搜索到
135
篇与
的结果
-
 运行RNP时不能更改进近程序以及高度速度限制,那直飞的时候有没有限制,能不能直飞FAF点? 运行RNP时不能更改进近程序以及高度速度限制,那直飞的时候有没有限制,能不能直飞FAF点?提问人:庞琛根据 DOC9613《基于性能的导航手册》及厂家要求,直飞IF点的指令只有在与最后进近航径的航迹夹角不超过 45 度时才可接受,且不可直飞FAF点。程序执行开始前,除开始进近之前 (在起始进近定位点 (IAF) 之前并与机组人员工作量相符) 的常规程序外,飞行机组人员还必须通过对比进近图确认已经载入正确的程序。这一检查必须包括:航路点的顺序;航径合理性、进近航段距离、入航航向精度及最后进近航段长度。 注:至少这一检查可以是对达到本段所述目标的航图显示器的简单检查。DOC9613中明确要求:以沈阳RNP进近为例:后边我们再来补充一点RNP需要了解的基本知识:RNP 规范以RNP X标识,如RNP4。对RNP和RNAV标识而言,符号“X”(指明时) 均表示在空域、航路或程序范围内运行的所有航空器至少在 95%的飞行时间里,可以达到以海里计的侧向导航精度。涉及机载性能监视与告警方面三个主要的误差是:航径定义误差 (PDE)、飞行技术误差 (FTE) 和导航系统误差 (NSE)其中航径定义误差 (PDE) 通过数据库的完好性及定义航径的功能要求进行约束,可以忽略不计。RNP和RNAV的其中一条区别在于需要机载性能监视与告警能力,它可以满足两种需要,一是机载需要,二是空域设计需要。“机载”明确意味着性能监视与告警是在航空器上完成,而不是其他任何地方,“监视”是指监视航空器的性能,包括确定航空器定位误差和/或遵循预期航径等能力方面。“告警”与监视相关:如果航空器的导航系统性能不佳,就会就此向飞行机组人员告警。基于性能导航 (PBN) 的概念规定,必须为航空器 RNAV系统在配备适宜的导航基础设施的情况下根据特定空域概念下拟实施的运行,确定在精度、完好性、可用性、连续性和功能性方面所需达到的性能要求。对于实施RNP进近 (RNP APCH) 精度:在RNP APCH 的起始、中间航段和 RNAV 复飞运行期间,在至少95%的总飞行时间中,侧向总系统误差必须在±1 海里之内。在至少95%的总飞行时间中,沿航迹误差也必须在±1海里之内。在RNP APCH最后进近航段运行期间,在至少95%的总飞行时间中,侧向总系统误差必须在±0.3 海里之内。在至少95%的总飞行时间中,沿航迹误差也必须在±0.3海里之内。为了达到这一精度要求,95%的飞行技术误差在RNP APCH的起始、中间航段和RNAV复飞中,均不应超过0.5海里。95%的飞行技术误差在RNP APCH最后进近航段,不应超过 0.25 海里。完好性:航空器导航设备故障按照适航条例被归类为重大故障 (即每小时 10-5)。连续性:如果操作人员可以切换至一个不同的导航系统飞往一适当的机场,失去功能则被归类为小故障。如果复飞程序基于常规方式 (如无方向性无线电信标、甚高频全向无线电信标、测距仪),就必须安装并能够使用相关的导航设备。性能监视与告警:在RNP APCH起始、中间航段和RNAV复飞运行期间,如果未达到精度要求,或侧向总系统误差超过2海里的概率大于10-5,则RNP系统须提供告警,或RNP系统和驾驶员须共同提供告警。在 RNP APCH最后进近航段,如果未达到精度要求,或侧向总系统误差超过0.6海里的概率大于10-5,则RNP系统须提供告警,或RNP系统和驾驶员须共同提供告警。
运行RNP时不能更改进近程序以及高度速度限制,那直飞的时候有没有限制,能不能直飞FAF点? 运行RNP时不能更改进近程序以及高度速度限制,那直飞的时候有没有限制,能不能直飞FAF点?提问人:庞琛根据 DOC9613《基于性能的导航手册》及厂家要求,直飞IF点的指令只有在与最后进近航径的航迹夹角不超过 45 度时才可接受,且不可直飞FAF点。程序执行开始前,除开始进近之前 (在起始进近定位点 (IAF) 之前并与机组人员工作量相符) 的常规程序外,飞行机组人员还必须通过对比进近图确认已经载入正确的程序。这一检查必须包括:航路点的顺序;航径合理性、进近航段距离、入航航向精度及最后进近航段长度。 注:至少这一检查可以是对达到本段所述目标的航图显示器的简单检查。DOC9613中明确要求:以沈阳RNP进近为例:后边我们再来补充一点RNP需要了解的基本知识:RNP 规范以RNP X标识,如RNP4。对RNP和RNAV标识而言,符号“X”(指明时) 均表示在空域、航路或程序范围内运行的所有航空器至少在 95%的飞行时间里,可以达到以海里计的侧向导航精度。涉及机载性能监视与告警方面三个主要的误差是:航径定义误差 (PDE)、飞行技术误差 (FTE) 和导航系统误差 (NSE)其中航径定义误差 (PDE) 通过数据库的完好性及定义航径的功能要求进行约束,可以忽略不计。RNP和RNAV的其中一条区别在于需要机载性能监视与告警能力,它可以满足两种需要,一是机载需要,二是空域设计需要。“机载”明确意味着性能监视与告警是在航空器上完成,而不是其他任何地方,“监视”是指监视航空器的性能,包括确定航空器定位误差和/或遵循预期航径等能力方面。“告警”与监视相关:如果航空器的导航系统性能不佳,就会就此向飞行机组人员告警。基于性能导航 (PBN) 的概念规定,必须为航空器 RNAV系统在配备适宜的导航基础设施的情况下根据特定空域概念下拟实施的运行,确定在精度、完好性、可用性、连续性和功能性方面所需达到的性能要求。对于实施RNP进近 (RNP APCH) 精度:在RNP APCH 的起始、中间航段和 RNAV 复飞运行期间,在至少95%的总飞行时间中,侧向总系统误差必须在±1 海里之内。在至少95%的总飞行时间中,沿航迹误差也必须在±1海里之内。在RNP APCH最后进近航段运行期间,在至少95%的总飞行时间中,侧向总系统误差必须在±0.3 海里之内。在至少95%的总飞行时间中,沿航迹误差也必须在±0.3海里之内。为了达到这一精度要求,95%的飞行技术误差在RNP APCH的起始、中间航段和RNAV复飞中,均不应超过0.5海里。95%的飞行技术误差在RNP APCH最后进近航段,不应超过 0.25 海里。完好性:航空器导航设备故障按照适航条例被归类为重大故障 (即每小时 10-5)。连续性:如果操作人员可以切换至一个不同的导航系统飞往一适当的机场,失去功能则被归类为小故障。如果复飞程序基于常规方式 (如无方向性无线电信标、甚高频全向无线电信标、测距仪),就必须安装并能够使用相关的导航设备。性能监视与告警:在RNP APCH起始、中间航段和RNAV复飞运行期间,如果未达到精度要求,或侧向总系统误差超过2海里的概率大于10-5,则RNP系统须提供告警,或RNP系统和驾驶员须共同提供告警。在 RNP APCH最后进近航段,如果未达到精度要求,或侧向总系统误差超过0.6海里的概率大于10-5,则RNP系统须提供告警,或RNP系统和驾驶员须共同提供告警。 -
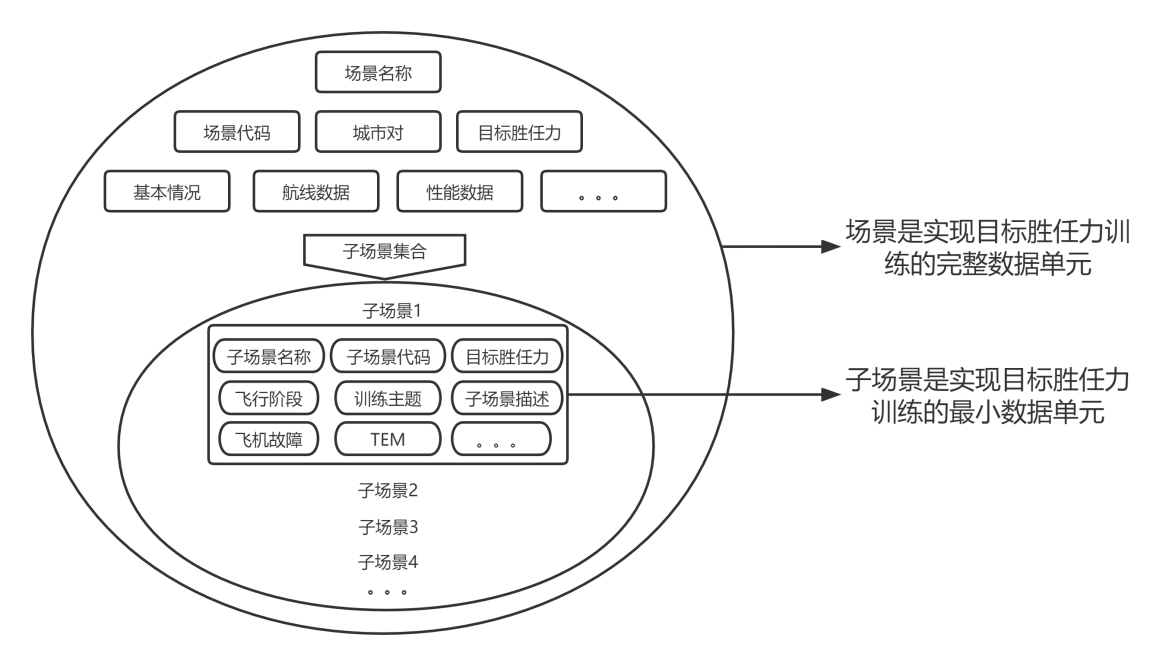
关于EBT课程开发规范性的探讨 EBT课程的训练过程确实更加贴近运行实际,那它的场景是怎么设计出来的呢?提问人:许跃飞谢邀。!飞行训练是航空安全之本,根据民航局飞行员技能全生命周期管理体系(PLM)建设实施路线图的指引,山航持续推进训练体系改革。2022年9月民航局飞标司批准山航进入EBT复训实施试点,在近一年的EBT复训实施过程中,对标局方AC-121-QS-138R1(《循证训练 (EBT)实施方法》以下简称AC-138)相关要求,为提高EBT课程质量和开发效率,提升教员/检查员施训质量,保证训练数据的完整性,明确课程开发规范性是试点单位需要重点关注的工作方向。民航局发布的《数据驱动的循证训练(EBT)课程研发指南》(IB-FS-OPS-007)提供了完整的课程场景开发流程指导和相关规范,但在实际实施过程中,场景的设计还需要考虑对数字化系统开发、大规模场景库构建、批量开发工作协同、底层数据结构体系化、训练数据收集应用等方面的友好兼容性。因此在IB-FS-OPS-007研发指南的基础上,实施单位需要进一步结合EBT训练实际情况对场景要素和数据结构进行细化和规范,建立更加匹配航司自身训练实际的数据化结构体系。在EBT课程开发过程中,笔者进行了一些探索和思考,现与大家分享以期获得更多专业的讨论和交流,共同提高EBT课程开发的规范性。在EBT课程中,场景是构建训练课程的主体内容,也是承载完整训练要素的载体平台。EBT与传统复训在课程内容上相比,不再以单一科目进行飞行员训练和评估,而是通过复杂的数据元素(如飞行阶段、飞机故障、天气数据、训练主题等)来构建更符合实际运行环境的训练场景。因此在课程开发过程中,场景的设计和开发需符合局方咨询通告要求、要素包含完整、内容结构规范、贴合运行实际、信息传递准确、实施使用便捷、数据收集友好等。EBT训练场景是实现目标胜任力训练的完整数据单元,以实际航班运行为背景,通过将所有航线运行要素与训练体系要素进行专业设计和逻辑关联,来实现既定的胜任力训练目标。而子场景是组成场景的子单元,也是实现目标胜任力训练的最小数据单元,其通过构建一个更加具体的训练情景,来链接更全面的课程要素和数据逻辑,从而实现更丰富真实的场景内容,完成更具体的训练任务。(图示一、课程场景和子场景的包含关系)为了实现上述EBT课程场景的功能和目标,提升课程开发的质量和效率,规范课程开发和实施的流程,同时为EBT场景库的建设和训练数据的规范收集做好充足准备,所以制定EBT场景的架构体系标准和构成要素规范就显得非常迫切和必要。一、目前研究获得了应用效果在场景内容满足局方AC-138要求的基础上,依据IB-FS-OPS-007的指南规范,结合实际训练需要和EBT实施经验,笔者尝试将课程场景的内容进行体系化和标准化,主要包含对场景和子场景的构成要素和构建体系进行规范,通过前期的课程开发实践,取得了一些的应用效果,具体表现在:1.在制定EBT场景内容开发规范后,CD(Course Developer 课程开发人员)开发课程场景不需要再考虑场景的构成要素,可以将更多精力用于提升课程开发质量,课程场景内容更加全面,也更贴近实际运行场景;2.EBT场景开发规范统一了课程开发语言,提升了CD的专业一致性,从而提高了协同开发的工作效率,也大大提高了课程开发的整体效率。3.EBT场景规范将降低场景开发质量监控的难度,通过统一的标准对场景内容进行审核,可以快速识别不符合基本要求的场景内容,从而提升后续的质量监控效率。4.EBT场景规范将提升课程开发的合规性,AC-138所包含的核心胜任力、飞行阶段、训练主题等各类周期性合规要求可通过课程规范将规则条款进行覆盖,将降低开展EBT训练的合规性监控成本。5.通过不断扩充和完善EBT场景规范,可以覆盖更多的实际训练需求,并且在统一体系框架下构建EBT场景。既可以保证长历史时间维度上课程场景的规范统一,提高场景的延续性和一致性;又可以提高场景的复用性,让持续的场景库建设成为可能。6.EBT场景规范可提升课程实施的质量和效率。使用统一的场景要素标准,课程实施教员更容易准确获取课程信息和任务目标,减少沟通成本,提高教员一致性;同时规范的课程数据结构,也为更完整的训练数据收集和分析应用提供了基础。二、目前就场景要素规范和子场景(情景)要素规范的探索(一)场景构成要素规范EBT训练场景是实现目标胜任力训练的完整数据单元,因此构建场景的要素应该是支持场景整体训练开展的数据元素,从而帮助课程实施者快速、准确、完整的获取场景的各类支持信息,有效把控训练目标和课程进度。场景构成要素主要包含下列元素:1.场景名称:用于定义场景的名称,命名规则以城市对名称、主要场景内容概括等形式,需要考虑名称含义的准确性和易懂性。2.场景代码:用于标记场景唯一性的代码,命名规则可以参考TEM代码命名规则,或其它自定义规则。3.城市对:建议在场景开发时,使用完整的城市对作为起始点,但在不需要完整航线或完整数据的场景中,可以不使用本元素。4.目标核心胜任力:场景关联的核心胜任力,可以关联多项,如果场景包含目标核心胜任力,则可以按需使用本元素。5.目标作风胜任力:场景关联的作风胜任力,可以关联多项,如果场景包含目标作风胜任力,则可以按需使用本元素。6.目标心理胜任力:留空。7.初始位置:场景起始点飞机所处的具体位置和相关环境条件(白天或夜晚等)。8.场景描述:场景的主体描述内容,应当包括除有单独数据项内容的所有需要说明的场景内容,包括但不限于背景说明、人机环设置、实施方法和流程以及教学技巧等内容。9.飞机状况:飞机状况应该包含飞机的故障状况、MEL放行状况和其它相关状况。如果有需要说明的飞机特殊状况,则可以按需使用本元素。10.航行通告:航行通告应包含起飞机场、落地机场、备降场和航线中影响运行的航行通告。如果存在影响运行的航行通告,则按需使用本元素。11.航线数据:航线数据应该包含完整的数据内容,包括起飞机场、落地机场、航路航线、航班号等。如果场景包含航线数据,则按需使用本元素。12.性能数据:性能数据应当包含完整的数据内容,包括总重、无燃油重、燃油、备份油量、重心、成本指数等,可以参考实际舱单的主要数据项。如果场景包含性能数据,则按需使用本元素。13.天气信息:包括起飞机场、落地机场、备降场的METAR、TAF等报文和其它天气信息。如果场景包含天气信息,则按需使用本元素。14.放行信息:包括ATC放行信息和其它相关数据。如果场景包含放行信息,则按需使用本元素。15.其它备注:用于备注说明非场景的关键信息,但需要对实施者进行补充说明的相关信息内容。16.实施时间:场景的实施时长,以分钟为单位。(图示二、场景元素结构图)(二)子场景(情景)构成要素规范子场景是实现目标胜任力训练的最小数据单元,其构成要素颗粒度更细致,数据链条更密集,逻辑关系更复杂,可实现的训练目标覆盖面也更广泛,因此可以为训练内容全面丰富、训练目标精准明确、训练实施方便快捷的场景开发提供足够的数据支撑。同时子场景也是真正完成具体训练任务和实现合规性覆盖的中心载体,因此子场景开发的数据规范和标准统一,是提升场景开发质量的重要保障。子场景(情景)构成要素主要包含下列元素:1.子场景名称:用于定义子场景的名称,命名规则可以包含阶段、天气、运行等相关内容,需要考虑名称含义的准确和易懂。2.子场景代码:用于标记子场景的唯一性,命名规则可以参考TEM代码命名规则,或其它自定义规则。3.训练目标:用于说明本子场景的主要训练目标。4.目标核心胜任力:用于定义子场景所关联的核心胜任力,以及胜任力所包含的OB重点项。5.目标作风胜任力:用于定义子场景所关联的作风胜任力。6.目标心理胜任力:留空。7.飞行阶段:关联AC-138定义的飞行8个阶段,可以进行多个关联。8.气象条件:气象条件应该尽可能详细,可以进行多重天气类型关联。9.飞机位置:说明飞机所处的具体位置信息,该位置既包含飞机当前的位置,也包含后续的位置趋势。10.子场景描述:应当包括除有单独数据项内容的所有需要说明的子场景内容,包括但不限于背景说明、人机环设置、实施方法和流程、教学技巧等内容,是构造子场景和实施训练的主体描述内容。11.飞机故障:子场景关联的飞机故障信息,子场景内的飞机故障必须有明确的故障来源和相关编号(如ATA编号),并注明故障等效性参数。12.飞行科目:子场景关联的飞行科目,包括121附件E的科目内容和对应的AC-138的MV(机动飞行)科目内容,也包括自主设计的飞行科目内容。13.训练主题:子场景关联的EBT训练主题(AC-138),可以关联多个。14.分支说明:分支说明一般用于多个分支选项的前置说明,包括但不限于背景说明、人机环设置、实施方法和流程以及教学技巧等内容。15.分支选项:分支选项可能为不同的ATC指令、飞机故障、程序选择、决策预案等内容。16.教员提示:对教员提供的实施子场景训练的具体指导内容条款,包括但不限于实施方法和技巧、观察方法和技巧、评估方法和标准,以及其它教学相关提示内容。17.考察重点:必须在考察重点明确的前提下,才可以使用本元素,考察重点的内容应该是完整的、明确的、可评估的、有依据的。不应使用模糊的考察标准(例如:程序完成较好)作为考察重点。18.关联TEM:子场景关联的具体TEM项,建议关联最小层级,可以关联多项。19.手册依据:子场景所考察的处置程序、运行标准等内容的手册依据。20.实施时间:子场景的实施时长,以分钟为单位。(图示三、子场景元素结构图)三、探讨课程开发规范性的意义本文所描述的场景开发规范,均为技术层面的探讨和交流。从EBT复训实施经验来看,将课程场景构成要素标准化,会有利于EBT的实施和推进。规范性的课程开发也会有利于后续的训练数据收集和分析应用,数据驱动训练体系改革和PLM建设的效果也会更好。因此期待更多的行业资源可以推进EBT课程开发的标准化,也期待更多专业人士的交流和分享,从而逐渐达成业内共识,共同推进EBT课程开发的规范性。参考文献:[1] 《循证训练(EBT)实施方法》民航规〔2023〕17号(AC-121-QS-138R1).[2]《数据驱动的循证训练(EBT)课程研发指南》(IB-FS-OPS-007).[3]《循证培训手册》(ICAO Doc 9995).[4]《Data Report for Evidence-Based Training Amendment(2021)》 (IATA).[5]《Data Report for Evidence-Based Training》(IATA).山东航空股份有限公司 刘发凯本文已发表在《航空安全》杂志2022年第一期!
-
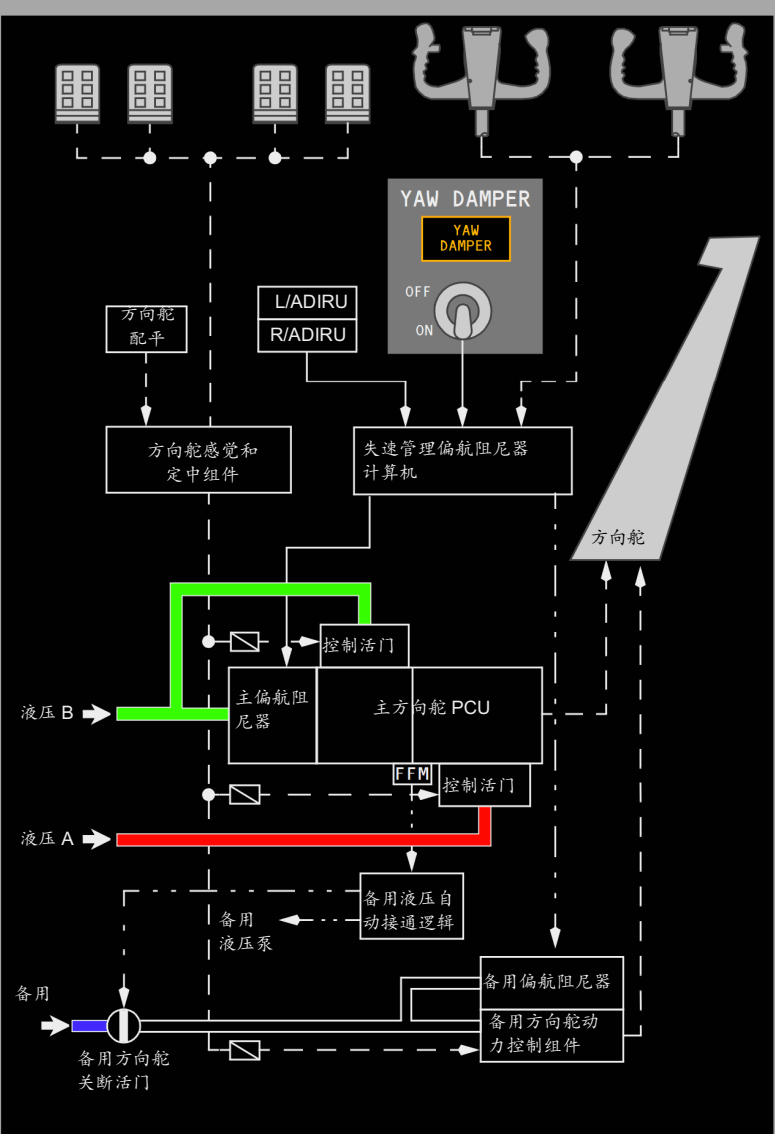
B737NG飞机STANDBY RUDDER ON灯亮的思考 哪些情况能导致STANDBY RUDDER ON灯亮,对飞行有什么影响?提问人:黄培基在B737NG飞机驾驶舱飞行控制面板上的STANDBY RUDDER ON灯正常情况下是不亮的,一旦亮了说明:备用液压泵启动并且备用方向舵关断活门打开给方向舵的备用PCU提供液压动力。那么有以下几种情况可以让STANDBY RUDDER ON灯亮。一.因为A或B液压系统失效或者人工恢复情况时执行检查单把飞行操纵( FLT CONTROL) A 或 B电门至备用方向舵( STBY RUD) 位时就启动了备用液压系统并给方向舵提供动力。二.备用液压系统的自动启动。启动条件是1、A 或/和 B 系统失效, 2、襟翼放出 ,3、空中或轮速高于 60 节, 4、飞行操纵( FLT CONTROL) 电门液压 A 或 B 系统在 ON 位。这4个条件组合就会发现是在起飞滑跑阶段或在进近阶段,这两种阶段都是飞行员处于工作高负荷阶段,为减少飞行员操作程序,如果遇到A或/和B液压失效,备用液压泵自动启动并给方向舵提供液压动力。以上两种备用液压泵启动的情况除了STANDBY RUDDER ON灯、主警戒灯、系统信号牌亮灯亮之外还有A或/和B液压系统失效灯或者飞行操纵低压灯指示。三.主 PCU(动力控制组件)内的抗力监控器( FFM:Force Fight Monitor) 跳开会启动备用液压并给方向舵提供动力。下图是方向舵系统工作简图A、B液压系统的两个PCU串联安装在一起成为主PCU,液压A、B通过控制活门给各自PCU提供动力。从备用液压泵出来的液压驱动备用方向舵PCU与A、B液压系统驱动的主方向舵PCU形成并联形式与方向舵机械相连。下面重点分析主方向舵PCU的抗力监控器(FFM)跳开的两种情况。1.主方向舵PCU的内部卡阻:FFM(抗力监控器)监控A、B两个串联PCU之间的卡阻情况,如果系统 A 或系统 B 的输入被阻塞或被切断,主方向舵PCU不能再驱动方向舵,FFM感受到内部压力超过3600PSI时,就会启动备用液压系统给方向舵提供动力,此时仅有备用液压也可以提供满意的方向舵效能。在主PCU内部卡阻时驾驶舱内除了STANDBY RUDDER ON灯、主警戒灯、系统信号牌亮没有其他灯亮。2.FFM自身原因如果主PCU内没有卡阻,而是FFM自身原因跳开导致了备用液压的启动来驱动方向舵,那么这时相当于A、B、备用液压三套液压全部加载在方向舵上,按照习惯蹬舵会产生过量偏转,所以检查单特别提醒“避免过大或突然的方向舵脚蹬输入”。驾驶舱仅有STANDBY RUDDER ON灯亮时检查单并没有区分是主PCU 的卡阻还是FFM的意外跳开。模拟机教官台的STANDBY RUDDER ON点亮科目,其表述是“The standby pump is automatically activated by the main PCU force fight monitor (FFM) and pressurizes the rudder standby PCU”。其描述是:由于主PCU的FFM原因,备用液压泵自动启动并给方向舵备用PCU增压。也没有详细说明备用液压泵的启动是因为主PCU内部卡阻还是FFM的意外跳开导致,但可以通过备用液压泵的失效(在教官台设置备用液压泵失效)来验证是哪一种情况。如果是主PCU卡阻,那么备用液压泵失效后,方向舵不能移动,如果是FFM意外跳开,那么备用液压泵失效后,方向舵可以移动。最后证明模拟机上STANDBY RUDDER ON灯亮是FFM的意外跳开造成的。参考手册:B737-800FCOM B737-800QRH B737FCTM B737-800SSM飞机维护手册 飞行培训中心 王勇
-
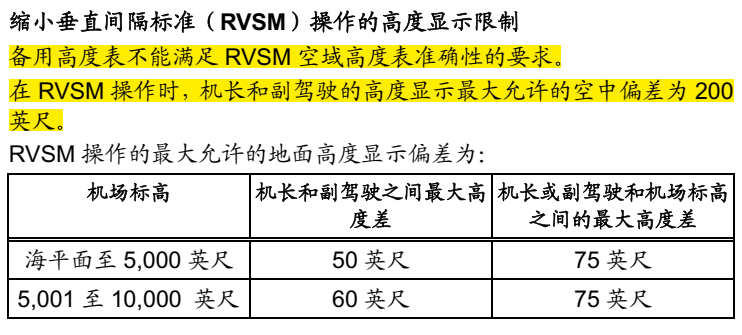
EFIS面板失效可以运行RVSM空域吗? 1、EFIS面板故障,故障一侧出现高度表故障旗的原因是什么?2、如果按照检查单执行,将控制面板选择电门放到左侧或右侧,高度表恢复正常,此时能否满足RVSM空域要求的两套独立的高度测量系统的要求?提问人:王金鹏回答问题1:EFIS面板失效后在PFD上出现琥珀色“ALT”旗和“DISPLAYS CONTROL PANEL ”信息,因为EFIS面板提供气压基准数据,所以一旦面板失效,高度表没有数据,出现故障旗。EFIS 面板失效后按照检查单要求将控制面板( CONTROL PANEL)选择电门选择到工作的控制面板,这样之前失效侧的高度表恢复高度数据。 回答问题2:按照局方《缩小垂直间隔(RVSM) 空域的运行要求》:“8.3 航空器进入 RVSM 空域前程序 航空器进入 RVSM 空域前,以下设备应当工作正常,如果有任何要求的设备失效,航空器驾驶员应当申请新的许可,以避免在该空域飞行。 (1)两套主高度测量系统 (2)一套自动高度控制系统 (3)一套高度告警系统注意:航空运营人应当确认在每一个计划运行的RVSM空域, 飞机满足装备应答机的要求。”飞机需要“两套主高度测量系统” 出于冗余要求, 如果仅有一侧高度数据显示的话,那么就不能继续在RVSM空域运行。在FCOM1的限制章节里提到:只有要求机长和副驾驶高度显示最大允许空中偏差为200英尺,没有其他要求了,左右高度差超出200英尺后就会出现高度不一致情况,高度不一致时检查单里明确了不能执行RVSM空域运行。 在公司《运行手册》RVSM运行章节对设备要求有如下描述:公司实施 RVSM 运行的飞机安装了下列高度保持设备:“1 两套独立的高度测量系统,每个系统由下列部件组成:a) 交叉耦合静压源/系统;b) 测量由静压源传感的静压,将其转换为气压高度,并显示给机组的设备;c) 为实现自动报告高度的目的,能提供与所显示的气压高度一致的数字编码信号设备;d) 静压源误差修正(SSEC),以满足 RVSM 高度系统误差要求;f) 为高度自动控制和各告警系统提供基准信号雷达应答机(SSR)。2 一套具有高度报告能力的二次监视雷达应答机。3 一套高度告警系统。4 一套自动高度控制系统。”“独立的高度测量系统部件”中没有提到EFIS面板,下面从B737NG飞机的空速、高度计算原理作分析,其原理如下图:2个EFIS面板把气压基准数据送到2个DEU里,DEU再把数据送到2个ADIRU(大气数据惯性基准组件),各自PITOT管和静压口的传感器将全压和静压数据送到各自的ADIRU,同时两侧的迎角风标送迎角数据到各自ADIRU ,总温探头(TAT)把温度数据送到2个ADIRU里,ADIRU根据气压基准数据和当前气压数据再加上马赫数修正、温度数据和迎角数据修正算出精确高度。正常情况时,两侧数据传输和计算都是独立的,一旦气压基准数据缺失时飞行员通过控制面板( CONTROL PANEL)选择电门转换到正常工作的EFIS面板后,从对侧“借”了气压基准数据,静压孔、传感器、迎角风标、温度数据以及终端的ADIRU仍然是本侧的。从属性上讲,PITOT管、静压孔、传感器、迎角风标、总温探头、ADIRU属于设备,EFIS设置的气压基准只能算是“信息”。需要补充的是:1.ADIRU是大气数据计算机部分和惯导部分的物理组合组件,一部惯导失效可以让工作的惯导数据(姿态、航向、垂速、航迹等)转换到失效侧显示,但大气数据计算机的数据(空速、高度)不会转换,如果一侧的大气数据计算机失效,工作侧的大气数据计算机不能转换。2.一部DEU失效,工作的DEU接收左右2部ADIRU的数据后左右PFD上的空速、高度显示是来自本侧的ADIRU。3.地面EFIS面板失效后MEL手册不可以放行,因为放行要求高于运行要求,空中一部EFIS面板失效会导致进近偏离SOP。综合以上分析,两侧的静压源、传感器、数据修正、仪表显示都是独立进行的,从设备上说符合要求,所以一侧EFIS面板失效后在执行完检查单后可以满足RVSM运行要求。 培训部飞行培训中心--王勇
-
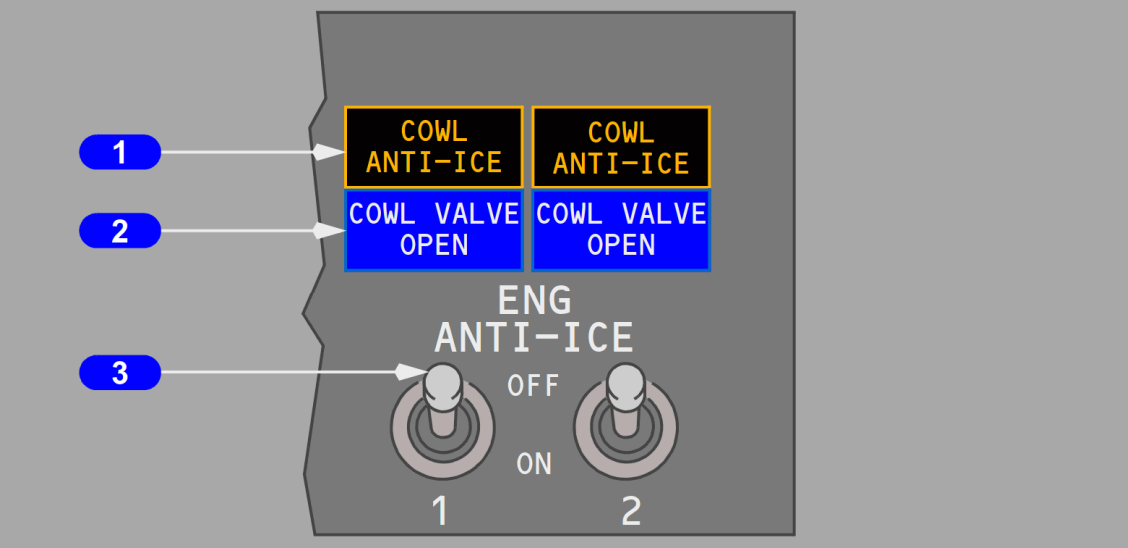
咨询波音的若干问题回复 问题1:在紧急下降检查单中要求双发油门杆减到最小或根据防冰情况按需调节,是否意味着在慢车位置不能打开发动机防冰活门?波音回复如下:RESPONSE:The intent of the step is to maintain adequate thrust to ensure the engine anti-ice valves are open. If the thrust is adequate, the COWL VALVE OPEN lights are illuminated dim and the amber TAI alert is not displayed. If the COWL VALVE OPEN lights remain illuminated bright with the engines at idle, the thrust should be increased slightly, up to a minimum of 30% N1. 这一步骤的目的是保持足够推力以确保发动机防冰活门打开,如果推力足够COWL VALVE OPEN灯是暗亮,琥珀色TAI不会显示,如果发动机在慢车时COWL VALVE OPEN灯保持明亮,推力应该缓慢增加直到最小30% N1。问题2为什么在人工恢复和飞行操纵卡阻受限检查单中不需要将TCAS模式设置 TA 或者TA only模式? 波音回复如下:RESPONSE:All non-normal checklists are evaluated on a case-by-case basis. There are no blanket criteria defining when the Transponder Mode selector must be set to TA because malfunctions are very situational. Putting the Transponder Mode selector to TA into all relevant checklists is not done because, depending on the extent of the malfunction and the conditions, there may be capability to accomplish an RA action. The probability of a severe malfunction, which limits climb capability and/or maneuverability, combined with a RA event are low enough that it does not warrant a TCAS-TA step in many checklists.所有非正常的检查表都是根据具体情况进行评估的。由于故障非常具有情境性,因此没有明确的标准来定义应答器模式选择器何时必须设置为TA。将应答器模式选择器放入所有相关的检查清单中是不可行的,因为根据故障的程度和条件,可能有能力完成RA操作。严重故障(限制爬升能力和/或机动性)与RA事件相结合的概率很低,因此在许多检查清单中不需要进行TCAS-TA步骤。问题3如果在低于飞行高度层 FL220 的爬升和下降过程中一个 DEU 失效且失效侧自动驾驶接通,• 两个飞行员飞行显示上的飞行指引仪俯仰指令杆消失• 在高度截获( ALT ACQ)时飞行指引仪俯仰指令杆重新出现• 自动驾驶接通于 CWS P 方式• 失效侧自动驾驶的高度层改变( LVL CHG), VNAV 与 V/S 不可用。如果 DEU 在飞行高度层 FL220 以上时失效,自动驾驶与飞行指引仪不受影响。为什么高度220是一个临界高度?波音回复如下:RESPONSE:FL220 is a function of the Stall Management Yaw Damper (SMYD) Computer logic. Above approximately 22,000ft, the FMC provides the minimum maneuver (buffet) speed to the autopilot, which is unaffected by a single DEU failure. Below 22,000ft, the autopilot uses the SMYD minimum maneuver speed, which is dependant on the DEU engine data. A failure of the DEU below 22,000ft prevents the autopilot from operating in pitch modes that control to airspeed or thrust.As stated above, the minimum maneuver airspeed is calculated by the SMYD computer. The buffet speed is calculated by the FMC. The SMYD computer compares the minimum maneuver airspeed with the buffet speed and transmits the higher of the two values to the FCC. At low altitudes, the minimum maneuver speed is the larger of the two. At high altitudes, the buffet speed is the larger of the two. The crossover point occurs at approximately 22,000 feet, depending on gross weight.FL220是失速管理偏航阻尼器(SMYD)计算机逻辑的功能。在大约22,000英尺以上,FMC为自动驾驶仪提供最小机动(抖振)速度,该速度不受单个DEU故障的影响。在22,000英尺以下,自动驾驶仪使用SMYD最小机动速度,这取决于DEU发动机数据。如果DEU在22,000英尺以下发生故障,自动驾驶仪将无法在控制空速或推力的俯仰模式下运行。如上所述,最小机动空速由SMYD计算机计算的。抖振速度由FMC计算。SMYD计算机将最小机动空速与冲击速度进行比较,并将两个值中的较高值发送给FCC。在低空,最小机动速度是两者中较大的。在高海拔地区,抖振速度是两者中较大的。交叉点大约在22,000英尺处,取决于总重量。