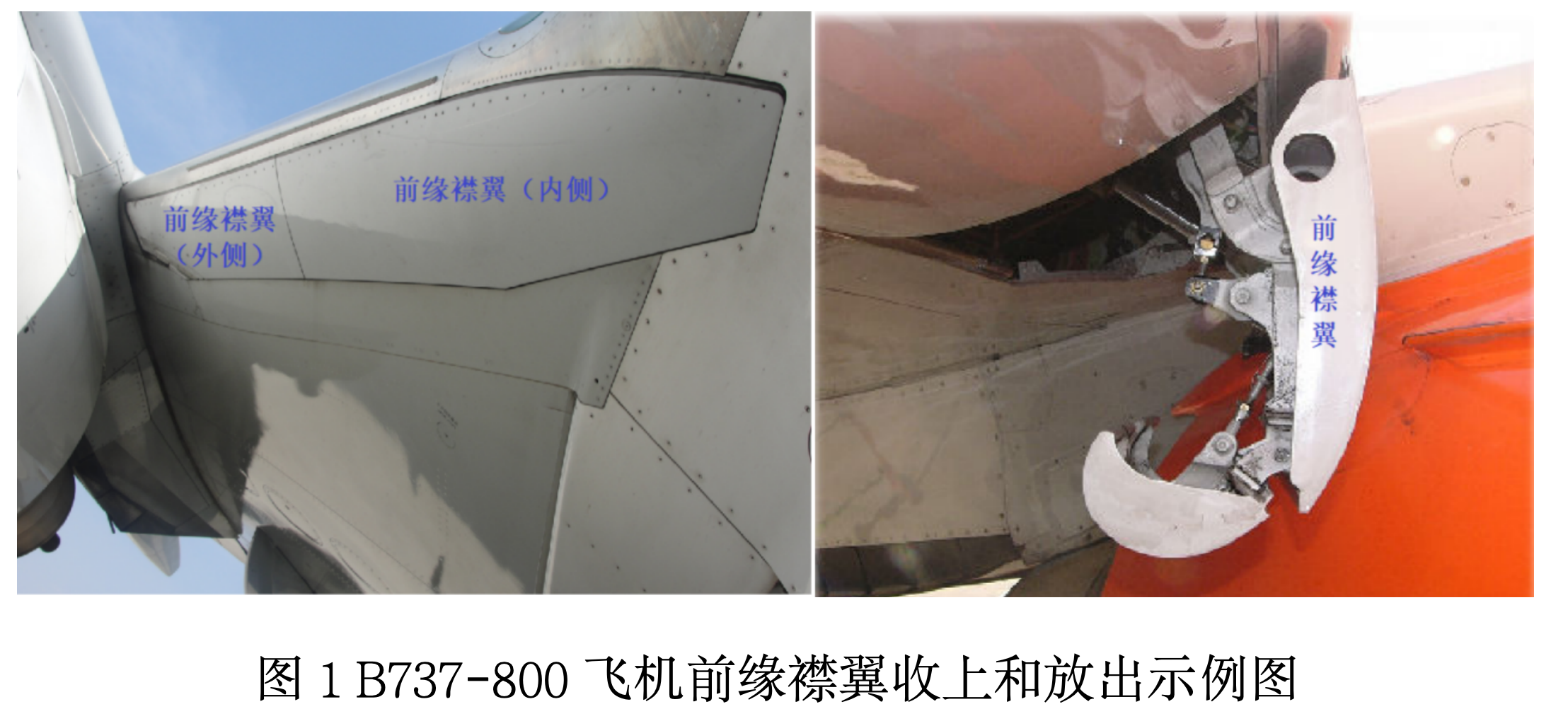
请介绍B737-800后缘襟翼故障处置方法 提问人:冯舒畅2023年10月28日,某公司一架B737-800飞机执行宁波至海口航班。该机在海口美兰国际机场10号跑道ILS进近,放襟翼15过程中出现后缘襟翼不对称,机组实施中止进近,按照《B737-800快速检查单(QRH)》处置,配置飞机构型,并进行着陆性能评估。机组评估后使用襟翼10再次进近,飞机安全落地。在此期间,公司地面设备也监控到该机左右后缘襟翼不对称报警,襟翼手柄15时,左侧襟翼指针181.9度、右侧襟翼指针172.7度,后缘襟翼旁通活门处于旁通位。B737机型在飞行运行中,涉及后缘襟翼的故障时有发生,主要表现为后缘襟翼不对称和不一致。接下来,笔者就B737-800飞机襟翼系统进行简单介绍。一、襟翼的分类及位置B737飞机安装有前缘襟翼和后缘襟翼。1.前缘襟翼是克鲁格襟翼,安装于发动机和机身之间的机翼前缘,每侧机翼上有两块。如图1所示。克鲁格襟翼由德国工程师沃尔纳·克鲁格在1943年发明,并在德国哥廷根大学的风洞内进行了测试。作为飞机的升力增强设备,在起飞和着陆期间,前缘襟翼随后缘襟翼的放出而向前下方翻转展开,和放出的前缘缝翼一起,增加机翼面积、翼型弯度和升力系数,从而达到在低速时增加飞机升力的效果。波音707飞机是最早使用克鲁格襟翼的大型民用客机。目前,克鲁格襟翼已广泛应用于民航客机。2.机翼后缘安装的是后退双开缝襟翼,属于富勒襟翼,位于每侧机翼后缘靠近翼根的部位,如图2所示。富勒襟翼由美国发明家、作家同时也是飞机工程师的哈兰·富勒于1927年以个人资金投入设计、测试并改进,目前广泛应用于多种机型。本文所说的襟翼主要是指这种襟翼。B737飞机上,每侧机翼上的后缘襟翼分为内侧襟翼和外侧襟翼,内、外侧襟翼各有两块以铝合金为主的金属板,分为主襟翼和后襟翼。作为飞机的辅助操纵设备,通过向后放出襟翼,可以增加机翼的弧度和面积,从而增加飞机的升力和阻力。二、襟翼的操作方式及旁通活门后缘襟翼的操作有两种方式:正常和备用。图3是两种操作方式的传动系统示意图。1.正常操作方式后缘襟翼的正常操作由液压B系统提供动力。襟翼手柄有9个位置,分别是UP(收上)、1、2、5、10、15、25、30、40。移动襟翼手柄时,可带动钢索系统,该钢索系统给襟翼控制组件的襟翼控制活门提供机械输入。襟翼控制活门通过旁通活门将液压B系统的动力供给PDU(襟翼动力传动组件)。PDU驱动襟翼传动系统移动后缘襟翼。当襟翼传动系统运动时,PDU给襟翼控制活门提供机械输入,从而带动前缘装置的移动。同时,位于左右机翼的襟翼位置发射器探测襟翼的位置信息,将信息发送至FSEU,并显示在襟翼位置指示器上。而每个机翼上的4个襟翼偏斜传感器则探测本侧机翼上的襟翼是否存在偏斜情况。正常操作方式的一大特点就是机械操作,液压作动。2.备用操作方式当失去液压B系统压力时,可以通过飞行操纵面板上的备用襟翼主电门预位备用操作方式,该电门的工作电源由1号直流汇流条提供。当将备用襟翼主电门置于预位(ARM)位时,有以下几个作用:①关闭后缘襟翼旁通活门,以此切断液压系统的压力并防止PDU的液锁;②接通备用襟翼继电器,该继电器向备用襟翼电动马达供电,电源来自2号交流转换汇流条;③预位备用襟翼位置电门;④启用备用液压系统的备用泵,该泵由2号交流转换汇流条供电;⑤预位备用液压系统低压灯。当预位备用襟翼主电门后,即可操纵备用襟翼位置电门将前缘装置全部放出(由备用液压系统提供压力),并通过电动马达收放后缘襟翼。在正常方式下,襟翼从UP位到卡位1用时相对较长,可达6秒,后续到卡位5、15、30及40则用时相对较短,每次移动大约用时2-3秒即可到位。后缘襟翼完全放下或完全收回约需38秒。在备用操作方式下,襟翼从UP位至卡位15约需2分钟,完全放出或收上约需2分39秒,收放速率大大降低。备用收/放襟翼速率如此慢的原因大致有以下几个:①备用收/放襟翼为电动操作,由2号交流转换汇流条供电的电动马达是一个位于主轮舱,重量仅有约7.3公斤的设备,其功率相比于液压马达大为减小,而每侧机翼上的襟翼操纵面板重量则高达260公斤,小设备驱动大面板,所以操作速率缓慢。同时,为了释放备用操作期间电动马达产生的热量,在完成一个收/放循环后(即收上位到卡位15再返回至收上位),再次放襟翼之前,需要5分钟的冷却时间;②备用操作期间,襟翼卸载功能、不对称保护和偏斜保护不可用,较慢的操作速率可给飞行员充足的时间观察襟翼位置,以防止空速超过襟翼机动速度或标牌速度而导致机翼过载。3.后缘襟翼旁通活门该活门位于主轮舱的后隔壁上,是一个双位置活门,由1号直流汇流条供电。该活门通过控制液压油流向来防止后缘襟翼的不正常状态。当活门在正常位时,来自液压B系统的压力可供向后缘襟翼液压马达。当活门在旁通位时,液压连接在液压马达的两侧,使液压马达停止操纵,以防止液锁,而且让备用襟翼操纵回传到液压马达。以下四种情况,旁通活门旁通:①备用襟翼操纵(预位电门在预位位);②后缘襟翼不对称;③后缘襟翼偏斜;④后缘襟翼非指令性运动。三、襟翼/缝翼电子组件(FSEU)该设备位于前电子设备舱,由1、2号直流汇流条供电,为后缘襟翼和前缘装置提供如下功能:①后缘襟翼位置指示;②后缘襟翼卸载;③后缘襟翼偏斜和不对称探测;④后缘襟翼无指令运动探测;⑤前缘襟翼和缝翼位置指示;⑥前缘巡航减压;⑦前缘襟翼和缝翼无指令运动探测。由于《B737-800飞行机组使用手册》关于襟翼卸载、前缘装置的指示等介绍已经非常详细,本文不再赘述。以下对后缘襟翼的指示、不对称、偏斜、非指令性运动和旁通活门做简单介绍。1.后缘襟翼位置指示襟翼位置指示器的工作电源来自2号交流转换汇流条。由图3可知,襟翼位置指示器指示的襟翼位置信息来自两个襟翼位置发射器,并经FSEU传送。在每个襟翼位置发射器内部,有3个解算器,解算器将襟翼位置进行解算,并以角度为单位显示在襟翼位置指示器上。当后缘襟翼在收上(UP)位时,襟翼位置发射器输出0解算度;在卡位15时,输出180解算度;在卡位40时,则输出270解算度。换言之,在后缘襟翼放下过程中,解算器度数增加。图4所示的三种指示从左到右分别是襟翼的正常状态、后缘襟翼不对称和后缘襟翼偏斜。2.后缘襟翼不对称如果一侧机翼上的襟翼与另一侧机翼上对称襟翼的位置不一致,则存在不对称状态(图5上部所示)。此种情况在飞行运行中较为常见。当左右两个襟翼位置发射器输出解算度的差值超过9度时,FSEU判定后缘襟翼存在不对称状态。此时,FSEU关闭后缘襟翼旁通活门,供向后缘襟翼的液压压力被旁通,襟翼停止运动,左右襟翼指示出现剪刀差(图4中间所示)。本文篇首所列的后缘襟翼不对称案例,左侧襟翼181.9度、右侧襟翼172.7度,左右相差达9.2度,超过了9度的触发值。事后经过调查,分析为右侧襟翼位置发射器突发故障。此种情况下,襟翼位置指示器指示襟翼位置发射器的实际值。需执行《B737-800快速检查单》中的“后缘襟翼不对称”检查单。3.后缘襟翼偏斜在收放过程中,如果后缘襟翼以不同速率工作而导致其扭曲,则会出现偏斜状态(如图5下部所示)。如果出现偏斜状态,FSEU 会关闭后缘襟翼旁通活门,襟翼停止运动,但保持对称,自动避免横滚。在飞行运行中此种情况比较罕见。由图3可知,每侧机翼上有4个襟翼偏斜传感器。FSEU比较同侧偏斜传感器与襟翼位置发射器的数据,如果不一致,则偏斜发生在该侧机翼。在偏斜状态下,FSEU给襟翼位置指示控制提供输入,左右襟翼位置指示器指针同步移动到位停止后,偏斜侧襟翼位置指示器指针再向上或向下移动15度,导致剪刀差出现。当判定后缘襟翼存在偏斜后,需执行《B737-800快速检查单》中的“后缘襟翼不一致”检查单。4.后缘襟翼非指令性运动(UCM:Uncommanded motion)后缘襟翼的非指令性运动表现为襟翼手柄不动,而襟翼指示器偏离了襟翼手柄对应的位置,并且两个指针没有分离。此时,FSEU关闭后缘襟翼旁通活门,需执行《B737-800快速检查单》中的“后缘襟翼不一致”检查单。5.襟翼指示器故障此情况出现的概率极小。表现为襟翼手柄移动,襟翼指针完全不动或两个襟翼指针分离,一侧襟翼指针停止不动,另一侧襟翼指针随手柄位置而移动(如图6 所示)。这种情况可由2号交流转换汇流条失电、指示器部分失效或指示器和FSEU之间的线路连接不良导致。该情况下,后缘襟翼旁通活门不会关闭,襟翼可正常操作,但《B737-800快速检查单》中没有相应的检查单,可参考“后缘襟翼不对称”检查单。飞行员也可结合以下两种方法判断襟翼位置指示失效:①查看PFD(主飞行显示)速度带上的襟翼限制标牌速度是否出现;②断开自动驾驶检查。如有不对称或偏斜存在,会导致两侧机翼的受力不一样,断开自动驾驶时,飞机可能出现突然的滚转。如果断开自动驾驶后,飞机没有滚转,驾驶盘也没偏转,飞机可以正常往前直飞,那么,结合第一条,就可判定为襟翼指示器出现故障。飞行员后续可根据上述方法确定襟翼放下的位置,并评估着陆情况。四、总结后缘襟翼的使用主要是在起飞爬升和进近着陆阶段,也就是飞行关键阶段。襟翼发生故障的概率虽然较低,但是,襟翼不对称可导致两个机翼产生的升力不一致,如果处置不当,可能造成飞机出现横滚现象,从而影响飞行安全。当然,在实际飞行中,襟翼出现的故障绝大多数都被飞行员安全地处置了,飞机也实现了安全运行,而按照手册尤其是按照检查单处置襟翼故障则为安全运行提供了重要支撑。培训部飞行培训中心 李军涛
-
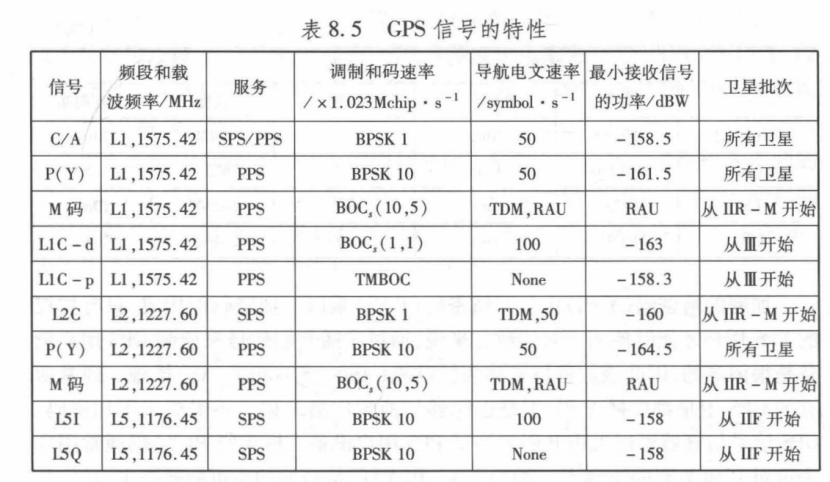
为什么GPS欺骗可以诱骗B737飞机改变航径 提问人:曹泽宇近年来,GPS欺骗已经成为多个国际区域多发的航空事件因素。2024年3月,土耳其航空飞往贝鲁特的航班由于GPS欺骗无法在贝鲁特机场降落,只能在机场上空盘旋40分钟后返回土耳其。自2023年8月下旬起,多架飞机在飞越伊拉克-伊朗边境空域时,导航系统被虚假GPS信号欺骗,导致飞机偏离航线,其中一架商务机差点误入伊朗领空。民航局《关于GPS信号受干扰的风险警示》(2025年第1期)中提到,蓄意干扰GPS信号的方式包括阻断(Jamming)和欺骗(Spoofing)两种情况。信号阻断通常是指发射与导航系统信号相同或相近频率的射频信号,对正常的GPS信号进行压制阻断干扰,导致GPS接收机无法正常工作。信号欺骗通常是指发射伪造的卫星导航系统信号或者延时转发真实卫星导航系统信号以误导飞机GPS接收机,使其计算出错误的定位、导航和授时数据,进而影响与之交联的其他机载系统或功能。GPS信号阻断对飞行的影响与机载GPS设备故障或丢失GPS信号对飞行造成的效果类似,即GPS提供的定位、导航和授时信息出现暂时或不可恢复的失效或性能下降。与GPS信号阻断相比,GPS信号欺骗造成的影响更加隐蔽,部分情况可能无告警信息,飞行机组难以觉察和识别,风险高,应当给予充分重视。本文的讨论基于波音737系列飞机。一、GPS简介及接收机工作原理(一)GPS简介NAVSTAR GPS最初由美国政府研制,用作军用导航系统。GPS由GPS指挥部控制,在国防部(department of defense, DoD)资助下进行运作。第一颗可运行的原型卫星于1978年发射,1993年末宣称具备初步运行能力(initial operational capability, IOC),1994年末具备了完全运行能力(full operational capability, FOC)。GPS为导航用户提供两类服务:一种称为标准定位服务(standard positioning service, SPS)的公开或民用服务,和一种称为精密定位服务(precise positioning service, PPS)的受限或军用服务。SPS的定位精度为在95%概率上达到15~25米。由于美国的安全问题,美国国防部故意对民间用户降低定位精度,使其为100米。SPS对所有具有合适设备的用户提供定位服务,而PPS仅仅对美国政府授权的用户提供定位服务,包括美国和NATO军队及他们的供货商,PPS信号为加密信号。PPS的定位精度在95%概率上为小于18米。GPS导航信号包含10种不同的信号,通过三个频段广播,这三个频段分别为L1 (link 1)、L2(link 2)和L5(link 5)。由于C/A码和精密(加密的精密)(precise (encrypted precise), P (Y))码信号在GPS现代化项目之前已经存在,因此将它们称为传统的GPS信号。其他的信号作为GPS现代化的一部分并没有被所有的卫星广播。加密的精密码(Y码)由公开精密码(P码)乘以一加密码而构成,只有授权的PPS用户才能够使用。对于敌方来说,通过广播复制信号来欺骗GPS用户设备是很困难的,因此该加密技术称为抗欺骗(Anti-Spoofing, AS)措施。由表8.5可知,被所有卫星广播、提供SPS服务的,仅限于C/A码。而C/A码是公开码,无法对抗欺骗。目前我公司机队使用的GPS接收机为Collins公司的GLU系列和Honeywell公司的RMA系列,均为使用C/A码的民用产品。(二)GPS接收机工作原理GPS接收机的工作基于测距原理,即通过测量接收机与卫星之间的距离来确定位置。接收机内部通常存储有卫星在轨道上的位置数据,并利用无线电信号实现距离测量。无线电信号以光速传播,接收机通过测量信号从卫星发送到接收机的时间,结合已知的卫星位置,可以计算出接收机与卫星之间的距离。具体实现中,接收机会生成与卫星发送的信号一致的本地信号,通过比较两者的时间差(△t),得出卫星信号到达接收机所花费的时间。为了保证测量的准确性,每颗卫星上都配备了高精度的原子钟,用以保持一致的时间精度。而接收机内部的时钟则并非原子钟,因而存在一定的时间误差。这种误差被定义为接收机时间与GPS时间之间的差值,记为△tBIAS。由于△tBIAS是未知的,接收机需要通过计算来确定这一偏差值。为了同时确定飞机的位置(包括纬度、经度和高度)以及时间偏差△tBIAS,接收机必须满足以下条件:1.需要至少4颗卫星的位置数据;2.同时测量接收机与这4颗卫星之间的距离;3.利用4个距离方程计算4个未知数,即: (1)纬度(2)经度(3)高度(4)时间偏差△tBIAS通过这种方式,接收机能够精确计算飞机的三维位置和时间偏差,从而实现定位功能。二、GPS接收机关于水平性能的监控指标以及RAIM功能(一)水平性能监控指标GPS接收机中有三个水平指标:水平精度扩散因子(HDOP)、水平品质指标(HFOM)和水平完好性限度(HIL)。1.水平精度扩散因子(HDOP)定义:HDOP(Horizontal Dilution of Precision)是描述GPS定位精度的一个指标,用于量化由卫星几何分布引起的水平定位误差。它反映了接收机计算水平位置(经度和纬度)时因卫星位置分布而导致的误差放大程度。计算方法:HDOP是通过卫星几何分布的数学模型计算出来的,具体由卫星与接收机之间的几何关系决定。其计算基于GPS导航方程的协方差矩阵,公式如下:首先,根据GPS导航方程,建立几何矩阵 G(由卫星位置和接收机位置组成)。计算协方差矩阵: 其中,Q 是协方差矩阵。从协方差矩阵中提取水平精度扩散因子: 其中,和 分别是协方差矩阵中对应水平位置(x 和 y 坐标)的分量。影响因素:卫星的几何分布:卫星分布越均匀,HDOP 越小,定位精度越高;分布越集中,HDOP 越大,定位精度越差。一般情况下,HDOP 值越小表示定位水平精度越高。水平品质指标(HFOM)定义:HFOM(Horizontal Figure of Merit)是计算出的水平定位误差的定量指标,用于反映接收机在水平位置上的定位精度,通常以米(m)为单位。它考虑了接收机的测量误差以及卫星的几何分布。计算方法:HFOM 的计算公式为:HFOM=HDOP×UERE其中:HDOP 是水平精度扩散因子;UERE(User Equivalent Range Error)是用户等效测距误差,表示由卫星信号传播误差(如多路径效应、大气延迟、接收机噪声等)引起的测距误差,通常以米为单位。影响因素:卫星几何分布:HDOP 越小,HFOM 越小;测距误差:UERE 越小,HFOM 也越小。HFOM 直接反映了接收机的水平定位精度,值越小表明定位越精确。水平完好性限度(HIL)定义:HIL(Horizontal Integrity Limit)是水平完好性监测的限值,表示在给定的概率和警告时间内,接收机能够保证的最大水平误差。它是导航系统用来判断是否满足运行要求的重要参数。计算方法:HIL 的计算涉及到完好性监测算法,主要基于以下公式:HIL=K×HFOM其中:K 是一个与完好性要求相关的扩展因子,具体值由系统完好性要求决定;HFOM 是水平品质指标。影响因素:完好性要求:系统要求的完好性概率(如 10^-7 的误差概率)会影响 K 的选择;接收机的定位精度:HFOM 越小,HIL 越小。HIL 通常用于飞行导航系统中,以确保接收机在水平定位上的最大误差不会超过运行需求。总结与关系HDOP 是基础指标,反映卫星几何分布对定位精度的影响;HFOM 在 HDOP 的基础上进一步结合测距误差,得出实际的定位精度;HIL 则基于 HFOM,加入完好性要求,提供系统可接受的最大误差范围。(三)RAIM功能GPS接收机具有接收机自治式完好性监测(RAIM)功能。RAIM对卫星的工作状态进近监测,即监测GPS接收机用以计算数据的那些卫星状态。为了实现RAIM功能,GPS接收机需要从至少5颗卫星接收到有效的伪距测量值(理想情况下更多)。这是因为要计算出一个三维位置和时间校正,至少需要4颗卫星的数据;而额外的一颗卫星提供的数据则用于冗余检查,以便进行错误检测。RAIM功能的输出是对GPS位置误差的估值。自治完好性监测值送给FMC,FMC利用此自治完好性监测数据决定GPS数据是否能用于导航。三、GPS欺骗的两种方式(一)伪造信号攻击者可以伪造GPS信号,即在与合法GPS信号相同频率下并以高于合法GPS信号功率的强度传输信号。卫星模拟器能够同时广播来自十颗卫星的携带伪造导航数据的信号。伪造信号也可以通过操控和重新广播实际信号(即诱射)生成。只要受害接收器对伪造信号保持锁定,受害接收器的位置信息就会受到攻击者的控制或影响。(二)转发信号攻击者在一处接收合法的GNSS信号,然后将这些信号中继到另一处,在不进行任何修改的情况下重新传输它们。这样,如果使用了加密技术,对手就可以避免被检测到,同时它可以“呈现”给受害者在受害者位置通常不可见的GNSS信号。四、GPS接收机的水平指标以及RAIM功能是否能有效检测GPS欺骗三个水平指标(HDOP、HFOM和HIL)在一定程度上可以间接反映GPS信号的某些异常,但它们本质上是基于已接收到的信号计算得出的,无法直接检测或防御GPS信号欺骗。因此,它们无法单独应对GPS信号欺骗,但可以作为辅助工具,结合其他防御机制来提高检测和应对能力。(一)HDOP(水平精度扩散因子)作用:反映卫星几何分布对定位精度的影响。如果卫星的几何分布突然变得异常(如集中在一侧),HDOP值可能会显著增大。局限:在GPS信号欺骗场景中,攻击者可能伪造多个“虚假卫星”,这些伪造信号可能模拟出良好的几何分布,从而维持较低的HDOP值。即使HDOP值看似正常,也无法说明接收到的信号是否真实。(二)HFOM(水平品质指标)作用:结合HDOP和测距误差(UERE)来量化水平定位误差。如果信号质量下降(如噪声增大),HFOM值会升高。局限:GPS欺骗攻击通常伪造高质量的信号,使得HFOM值看起来正常甚至较低。因此,HFOM对伪造信号的检测能力有限。(三)HIL(水平完好性限度)作用:反映在完好性监测中接收机可接受的最大水平误差。在欺骗攻击中,如果攻击信号设计得当,HIL值可能不会触发警告。局限:HIL的计算依赖于HFOM和完好性要求。如果伪造信号模拟了高精度的导航环境,HIL值可能不会超出预期范围,从而无法识别伪造信号。(四)RAIM功能波音737的GPS接收机支持基础的RAIM功能,RAIM功能通过一系列步骤确保信号的完整性,首先利用冗余校验依赖至少五颗卫星的几何分布并通过残差分析检测信号异常,同时进行一致性检验以检查卫星信号间的伪距、多普勒频移等参数是否自洽,在检测到异常时,RAIM可能排除故障卫星。然而,高精度欺骗依然可以绕过RAIM,方法包括:1.同步多卫星欺骗策略,即生成多个虚假卫星信号并模拟合理的卫星几何分布来避免触发告警;2.动态渐进偏移方法,如缓慢调整位置参数和与惯性导航系统数据同步来实现欺骗而不被发现;3.针对RAIM算法阈值的优化,通过控制残差范围以及利用接收机时钟偏差掩盖欺骗信号的不一致性;4.混合真实与欺骗信号的方式,比如部分信号替换和逐步增强欺骗信号功率来降低被检测的风险。这些策略,可以有效地规避基于RAIM的信号完整性检测机制。五、FMC的位置更新机制如果GPS数据有效,FMCS可以在地面上使用GPS数据来更新FMC位置。在空中,FMC使用从GPS数据和ADIRU的输入计算的位置来修正其基于ADIRU的惯性水平位置。这是FMC位置并且是以经纬度来计算的。如果数据是有效的,FMC将使用其本侧的来自多模式接收机的GPS输入。如果本侧的数据无效,则使用对侧的GPS数据。如果欺骗信号绕过GPS接收机的水平指标检测以及RAIM功能,则数据被认为有效。根据FMC的位置更新机制,FMC位置将被欺骗信号诱骗。六、结论GPS欺骗对飞机导航系统构成了严重威胁,其隐蔽性强,难以被飞行机组觉察和识别。尽管GPS接收机的水平性能监控指标和RAIM功能在一定程度上可以间接反映GPS信号的异常,但它们无法单独应对GPS信号欺骗。因此,需要结合其他防御机制来提高检测和应对能力,以保障飞行安全。培训部飞行培训中心 刘刚
-
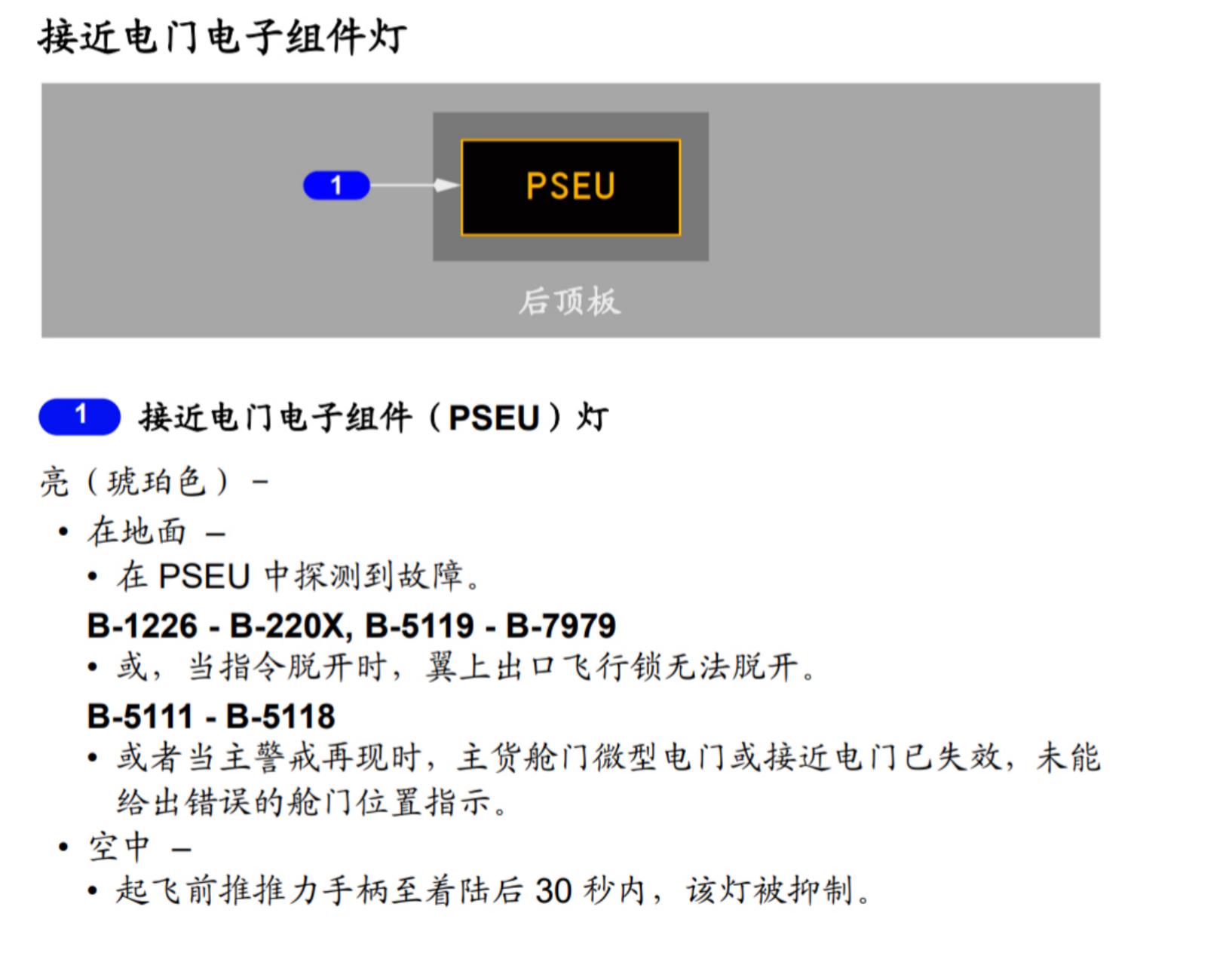
PSEU故障介绍及处置 提问人:丁子阳一、故障介绍FCOM针对接近电门电子组件指示灯(后续简称PSEU灯)作如下描述:PSEU灯点亮的含义和逻辑 : 1、PSEU处理从空/地传感器来的信号,并将空/地信号作为参数发送到飞机的其它系统以备使用。2、PSEU监控以下系统并在必要时提供警告:① 起飞形态警告②着陆形态警告③起落架④空/地传感⑤舱门警告⑥减速板伸出警告等我们来看一下英文原文的描述:根据英文描述,应理解为:PSEU探测到某个故障(而非PSEU本身故障)。PSEU逻辑图也能很好的反映这点:故障的类型可以分为内部和外部两种,也就是说,手册中(包括FCOM、MEL、QRH等)所谓的PSEU故障应理解为:PSEU探测到内部或外部故障:关于PSEU灯点亮还有一条描述为“发出指令时翼上应急出口飞行锁无法断开”,虽然单独列出,但是实际上,飞行锁无法根据PSEU发出的指令正常断开,本身可以被视作一种特殊的外部故障——外部输入探测故障:二、快速检查单:PSEU故障检查单QRH:Proximity Switch Electronic Component Fault当PSEU灯点亮时,机组需执行相应检查单:解释:按压主警告牌,若PSEU灯熄灭,说明是“可放行故障”。若PSEU灯无法熄灭,由于无法通过按压主警告牌判断故障是否能够放行,因此需要执行步骤二进一步证实:解释:通过双发关车或设置停留刹车,如果不能熄灭PSEU灯,则说明是“不可放行故障”。如果PSEU灯能够通过双发关车或设置停留刹车熄灭,则说明是“可放行故障”。三、最低设备清单:PSEU故障MEL:Proximity Switch Electronic Component Fault如上图所示,由“PSEU故障——每次放行前进行PSEU的故障检查”可知,此附带维修程序(M)的放行依据主要是给地面放行人员使用的。当放行人员发现头顶板PSEU灯点亮后,他们需按照上图所示步骤接近PSEU控制盒(位于电子设备舱)并操作程序自检,以自检结果作为是否能够放行的依据。同理可知,由“PSEU故障——PSEU灯可以熄灭”可知此项放行依据偏向于飞行机组使用。比如,当双发启动好,或者飞机滑出之后,机组发现PSEU灯点亮,按照QRH进行处置并成功熄灭PSEU灯之后,联系地面机务告知故障状况。大家可以想象以下几种场景:场景一:机组尚未进场,地面放行人员对飞机进行检查的时候发现PSEU灯亮,于是他心里头浮现出两个问题:1、这架飞机到底还能不能放行?2、到底是什么问题导致PSEU灯亮?如果是比较严重的问题(不可放行),还涉及到如何安排接下来的排故工作。因此,该放行人员根据MEL要求来到电子设备舱,通过PSEU自检功能调取故障代码来确认:场景二:与场景A相同的情况,这次是一个比较有经验的放行人员,当他发现PSEU灯亮时,他并没有第一时间去电子设备舱,而是学着飞行机组的操作,通过按压复位电门发现能够熄灭PSEU灯,因此判断为可放行故障。基于以上判断,若时间允许,该放行人员才会开电子设备舱去查询故障代码,根据故障代码放行:若时间紧张,则该放行人员会直接根据以下MEL放行:场景三:在飞行前准备过程中,机组确认飞机无MEL项。滑行过程中,机组发现PSEU灯亮,立即报告塔台,同时查找QRH找到了相应内容,通过主警戒按压复位,发现未能熄灭PSEU灯,然后设置停留刹车,发现能够熄灭PSEU灯。于是,机组联系地面告知具体情况,经过简单的沟通,且有MEL放行依据,因此获悉能够继续执行本次航班。本次放行依据如下:从以上三个场景可以看出,两个MEL放行依据,一个带M程序,一个不带M程序,看似矛盾,归根结底是给不同的对象使用的:当放行人员负责时,并不看故障灯是否能够熄灭,而是偏向于以PSEU自检之后的故障代码作为放行依据的。当然,在时间紧张的情况下,放行人员也被允许使用不带M程序的放行依据(后续还需补充M程序);当飞行机组负责时(比如飞机已滑出),仅以故障灯复位作为放行的依据(尽管并不直接参考MEL,但是所执行的QRH本质上就是验证是否符合MEL)。这两个放行依据本质上是等效的,也即是说:如果是可放行的故障,那么在驾驶舱内或者PSEU自检都是可以复位PSEU灯的。反之同理。1、当新构型PSEU灯点亮时,根据手册描述,当故障是可放行的时候,机组通过双发关断或者设置停留刹车都可以熄灭故障灯,也就是说,双发关断和设置停留刹车是或的关系,这一点我们也可以通过详细的逻辑图得知:如图所示,停留刹车信号和双发关断信号共同接入一个或非门。也即是说,当你按照QRH执行第二步时,你发现设置停留刹车无法熄灭PSEU故障灯,那么,你就无需再抱着侥幸的心态尝试通过关车来熄灭故障灯已达到放行条件了。2、还有一个与PSEU相关的放行依据截图如下:仅当能够确认PSEU灯本身发生故障时进行此项,以进一步通过PSEU自检功能确认是否有故障、故障是否允许放行。四、常见PSEU灯亮原因汇总(1)起落架近位传感器。近位传感器给PSEU提供信号作为PSEU判断空地逻辑的依据。(2)无线电高度表故障;由于无线电高度表设计缺陷,经常导致PSEU灯亮,一般还伴随飞行指引消失或RA故障旗,夏季雨季居多,多数通过更换天线或收发机解决,重点需要对天线做好密封。(3)地面扰流板内锁活门信息;可能原因为地面扰流板内锁活门钢索,或地面扰流板内锁活门近位传感器S1050。(4)翼上应急门飞行锁;因应急门锁的位置电门接触不良,会使PSEU内的系统1和系统2所接收的信号不一致。(5)襟翼位置电门S138故障;曾经有S138在空中因污染而短路,发出襟翼为25度的虚假信息,而错误产生着陆警告。(6)地面扰流板压力电门故障。(7)速度刹车(扰流板)手柄电门S651故障,该电门也会导致起飞警告响。(8)PSEU内部故障:一般为PSEU本身或相关电路及接地故障。(9)翼上应急门位置电门故障。(10)安定面配平电门不一致;由于某些原因导致成对电门提供信号不一致超过1.5秒时就会触发PSEU内部“水平安定面不一致故障”信息,产生故障代码31-52004并点亮PSEU灯和MASTER CAUTION灯。当飞机在地面出现PSEU灯亮故障时,建议机组按照以下步骤执行“一个安定面配平循环操作”后再判断是否可继续执行航班:从绿区开始向UP方向配平直到超过绿区然后向DOWN方向配平超出绿区,然后回到绿区中间位置。此时:A.如果PSEU灯灭,则飞机可以继续执行航班。B.如果PSEU灯仍亮,则说明有其它故障存在,需要进一步判断故障并按照相关MEL条款放行飞机或按照FIM手册相关章节进行排故。(11)发动机未运转信息:一般为相关跳开关跳出或继电器R564故障。(12)自动油门电门组件故障。(13)起落架手柄:如果PSEU探测到起落架手柄位置信号存在异常,会触发PSEU灯亮,有运营商曾反映,起落架伸出后,三个红灯和绿灯同时亮,有时再重新收放一次起落架后恢复正常,研究发现,起落架控制系统的后扇形盘以及钢索等机械结构存在一定问题,导致放下起落架后,起落架手柄内部的S1电门没有被作动,从而触发起落架指示问题。(14)主暗/亮灯光测试组件M1456内C5和C6过热损坏,会造成PSEU灯的电压波动与指令不一致也会导致PSEU灯亮。(15)还有一种很普遍的现象:飞机落地后在旅客下客期间,因为此时可能也在卸货,因此前起落架减震会翘起来点,导致前起落架空/地传感器判断飞机不在地面进而触发PSEU指示灯亮。由于飞行机组无法判断是真故障还是假故障,因此还是需要报地面机务来确认情况。五、机组处置流程SOP 中对于在发动机起动前的处置程序如下:1) 查阅 MEL/CDL,并与机务人员沟通确认符合放行标准; 2) 确认机务人员按照 MEL 执行了维护程序 M 项(如有); 3) 确保完成 MEL/DDG 的操作程序 O 项(如有)。SOP 中对于在发动机起动过程中直至起飞前出现设备失效的处置程序如下:飞行机组执行 QRH(冗余故障不需要执行检查单)后,还应查阅 MEL/CDL。若 MEL 中明确指出不能放行或可以放行但还有 M 项,应滑回停机位。如果 MEL/DDG 中不含 M 项但含有 O 项,机组应完成相应的工作或步骤,并在 TLB 中完成对故障描述的填写后,在维护措施栏中填写“机组按照 MEL/DDG XX 故障 O 项执行”,机组无需滑回检查。因PSEU故障中断起飞后,机组及时报告塔台,申请脱离跑道,脱离跑道后执行 QRH、查阅 MEL,联系 AOC,经机组与 AOC 综合 评估后决定是否滑回做进一步检查。飞行部二大队 蔡顺利