搜索到
126
篇与
的结果
-
 浅析风切变 作者: 飞行部二大队耿 跃一、背景低空风切变被称为是飞行的“无形杀手” 。有资料表明,自1943年以来,全球范围内与低空风切变相关的飞行事故导致了一千四百多人遇难。1970年至1985年期间,至少发生了30起与低空风切变相关的飞行事故,导致七百多人遇难,其中着陆28起,起飞2起。据国际民航组织(ICAO)统计,大约30%的空难由天气原因引起或者与天气因素有关,其中低空风切变是最危险的因素之一。来自美国国家运输安全委员会(NTSB)的数据表明:自1975年以来,在美国由于天气原因造成的恶性空难事故中,80%是低空风切变造成的二、风切变的介绍1.定义:风切变 : 风向或风速的快速变化严重风切变:风向或风速的快速变化导致空速的变化大于15海里/小时或垂直速度的变化大于150米(500英尺)/分钟。2、低空风切变形成的原因:低高度的风速风向变化会对飞机起降造成严重的危害,这些变化是由各种气象条件所引起的,如:地形条件,逆温现象,海陆风,锋面系统,强地面风。最严重的风切变往往伴随着雷暴和阵雨产生。1.雷暴2.微下击暴流3.其他情况:地形、锋面、海陆风等三、风切变的危害1、可控飞行撞地(CFIT)风险。机组未严格落实风切变机动改 出程序要求(推力、姿态相关要求),未使用最大推力或盲目收油 门,使飞机能量不足以改出风切变,不能形成足够的正上升率,极易造成飞机长时间处于风切变、“失速”掉高度、甚至有可控撞地风险。2、“擦尾及冲偏出跑道”风险。机组操纵飞机在大风乱流低高度阶段易进入管道效应,决断意识不强,如果机组注意力分配不当、偏差发现偏晚以及标准喊话不及时,当风切变警告发生时,机组可能会处置动作迟缓,造成飞机二次接地、擦尾以及冲偏出跑道风险。3、“五防”类风险。风切变机动飞行是复杂状态改出、是一种特情处置,如果机组未针对大风乱流天气制定风切变及复飞相关预案, 极易造成飞机突破管制员指令高度、飞错复飞程序或轨迹以及 TCAS 冲突等风险。4、“设备”类使用超限风险。风切变机动飞行处置不当,比如: 未按手册规定按压 TOGA 电门,未保持起始姿态 15°(注:低高度复飞姿态要求除外),导致飞机在风切变改出及后续复飞过程中,长时间处于姿态及油门不匹配的异常状态中,极易造成空速快速增加超过襟翼使用空速限制。5、“颠簸伤人”风险。机组在完成风切变机动改出动作时,动作粗猛,姿态、油门瞬间输出变化量过大,易造成机体结构过载以及旅 客受伤等不安全事件发生。四、ND上预测风切变显示和符号五、风切变的分类六、雷达探测原理七、探测区高度 2300 英尺以下,在飞机的起飞和着陆过程中,无论雷达打开或关闭,都会启动前视风切变功能。在启动之后,天气扫描区范围将下降到 120 度,以便更快实现天气和风切变信息的更新。在 1200 英尺以下和 5 海里范围内,在驾驶舱内显示报警信息。如果在 MAP 或 TEST 方式雷达接通并且系统探测到风切变事件,则系统显示自动变为 WX+T 方式来显示气象和风切变符号。所选范围不会自动改变。八、预测风切变抑制条件1、预测风切变报警会被实际的风切变警告(飞机在风切变中)、前视地形报警、或基于无线电高度的警报抑制。2、起飞和着陆过程中,新的预测风切变警戒报警在80海里/小时和400英尺无线电高度之间被抑制,新的警告报警在100海里/小时和50英尺的无线电高度之间被抑制。这些抑制不能消除现有的预测风切变报警。如果警告/警戒事件出现在那些边界前,警告/警戒将会保留在显示上且会出现完整的音响喊话。如图所示:这是一个关于风切变警告警戒的概述图起飞时,从起飞滑跑开始(0海里/小时)直到飞机达到80海里/小时, 警告和警戒都可用。从80海里/小时直到飞机达到100海里/小时,只有警告可用。从400英尺到1200英尺,警告和警戒都可用。从飞机达到100海里/小时直到50英尺期间所有新报警不可用。 下降时,在飞机穿过1200 英尺到 400 英尺期间,警告和警戒可用,从 400 英尺到 50 英 尺期间只有警告可用。从 50 英尺直到接地(0 英尺),所有新报警都不可用。EGPWS探测的风切变警告(WINDSHEAR)不受抑制。九、风切变的处置1、避开如确认或怀疑存在风切变,应绕飞、延迟起飞或中止进近。a)当飞行员在气象报文中看到以下信息时,需特别注意: 雷暴、强降水、扬尘、温度露点差较大(差值越大,湿度越低), 包括其它线索如阵风、温度变暖趋势、积云等。b)地面风切变探测系统c)机载风切变警告系统d)风切变的目视迹象e)飞行员报告飞行员不能过于依赖从驾驶舱目视观察来发现风切变。虽然风切变本身不会被目视观测,但是它形成的效果是可以被观测到的。1)夜晚,闪电也许是唯一的目视线索2)白天,以下线索可以为飞行员提供一定的参考:2、预防预防措施应充分考虑推力、跑道、襟翼、速度、自动设备的影响,做出合适的选择。在很多情况下,飞行员需要仔细权衡,选择当前最佳预防措施。1)起飞时,避免在阵风期间抬轮。如果VR附近遇到阵风,如空速指示迟钝或空速指示急增,瞬间延迟抬轮。这一稍微延迟抬轮可使飞机有额外的时间在阵风中加速,并且增加的空速能提高机尾离地裕度。不要过早抬轮或使用比正常抬轮率大的速率来试图离地和减小阵风的影响,因为这样会降低机尾离地裕度。按需限制驾驶盘的输入,保持机翼水平。过量使用驾驶盘增加扰流板放出量,导致机尾离地高度减小。所有这些要素提供了最大的能量,使飞机在阵风中增速的同时保持了飞机在离地时的机尾离地高度。在此点飞机处于带有侧滑的杆舵交叉状态。离地后慢慢使驾驶盘和方向舵回中,可使飞机缓慢平稳地从侧滑中改出。2)进近和着陆3、改出1)风切变警戒:2)风切变警告注:起飞滑跑过程中遇到风切变:如果在V1前遇到风切变,在V1时执行中断起飞则跑道长度可能不够。速度达到VR时,以正常速率抬轮至15度俯仰姿态。一旦升空,执行风切变脱离机动飞行。如果在接近正常抬轮速度时遇到风切变并且空速突然下降,也许剩余的跑道不足以加速至正常起飞速度。如果没有足够长的跑道让飞机停止,即使空速很低,也要在距离跑道末端至少2,000英尺处正常抬轮。在剩余跑道上需要高于正常姿态离地。确保调定最大推力。(当跑道边灯由白色变为黄色时,代表剩余跑道长度为2000英尺)3)进近中的风切变警戒ps://spot.inat.top/usr/uploads/2026/01/783817483.png4)进近中的风切变警告5)不可接受的飞行轨迹偏离不可接受的飞行轨迹偏离是指1000英尺AGL以下,正常稳定的飞行状态发生不可控制的变化,超出下列任一情况:15海里/小时指示空速500英尺/分钟垂直速度5°俯仰姿态偏离下滑道 1 个点在较长一段时间内,油门杆位置不正常。6)风切变脱离机动飞行备注:随着空速的减小,向后的带杆力会增加。在所有情况下,导致间歇抖杆或起始抖振的俯仰姿态是俯仰姿态的上限。可能要求间歇性抖杆飞行,以获得足够的地形间隔。柔和、稳定的操纵可避免俯仰姿态过量或失速。注:如果EEC在正常方式,将推力手柄前推到底可获得最大推力。如果即将触地,将推力手柄前推到底。不要超出俯仰限制指示。如果TO/GA不可用,脱开自动驾驶和自动油门,人工飞行。警告:严重风切变可能超出AFDS的性能。 准备断开自动驾驶和自动油门并人工飞行。(十)风切变的知识点1、风切变中指引的工作原理自动驾驶仪与飞行指引仪,提供可靠的修正动作,来抵消大多数风切变。自动油门系统用对速度的任何增、减提供快速响应的方法,也对风切变改出进行支援。一般飞行员会认为指令的动力等级超出必要值,但实际上是情况所需要的动力。起飞或复飞当用F/D起飞或复飞时,如遭遇风切变,F/D俯仰指令杆将提供指令以保持目标速度,直到垂直速度降至约+600英尺/分钟。此时,F/D俯仰杆指令15度上仰姿态。如垂直速度继续下降,F/D继续指令一个15度的俯仰姿态,直到达到大约的抖杆速度。它随后指令俯仰姿态,这将导致抖杆器间断性的工作。在飞机通过风切变的情况时,F/D程序将被颠倒过来。当爬升率增至高于约+600英尺/分钟,F/D指令俯仰姿态,其结果是加速回到目标速度。当A/P或F/D复飞时,A/P与F/D二者均以类似的方式工作。进近和着陆当做ILS进近时,如遭遇风切变,F/D与A/P均力图保持飞机高度或在截获下滑道后保持下滑道,而不考虑迎角或抖杆器的限制。如果飞行员不采取按压TO/GA电门或断开自动驾驶而进行人工飞行的干涉措施,空速可能会低于抖杆速度并且进入失速。2、风切变机动飞行时,如何判断飞机脱离风切变?PFD上的目视警告显示是否可以作为相应的依据PFD上显示的“WIND SHEAR”目视警告信息,在1500ft AGL下激活显示,语音报警只激活一次,但是目视警告信息会一直持续到飞机脱离该次风切变;该警告信息一旦1500英尺一下被激活,在整个风切变改出机动飞行中都有效,尽管高度已经突破1500ft AGL。该目视警告信息可作为脱离风切变的参考依据之一,但不可以作为唯一依据,建议必须还要根据飞机的实际飞行状态进行综合判断,因为前方的飞行条件未知,飞机有可能会进入另一个风切变。综合波音意见和手册信息,脱离风切变后的操作:风切变警告消失后(包括驾驶舱语音警告和 PFD下方红色WINDSHEAR目视警告),不可接受的飞行轨迹偏离不再继续,并且速度和上升率开始明显增加,机组确认飞机正在恢复正常飞行时,可认为飞机已脱离风切变:3.进近风切变(防止襟翼超速)4、脱离风切变后的机动飞行动作风切变机动飞行时超出襟翼限制速度是可接受的,脱离风切变以后进行正常的复飞动作程序,经证实,脱离风切变后增速收襟翼时,波音不建议收油门来避免超速的情况,特别是在高度较低时,因为前方气象条件未知,有可能会使飞机进入另一个风切变,只是及时的控制飞机姿态,根据速度收襟翼,根据正上升率收起落架执行正常的复飞程序。5、起飞滑跑时遭遇顺风切变,空速不增加,飞行员延迟抬轮时机,最晚于跑道末端2000ft时抬轮,这样在高原机场大重量高温时,很容易造成轮胎超速,该如何应对?首先是跑道末端2000ft英尺抬轮,对于足够长的跑道,不一定要到跑道末端2000英尺速度就满足了,但是对于超轮速的情况,波音性能代表和飞行员的相关解释是飞机的轮速涉及已经考虑到该问题,飞机的验证限制大约达到当前轮速限制的1.4倍左右,确定可以提供足够的安全裕度,起飞后正常执行程序即可。爆胎的情况,飞行员可以第一时间感觉到,所以当出现爆胎的情况时,建议飞行员根据实际状态选择是否收上起落架。6、非正常机动飞行-风切变 “改平机翼的同时抬机头至起始俯仰姿态15°”,如何理解“起始俯仰姿态15°?是始终保持还是要参考升降速度指示,在低高度和高高度有什么区别? 检查单机动飞行章节很明确,按检查单执行。15°为起始姿态,不是要求始终保持15°姿态,风切变改出允许间歇性抖杆,不能持续抖杆。在临界的低高度情况下,如果可能以空速换取高度。
浅析风切变 作者: 飞行部二大队耿 跃一、背景低空风切变被称为是飞行的“无形杀手” 。有资料表明,自1943年以来,全球范围内与低空风切变相关的飞行事故导致了一千四百多人遇难。1970年至1985年期间,至少发生了30起与低空风切变相关的飞行事故,导致七百多人遇难,其中着陆28起,起飞2起。据国际民航组织(ICAO)统计,大约30%的空难由天气原因引起或者与天气因素有关,其中低空风切变是最危险的因素之一。来自美国国家运输安全委员会(NTSB)的数据表明:自1975年以来,在美国由于天气原因造成的恶性空难事故中,80%是低空风切变造成的二、风切变的介绍1.定义:风切变 : 风向或风速的快速变化严重风切变:风向或风速的快速变化导致空速的变化大于15海里/小时或垂直速度的变化大于150米(500英尺)/分钟。2、低空风切变形成的原因:低高度的风速风向变化会对飞机起降造成严重的危害,这些变化是由各种气象条件所引起的,如:地形条件,逆温现象,海陆风,锋面系统,强地面风。最严重的风切变往往伴随着雷暴和阵雨产生。1.雷暴2.微下击暴流3.其他情况:地形、锋面、海陆风等三、风切变的危害1、可控飞行撞地(CFIT)风险。机组未严格落实风切变机动改 出程序要求(推力、姿态相关要求),未使用最大推力或盲目收油 门,使飞机能量不足以改出风切变,不能形成足够的正上升率,极易造成飞机长时间处于风切变、“失速”掉高度、甚至有可控撞地风险。2、“擦尾及冲偏出跑道”风险。机组操纵飞机在大风乱流低高度阶段易进入管道效应,决断意识不强,如果机组注意力分配不当、偏差发现偏晚以及标准喊话不及时,当风切变警告发生时,机组可能会处置动作迟缓,造成飞机二次接地、擦尾以及冲偏出跑道风险。3、“五防”类风险。风切变机动飞行是复杂状态改出、是一种特情处置,如果机组未针对大风乱流天气制定风切变及复飞相关预案, 极易造成飞机突破管制员指令高度、飞错复飞程序或轨迹以及 TCAS 冲突等风险。4、“设备”类使用超限风险。风切变机动飞行处置不当,比如: 未按手册规定按压 TOGA 电门,未保持起始姿态 15°(注:低高度复飞姿态要求除外),导致飞机在风切变改出及后续复飞过程中,长时间处于姿态及油门不匹配的异常状态中,极易造成空速快速增加超过襟翼使用空速限制。5、“颠簸伤人”风险。机组在完成风切变机动改出动作时,动作粗猛,姿态、油门瞬间输出变化量过大,易造成机体结构过载以及旅 客受伤等不安全事件发生。四、ND上预测风切变显示和符号五、风切变的分类六、雷达探测原理七、探测区高度 2300 英尺以下,在飞机的起飞和着陆过程中,无论雷达打开或关闭,都会启动前视风切变功能。在启动之后,天气扫描区范围将下降到 120 度,以便更快实现天气和风切变信息的更新。在 1200 英尺以下和 5 海里范围内,在驾驶舱内显示报警信息。如果在 MAP 或 TEST 方式雷达接通并且系统探测到风切变事件,则系统显示自动变为 WX+T 方式来显示气象和风切变符号。所选范围不会自动改变。八、预测风切变抑制条件1、预测风切变报警会被实际的风切变警告(飞机在风切变中)、前视地形报警、或基于无线电高度的警报抑制。2、起飞和着陆过程中,新的预测风切变警戒报警在80海里/小时和400英尺无线电高度之间被抑制,新的警告报警在100海里/小时和50英尺的无线电高度之间被抑制。这些抑制不能消除现有的预测风切变报警。如果警告/警戒事件出现在那些边界前,警告/警戒将会保留在显示上且会出现完整的音响喊话。如图所示:这是一个关于风切变警告警戒的概述图起飞时,从起飞滑跑开始(0海里/小时)直到飞机达到80海里/小时, 警告和警戒都可用。从80海里/小时直到飞机达到100海里/小时,只有警告可用。从400英尺到1200英尺,警告和警戒都可用。从飞机达到100海里/小时直到50英尺期间所有新报警不可用。 下降时,在飞机穿过1200 英尺到 400 英尺期间,警告和警戒可用,从 400 英尺到 50 英 尺期间只有警告可用。从 50 英尺直到接地(0 英尺),所有新报警都不可用。EGPWS探测的风切变警告(WINDSHEAR)不受抑制。九、风切变的处置1、避开如确认或怀疑存在风切变,应绕飞、延迟起飞或中止进近。a)当飞行员在气象报文中看到以下信息时,需特别注意: 雷暴、强降水、扬尘、温度露点差较大(差值越大,湿度越低), 包括其它线索如阵风、温度变暖趋势、积云等。b)地面风切变探测系统c)机载风切变警告系统d)风切变的目视迹象e)飞行员报告飞行员不能过于依赖从驾驶舱目视观察来发现风切变。虽然风切变本身不会被目视观测,但是它形成的效果是可以被观测到的。1)夜晚,闪电也许是唯一的目视线索2)白天,以下线索可以为飞行员提供一定的参考:2、预防预防措施应充分考虑推力、跑道、襟翼、速度、自动设备的影响,做出合适的选择。在很多情况下,飞行员需要仔细权衡,选择当前最佳预防措施。1)起飞时,避免在阵风期间抬轮。如果VR附近遇到阵风,如空速指示迟钝或空速指示急增,瞬间延迟抬轮。这一稍微延迟抬轮可使飞机有额外的时间在阵风中加速,并且增加的空速能提高机尾离地裕度。不要过早抬轮或使用比正常抬轮率大的速率来试图离地和减小阵风的影响,因为这样会降低机尾离地裕度。按需限制驾驶盘的输入,保持机翼水平。过量使用驾驶盘增加扰流板放出量,导致机尾离地高度减小。所有这些要素提供了最大的能量,使飞机在阵风中增速的同时保持了飞机在离地时的机尾离地高度。在此点飞机处于带有侧滑的杆舵交叉状态。离地后慢慢使驾驶盘和方向舵回中,可使飞机缓慢平稳地从侧滑中改出。2)进近和着陆3、改出1)风切变警戒:2)风切变警告注:起飞滑跑过程中遇到风切变:如果在V1前遇到风切变,在V1时执行中断起飞则跑道长度可能不够。速度达到VR时,以正常速率抬轮至15度俯仰姿态。一旦升空,执行风切变脱离机动飞行。如果在接近正常抬轮速度时遇到风切变并且空速突然下降,也许剩余的跑道不足以加速至正常起飞速度。如果没有足够长的跑道让飞机停止,即使空速很低,也要在距离跑道末端至少2,000英尺处正常抬轮。在剩余跑道上需要高于正常姿态离地。确保调定最大推力。(当跑道边灯由白色变为黄色时,代表剩余跑道长度为2000英尺)3)进近中的风切变警戒ps://spot.inat.top/usr/uploads/2026/01/783817483.png4)进近中的风切变警告5)不可接受的飞行轨迹偏离不可接受的飞行轨迹偏离是指1000英尺AGL以下,正常稳定的飞行状态发生不可控制的变化,超出下列任一情况:15海里/小时指示空速500英尺/分钟垂直速度5°俯仰姿态偏离下滑道 1 个点在较长一段时间内,油门杆位置不正常。6)风切变脱离机动飞行备注:随着空速的减小,向后的带杆力会增加。在所有情况下,导致间歇抖杆或起始抖振的俯仰姿态是俯仰姿态的上限。可能要求间歇性抖杆飞行,以获得足够的地形间隔。柔和、稳定的操纵可避免俯仰姿态过量或失速。注:如果EEC在正常方式,将推力手柄前推到底可获得最大推力。如果即将触地,将推力手柄前推到底。不要超出俯仰限制指示。如果TO/GA不可用,脱开自动驾驶和自动油门,人工飞行。警告:严重风切变可能超出AFDS的性能。 准备断开自动驾驶和自动油门并人工飞行。(十)风切变的知识点1、风切变中指引的工作原理自动驾驶仪与飞行指引仪,提供可靠的修正动作,来抵消大多数风切变。自动油门系统用对速度的任何增、减提供快速响应的方法,也对风切变改出进行支援。一般飞行员会认为指令的动力等级超出必要值,但实际上是情况所需要的动力。起飞或复飞当用F/D起飞或复飞时,如遭遇风切变,F/D俯仰指令杆将提供指令以保持目标速度,直到垂直速度降至约+600英尺/分钟。此时,F/D俯仰杆指令15度上仰姿态。如垂直速度继续下降,F/D继续指令一个15度的俯仰姿态,直到达到大约的抖杆速度。它随后指令俯仰姿态,这将导致抖杆器间断性的工作。在飞机通过风切变的情况时,F/D程序将被颠倒过来。当爬升率增至高于约+600英尺/分钟,F/D指令俯仰姿态,其结果是加速回到目标速度。当A/P或F/D复飞时,A/P与F/D二者均以类似的方式工作。进近和着陆当做ILS进近时,如遭遇风切变,F/D与A/P均力图保持飞机高度或在截获下滑道后保持下滑道,而不考虑迎角或抖杆器的限制。如果飞行员不采取按压TO/GA电门或断开自动驾驶而进行人工飞行的干涉措施,空速可能会低于抖杆速度并且进入失速。2、风切变机动飞行时,如何判断飞机脱离风切变?PFD上的目视警告显示是否可以作为相应的依据PFD上显示的“WIND SHEAR”目视警告信息,在1500ft AGL下激活显示,语音报警只激活一次,但是目视警告信息会一直持续到飞机脱离该次风切变;该警告信息一旦1500英尺一下被激活,在整个风切变改出机动飞行中都有效,尽管高度已经突破1500ft AGL。该目视警告信息可作为脱离风切变的参考依据之一,但不可以作为唯一依据,建议必须还要根据飞机的实际飞行状态进行综合判断,因为前方的飞行条件未知,飞机有可能会进入另一个风切变。综合波音意见和手册信息,脱离风切变后的操作:风切变警告消失后(包括驾驶舱语音警告和 PFD下方红色WINDSHEAR目视警告),不可接受的飞行轨迹偏离不再继续,并且速度和上升率开始明显增加,机组确认飞机正在恢复正常飞行时,可认为飞机已脱离风切变:3.进近风切变(防止襟翼超速)4、脱离风切变后的机动飞行动作风切变机动飞行时超出襟翼限制速度是可接受的,脱离风切变以后进行正常的复飞动作程序,经证实,脱离风切变后增速收襟翼时,波音不建议收油门来避免超速的情况,特别是在高度较低时,因为前方气象条件未知,有可能会使飞机进入另一个风切变,只是及时的控制飞机姿态,根据速度收襟翼,根据正上升率收起落架执行正常的复飞程序。5、起飞滑跑时遭遇顺风切变,空速不增加,飞行员延迟抬轮时机,最晚于跑道末端2000ft时抬轮,这样在高原机场大重量高温时,很容易造成轮胎超速,该如何应对?首先是跑道末端2000ft英尺抬轮,对于足够长的跑道,不一定要到跑道末端2000英尺速度就满足了,但是对于超轮速的情况,波音性能代表和飞行员的相关解释是飞机的轮速涉及已经考虑到该问题,飞机的验证限制大约达到当前轮速限制的1.4倍左右,确定可以提供足够的安全裕度,起飞后正常执行程序即可。爆胎的情况,飞行员可以第一时间感觉到,所以当出现爆胎的情况时,建议飞行员根据实际状态选择是否收上起落架。6、非正常机动飞行-风切变 “改平机翼的同时抬机头至起始俯仰姿态15°”,如何理解“起始俯仰姿态15°?是始终保持还是要参考升降速度指示,在低高度和高高度有什么区别? 检查单机动飞行章节很明确,按检查单执行。15°为起始姿态,不是要求始终保持15°姿态,风切变改出允许间歇性抖杆,不能持续抖杆。在临界的低高度情况下,如果可能以空速换取高度。 -
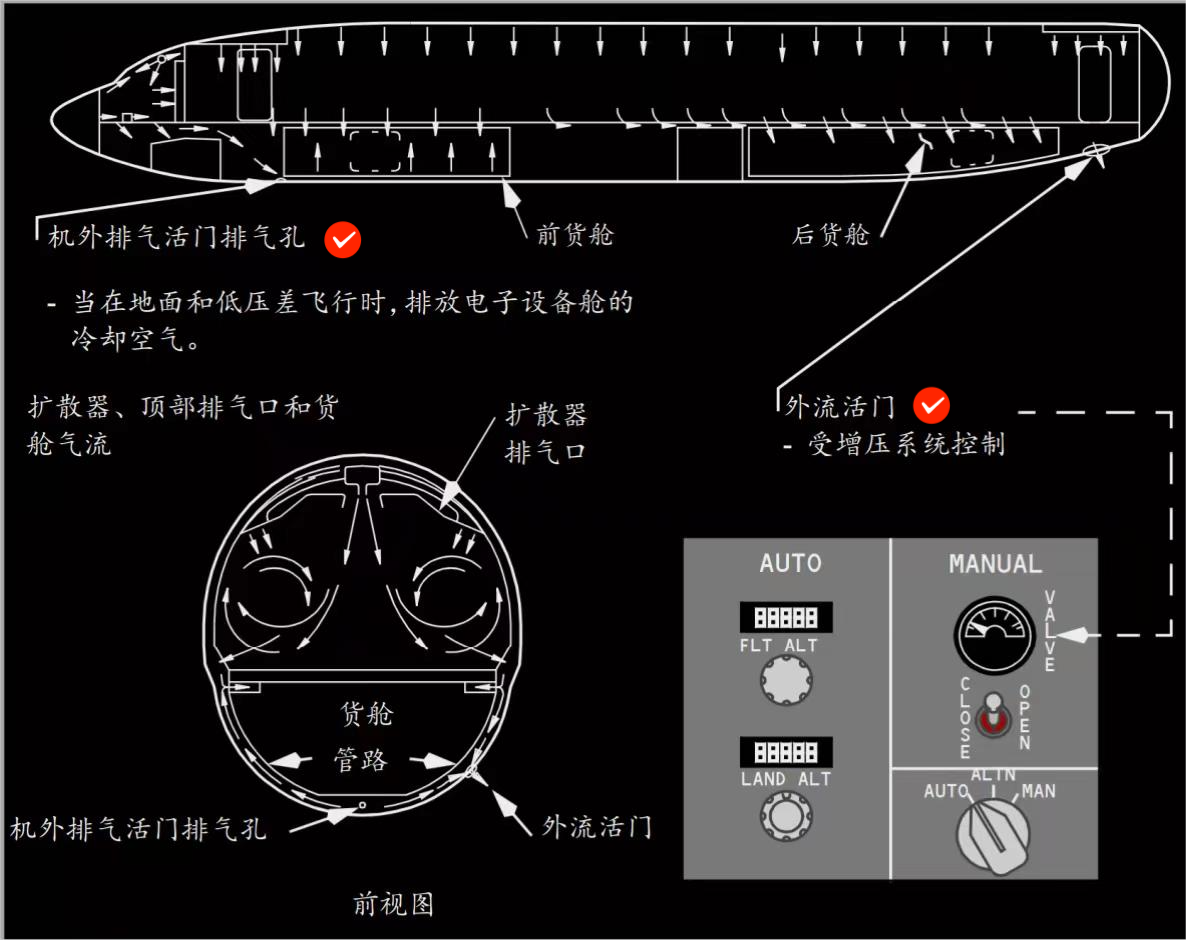
关于737NG“冒烟着火或冒毒雾”和“排烟或排毒雾”检查单的处置分析 CHECKLIST OF(SMOKE,FIRE OR FUMES)&(SOMKE OR FUMES REMOVAL) 作者:飞行部六大队王永刚前言:民用航空器空中发生冒烟着火是严重事故征候,如果不能正确及时处置,必然会导致严重飞行事故。民用航空器空中发生不明原因的“冒烟着火或冒毒雾”等事件,因其具体情况,紧迫程度和烟火发生的部位不同,导致处置步骤,难度和飞行机组的工作负荷会有明显的区别,一旦情况恶化,需要就近合适机场着陆,甚至立即着陆。期间还可能出现客舱秩序混乱,严重影响飞机重心,平衡的情况,此时飞行机组必须正确判断,快速处置特情,在保证飞行安全的前提下最大程度避免或降低机上人员生命财产损失。此类事件在过去并不多见,但是将来未必不会发生,所以必须对此予以足够的重视。然而在日常的模拟机训练当中,因为飞机结构,系统复杂,使得不明原因的“冒烟着火,冒毒雾”场景难以模拟,致使相关的训练很难达到好的效果。如果不能理解熟悉该检查单的处置思路和步骤,则执行检查单时难免会出纰漏,反而在关键时刻不能有效化解危险。以737NG飞机为例,波音公司在《快速检查单QRH》中所提供的“冒烟着火或冒毒雾”和“排烟或排毒雾”检查单以及相关手册中,对于该检查单中部分关键步骤缺乏必要的说明,这种情况不利于飞行机组对该检查单的理解和执行。本文结合737NG飞机“冒烟着火或冒毒雾”,“排烟或排毒雾”检查单和《机组使用手册FCOM》及《飞机飞行手册AFM》,《机组训练手册FCTM》等,就不明原因的“冒烟着火,冒毒雾”情况,及其可能发生的部位,原因以及处置原则和思路做重点分析,火情可见可控的情况不在本文讨论范围。▉ “冒烟着火,冒毒雾”发生的可能部位和原因及危害:①由电子舱内部,驾驶舱仪表背侧,电器设备和跳开关(CB)面板背侧及相关电路,因短路,过热,静电导致燃烧等原因引起。◆危害:导致驾驶舱仪表显示,设备故障,影响导航,通讯,飞行管理控制等系统,同时严重的烟火,毒雾会危及到飞行安全和机上人员生命等。②由客舱用电设备及相关电路因短路,过热,静电导致燃烧等引起。 ◆危害:客舱设备,机体受损,舱内人员生命受到威胁。③由APU,发动机引气管道及空调系统管道,因燃油或滑油等泄漏后引起。 ◆危害:座舱设备,机体部件受损,舱内人员生命受到威胁。④其它原因。▉ ※ 处置原则:在保证飞行安全的前提下,最大限度避免或降低机上人员和财产的损失。▉ “冒烟着火或冒毒雾”检查单处置步骤:1)考虑备降;机组佩戴氧气面罩和防烟护目镜,建立驾驶舱和客舱通讯。(当驾驶舱烟雾时,机组佩戴氧气面罩和防烟护目镜应当及时并规范佩戴!)注:检查单中未提到旅客氧气面罩的使用,因使用旅客氧气时遇明火,烟雾,或静电等潜在火源时,引发客舱起火的风险势必急剧增加。然而不使用旅客氧气,座舱内的烟或毒雾同样会危及到机组和旅客生命安全。为最大限度降低因烟雾导致的危害,所以检查单内多次要求:当烟和毒雾变成最大威胁时,执行“排烟或排毒雾”检查单”。2)如可能因客舱电气设备(如厨房电器,客舱娱乐,灯光等设备及相关电路)引起,则隔离并断开相关电器设备或电路,视情况拔跳开关(CB),根据后续发展情况判断冒烟着火部位,做断电处置。如烟或毒雾成最大威胁,执行“排烟或排毒雾”检查单,同时就近合适机场落地3)驾驶舱或电子舱烟雾;如果因飞行仪表背侧,电气设备面板或跳开关(CB)面板背侧电路或电器引燃,导致驾驶舱内着火烟雾,或者电子舱内烟雾扩散至驾驶舱。此时既无法灭火也难以判断烟火源头位置,如烟雾过度只能设法排烟,在此情况下因有潜在的火源,机组佩戴氧气面罩时必须注意及时并且规范佩戴。驾驶舱及电子舱设备属于飞行关键设备,直接危及飞行安全,排烟的同时就近合适机场落地。4)如可能因空调系统引气引起的烟雾,则隔离引气管道,分别关闭一侧空调组件以判断是某单个空调组件引气问题,或者双空调组件均冒烟或毒雾,如烟或毒雾成最大威胁,执行“排烟或排毒雾”检查单。在双空调组件均冒烟雾或者因空调引气导致客舱内燃烧,烟雾加剧的情况下,就近合适机场立即落地。▉关于“排烟或排毒雾”检查单:不难看出“冒烟着火或冒毒雾”及“排烟或排毒雾”其实是一个检查单,其中包括的判断,处置步骤较多。如果把二者合并,则检查单过于繁琐且复杂,不利于操作。在执行“排烟或排毒雾”检查单之前应当已经完成“冒烟着火或冒毒雾”检查单中的相关步骤,即隔离,关闭相关用电设备和电路(切断烟火源头);关闭再循环风扇(为电子舱设置排烟形态做准备,同时降低电子舱烟雾经引气总管再次进入客舱的流量),然后“排烟或排毒雾”,否则难以达到预期的排烟效果。综合归纳《飞行机组使用手册FCOM》“气源系统”章节内容可知:①:【座舱增压系统使用空调提供的和分配的引气,通过调节外流活门(OUTFLOW VALVE)和机外排气活门(OVERBOARD EXHAUST VALVE)的开合,控制座舱增压和通风。】注:增加座舱通风即排烟形态,而减小座舱压差的同时可以增加座舱内通风。②:【当调定增压面板上着陆高度超过根据压差限制值确定的目标座舱高度时,增压控制器控制座舱高度略低于所调定的着陆高度。】例: 增压面板着陆高度调10000英尺,则自动增压系统控制座舱高度略低于10000英尺,自动增压控制器增大外流活门开度,适度给座舱释压,在减小机体内外压差的同时可以增加座舱通风以排烟。③:【在地面或空中低压差时(压差低于何值为低压差,对此波音手册中未给出相关数据);或者再循环风扇关,同时工作的空调组件高流量时,机外排气活门打开,排出经设备冷却排气管道风扇收集的电子舱和驾驶舱电气设备暖气或烟雾】。注:外流活门在机身尾部与后货舱连通,通过增压控制器自动或人工方式控制其开关,从而控制座舱增压和通风。而机外排气活门所在的排气孔位置较隐蔽,在机腹前方电子舱后部,与设备冷却系统排气管相连接并与前货舱连通,必要时,如驾驶舱或电子舱烟雾情况严重,可打开排气活门以排出电子舱或驾驶舱设备烟雾。该活门在驾驶舱内没有单独控制电门,其位置和开启条件如下:下图为:增压,外流示意图,(外流活门&机外排气活门位置)▉ 机外排气活门开启条件:1: 地面和空中低压差时。或:2: 再循环风扇关,任一工作的空调组件高流量。▉ 空中低压差条件:例1:座舱增压可控,任一空调组件工作,增压面板着陆高度调定10000尺,则增压控制器调整座舱高度略低于10000尺。或:例2:任一空调组件工作,外流活门人工全开,客舱释压,压差低至0。▉ 空调组件高流量条件:1:双发工作且工作的组件电门HIGH 位。或:2:空中,襟翼收上,两个组件AUTO位 ,双发引气电门ON时,如果一台发动机失效,或一个空调组件失效,或组件电门OFF位时 则另一个组件自动转为高流量。综上所述:当在空中任一空调组件工作,座舱增压可以控制的情况下,降低座舱内外压差,增加座舱高度的同时,可以利用空调引气增加座舱通风。另外在:①空中低压差,或; ②再循环风扇关,工作的空调组件高流量时,机外排气活门打开,排出经设备冷却排气管道风扇收集的电子仓和驾驶舱电气设备暖气或烟雾。结合“排烟或排毒雾”检查单可知:在完成“冒烟着火或冒毒雾”检查单相关步骤后,驾驶舱,客舱以及电子舱的烟雾可在以下三种情况下排出;1)两个空调组件都关闭,(非增压状态且增压无法控制,因无空调引气):◆如烟或毒雾在驾驶舱内,可在建立正常的等待速度后打开副驾驶一侧侧窗,利用外部冲压空气排烟。(推荐在安全高度时使用此方法)◆如烟或毒雾在客舱内,检查单结束,尽快落地以降低烟或毒雾对客舱旅客的生命威胁。(此时因无空调引气或外部冲压空气而无法有效给客舱通风排烟。)2)在安全高度(14000尺或以上),一个或两个组件在自动位,(自动增压状态,有空调引气)◆工作的空调组件高流量,着陆高度调10000尺,此时:①着陆高度调10000尺,增压控制器增加流活门开度以控制座舱高度略低于10000尺,空中低压差,客舱通风量增加形成排烟形态,经外流活门排出座舱烟雾。②再循环风扇关,襟翼收上,任一工作的空调组件高流量,空中低压差,机腹前下方的机外排气活门打开,排出电子仓,驾驶舱设备烟雾。3)在安全高度(14000尺以下),一个或两个工作的组件高流量,外流活门人工全开,(非增压状态,人工增压可控,有空调引气): ◆工作的组件高流量,再循环风扇关,压差低至0,此时:①客舱通风量最大以排烟,客舱烟雾经后货舱再由外流活门排出座舱烟雾。②机外排气活门打开,排出经设备排气管道风扇收集的电子仓和驾驶舱电气设备烟雾。结论:在执行“冒烟着火冒毒雾”,“排烟或排毒雾”检查单时,基本遵循“隔离,关闭判断,处置”的次序原则,当舱内烟雾威胁严重,尽快落地的同时,为降低烟雾造成的危害,应当“排烟”。然而如果不能熟悉“排烟”的方法和思路,很可能在某些复杂情况下(如烟雾严重甚至多处冒烟雾)执行检查单时,在两个检查单之间切换过程中出现混乱,甚至错误。反而不利于问题的解决。尽可能不在排烟的同时放下旅客氧气面罩就“排烟或排毒雾”而言,最佳的方法是在座舱增压可控时,下降到安全高度(14000尺以下),“外流活门”在人工方式全开,使客舱释压,内外贯通,最大限度利用空调引气增加座舱通风以排烟;同时可以打开“机外排气活门”,排出驾驶舱和电子舱烟雾。当不能下降到安全高度时,调定着陆高度10000尺,通过自动增压控制器增大“外流活门”开度,给座舱适度释压,减小压差并保持所需的客舱高度,增加通风以排出客舱烟雾。同时可以打开“机外排气活门”排出驾驶舱和电子舱烟雾。如压差不够小,可争取下降至安全高度之上某一较低的高度,以确保压差足够小。737NG《快速检查单QRH》中“冒烟着火或冒毒雾”,“排烟或排毒雾”检查单的处置步骤基本覆盖了驾驶舱,客舱和电子舱不明原因冒烟,着火情况的针对措施,但是对于“双空调组件关闭时客舱烟雾”的处置没有给出必要的说明,在不能立即落地的情况下,客舱内烟雾对于人员的危害是不得不考虑的问题,此时如果条件允许,飞行机组应当考虑客舱的排烟,以及如何排烟。通常情况下,空调组件引气导致的烟雾不会太严重,因为引气管道内没有足够的燃烧物质和条件,然而当双空调组件均因为冒烟雾严重,或者因空调引气(助燃)导致客舱燃烧,烟雾加剧而必须关闭却是最极端危险的情况,此时客舱无法利用空调引气供氧,增压,通风排烟,而舱内烟雾不能及时排出无疑会危及人员生命甚至导致客舱内秩序混乱,使得情况加剧恶化 。笔者认为应当避免客舱烟雾严重的情况下,双组件关闭后同时旅客氧气面罩自动放出(座舱高度达到14000尺)在这种情况下应本着两害相权取其轻的原则,视情况在改航备降下降高度时尽量保留一个空调组件工作以通风排烟。为避免客舱内烟雾严重同时旅客氧气面罩因客舱高度过高而自动放出,使客舱发生火情,可酌情在客舱烟雾未能充分排出前下降到安全高度以下(737NG飞机座舱高度14000尺,旅客氧气面罩自动放出)如果双空调组件必须关闭,而客舱烟雾依然严重时,可人工打开外流活门利用座舱当前压差排烟。在确保客舱内没有燃烧源的情况下,酌情使用旅客氧气给旅客供氧。(当然,当客舱高度达到14000尺时,旅客氧气面罩会自动脱落)当飞行中出现不明原因的“冒烟着火或冒毒雾”一类情况,因其发生发展的复杂性和紧迫程度以及对后续飞行的不利影响,建议机组及时宣布紧急状况,并考虑就近合适机场落地。
-
咨询波音有关中央燃油泵的问题 FROM: THE BOEING COMPANYTO: Shandong Airlines (SHG)[MESSAGE NUMBER:SHG-SHG-25-0862-03B] Boeing ResponseMESSAGE DATE: 24-Dec-2025 08:40 (GMT-08:00) Pacific Standard Time (America/Los_Angeles) / 24-Dec-2025 16:40 (GMT)================================================================================问题描述:在起飞滑跑过程中,如果中央油箱燃油量低于 453 kg(1000 lb),是否有可能出现相应中央油箱燃油泵低压灯(LOW PRESSURE)亮起,并随后触发主警戒(MASTER CAUTION)信号?此外,当中央油箱燃油量低于该阈值时,飞机的起飞构型逻辑或某个特定的抑制功能,是否会抑制与中央油箱燃油泵低压相关的主警戒/警告提示?回复:是的,如果中央油箱燃油量低于 453 kg,在起飞滑跑过程中,由于油箱内燃油移动,相关中央油箱燃油泵低压灯有可能亮起。然而,主警戒灯(MASTER CAUTION)与燃油系统指示灯的亮起,需要燃油泵持续产生低压,并且 LOW PRESSURE 灯持续稳定亮 10 秒或更长时间。在起飞阶段,这一条件可能发生,也可能不发生。因此,是否触发主警戒信号,取决于当时情况。飞机的起飞构型逻辑中,并不包含在中央油箱燃油量低于该阈值时,抑制与中央油箱燃油泵低压相关主警戒的抑制功能。同时,也没有专门设计用于抑制与中央油箱燃油泵低压相关主警戒的特定抑制功能。中央油箱燃油泵低压引起主警戒的逻辑如下:当两个中央油箱燃油泵电门均在 ON 位,并且两台泵都持续产生低压时,如果两个 LOW PRESSURE 灯持续稳定亮 10 秒或更长时间,则会亮起 MASTER CAUTION 以及 Fuel System Annunciator 指示灯。当一台中央油箱燃油泵选择 OFF,而另一台泵持续产生低压时,如果该泵的 LOW PRESSURE 灯持续稳定亮 10 秒或更长时间,同样会亮起 MASTER CAUTION 和 Fuel System Annunciator 指示灯。设定这一 10 秒延时的目的是,为了防止在最低燃油量条件下,由于加速(如起飞)或减速导致的不必要主警戒显示。在进行再现(RECALL)时,若一侧 LOW PRESSURE 灯稳定亮,则在 RECALL 时 Fuel System Annunciator 指示灯会亮起。中央油箱燃油泵必须存在持续低压(导致 LOW PRESSURE 灯稳定亮),持续 10 秒或更长时间,才会亮起 MASTER CAUTION 和 Fuel System Annunciator 指示灯。如果中央油箱燃油泵仅发生瞬时低压(LOW PRESSURE 灯闪烁、不稳定),则不会触发主警戒系统信号。中央油箱燃油泵低压探测,基于燃油泵入口未被燃油完全覆盖,从而导致泵入口吸入空气(汽蚀),引起中央油箱燃油泵出口压力降低。不存在一个明确的中央油箱燃油量数值可以与汽蚀发生直接对应。泵入口暴露可能由于:— 起飞加速— 持续转弯— 爬升/下降姿态变化— 飞机倾斜— 地面机头下俯姿态在不同燃油量情况下都可能发生(运营中观察到:燃油量低至 0 kg 以及高至 500 kg 时均有发生低压指示的情况)。只要 LOW PRESSURE 灯稳定亮 10 秒或以上,在任何飞行阶段都可能触发 MASTER CAUTION,包括起飞阶段。QRH 中没有更多额外信息,其目的主要是为机组提供处理步骤。以下为 FCOM 燃油系统描述节选:Fuel Pumps每个油箱配有两台交流电驱动燃油泵,燃油在通过泵体时提供冷却与润滑。中央油箱燃油泵输出压力高于主油箱燃油泵,以确保在所有燃油泵工作情况下,优先使用中央油箱燃油。每台泵由独立压力传感器监控。当某个泵的传感器检测到低输出压力后,该中央油箱燃油泵将在一个短暂延时后自动关闭。注:当燃油量较低,且飞机处于爬升、下降或地面机头下俯姿态时,燃油泵 LOW PRESSURE 灯可能闪烁。注:当燃油量较低,中央油箱燃油泵 LOW PRESSURE 灯在巡航中也可能闪烁。由于飞机姿态和泵入口位置存在微小差异,可能一侧比另一侧更早出现低压。当中央油箱燃油量显示为 0 时,仍可能出现低压指示。低压灯闪烁可持续长达 5 分钟,然后 Fuel System Annunciator 指示灯与 MASTER CAUTION 才会亮起。以下为 AFM 摘录:当中央油箱燃油少于 5,000 lb(2,300 kg),且飞机已准备好开始滑行:中央油箱燃油泵必须置于 OFF。当中央油箱燃油量在爬升和巡航阶段接近约 1,000 lb(500 kg)时:两个中央油箱燃油泵开关必须置于 OFF。在下降与着陆阶段,当中央油箱燃油量接近约 3,000 lb(1,400 kg)时:两个中央油箱燃油泵开关必须置于 OFF。在首次出现燃油泵低压指示时:必须将燃油泵立即置于 OFF。如果在巡航阶段中央油箱燃油量大于 1,000 lb(500 kg),可再次将中央油箱燃油泵置于 ON。当中央油箱为空时:两个中央油箱燃油泵必须置于 OFF。设置中央油箱燃油泵为 OFF 的原因,是为了避免因飞机姿态变化而导致燃油泵入口失去燃油覆盖。This message is sent to the following:Shandong Airlines PRIORITY: RoutineACCOUNT: Shandong Airlines (SHG)DUE DATE: No Action RequiredFIELD BASE: BFSTNA-Jinan-ChinaPRODUCT TYPE: Flight OperationsPRODUCT LINE: 737PRODUCT: 16 - Flight Crew Procedures (QRH, FCOM Vol 1, FCTM, ECL)ATA: 0200 Operations - GeneralSERVICE CATEGORY: Operations & Customer Support SUBJECT: fuel pump REFERENCES:/A/ SHG-SHG-25-0862-01C DESCRIPTION:During the takeoff roll, if the center tank fuel quantity is below 453 kg (1000 lbs), is it possible for the respective fuel pump low pressure light to illuminate and subsequently trigger the master caution system signal? Furthermore, does the aircraft's takeoff configuration logic or a specific inhibit function suppress the master caution/warning associated with the center tank pump low pressure when the fuel quantity is below this threshold? RESPONSE:Yes, if the center tank fuel quantity is below 453 kg it is possible that the respective center tank pump low pressure light will illuminate during take-off roll due to fuel movement within the tank. However, illumination of the MASTER CAUTION and Fuel System Annunciator lights requires that the pump is producing continuous low pressure for 10 seconds or more. This requirement may or may not occur during takeoff. Therefore, triggering the MASTER CAUTION signal may or may not occur during takeoff. The aircraft’s takeoff configuration logic does not contain an inhibit function that suppresses the MASTER CAUTION associated with the center tank pump low pressure light when the fuel quantity is below this threshold. Also, there is no specific inhibit function designed to suppress the MASTER CAUTION associated with the center tank pump low pressure light when the fuel quantity is below this threshold. The logic for MASTER CAUTION due to center tank fuel pump low pressure is as follows: With both center tank pump switches ON and both pumps producing continuous low pressure, the steady illumination of both LOW PRESSURE lights for 10 seconds or more will illuminate the MASTER CAUTION and Fuel System Annunciator lights. With one center tank fuel pump switched OFF and the opposite pump producing continuous low pressure, the steady illumination of the opposite center tank fuel pump LOW PRESSURE light for 10 seconds or more will illuminate the MASTER CAUTION and Fuel System Annunciator lights. This 10-second time delay is necessary in order to guard against nuisance display of the MASTER CAUTION indication during operations with acceleration (such as takeoff) or deceleration with minimum fuel in the tank. When doing a recall of existing fault annunciations, the steady illumination of one LOW PRESSURE light will cause the Fuel System Annunciator light to illuminate upon recall.There must be a sustained low pressure condition in a center tank fuel pump (resulting in a steady illumination of a LOW PRESSURE light) for 10 seconds or more for the MASTER CAUTION and Fuel System Annunciator lights to illuminate. A momentary low pressure condition in a center tank pump (resulting in a flickering, unsteady illumination of the LOW PRESSURE light) will not trigger the Master Caution system signal. There is no definitive system logic that will inhibit the center tank low pressure indications during takeoff. The takeoff configuration logic will not inhibit the center tank low pressure indications during takeoff. Center fuel pump low pressure detection is based on the pump inlet not fully covered by fuel, leading to cavitation (air ingestion at the pump inlet), resulting in low center tank fuel pump pressure. There is no definitive fuel quantity in the center fuel tank that is related to when cavitation occurs. Uncovering the pump inlet may happen as a result of acceleration forces (such as during takeoff or during a sustained turn) or changes in airplane attitude (such as changes in pitch during a climb or descent, or airplane bank angle, or a nose-down attitude when on the ground). Uncovering the pump inlet may occur with varying quantities of fuel in the center tank. (Operators have observed fuel quantities as low as 0 kg and as high as 500 kg when the LOW PRESSURE light illuminates). MASTER CAUTION activation occurs when there is steady illumination of a LOW PRESSURE light for 10 seconds or more in any flight phase. This may occur during takeoff. There is no additional information provided by the QRH. Its purpose is to provide the flight crew with steps to correct the situation. The following is from the FCOM Fuel System description: Fuel PumpsEach fuel tank uses two AC powered fuel pumps which are cooled and lubricated by fuel passing through the pump. Center tank pumps produce higher pressure than main tank pumps. This ensures that center tank fuel is used before main tank fuel, even though all fuel pumps are operating. Individual pressure sensors monitor the output pressure of each pump. Each center tank pump will automatically shut off, after a short delay, when that pump’s sensor detects low output pressure. Note: Fuel pump LOW PRESSURE lights may flicker when tank quantity is low and the airplane is in a climb, descent, or on the ground with a nose-down attitude. Note: Center tank fuel pump LOW PRESSURE lights may flicker when tank quantity is low and the airplane is in cruise. One pump may indicate low pressure sooner than the other due to aircraft attitude and/or slight variation between pump inlet position. Low pressure indication may occur after center tank quantity reads zero. Low pressure light flickering can continue for as long as 5 minutes before the Fuel System Annunciator light and the Master Caution lights are illuminated for the associated center tank pump. Below is an extract quoted from the AFM: The center tank fuel pumps must be OFF for takeoff if center tank fuel is less than 5,000 pounds (2,300 kilograms) with the airplane readied for initial taxi. Both center tank fuel pump switches must be selected OFF when center tank fuel quantity reaches approximately 1,000 pounds (500 kilograms) during climb and cruise or 3,000 pounds (1,400 kilograms) during descent and landing. The fuel pumps must be positioned OFF at the first indication of fuel pump low pressure. The center tank pumps may be positioned ON again when established in cruise flight if the center tank contains more than 1,000 pounds (500 kilograms) of fuel. Both center tank pump switches must be positioned OFF if the center tank is empty. The reason for setting the center tank fuel pumps to OFF is to avoid the pump inlets losing fuel coverage due to aircraft movement. If attachments are referred to and are not present, please access them by logging into the Boeing Communication System on MyBoeingFleet or contact your Boeing Field Service Representative. Flight Operations Engineering (FLOE)Customer SupportThe Boeing CompanyBCA Operations Centers 24 Hour Contact Numbers787: +1 (206) 544-7787All Other Models: +1 (206) 544-7500
-
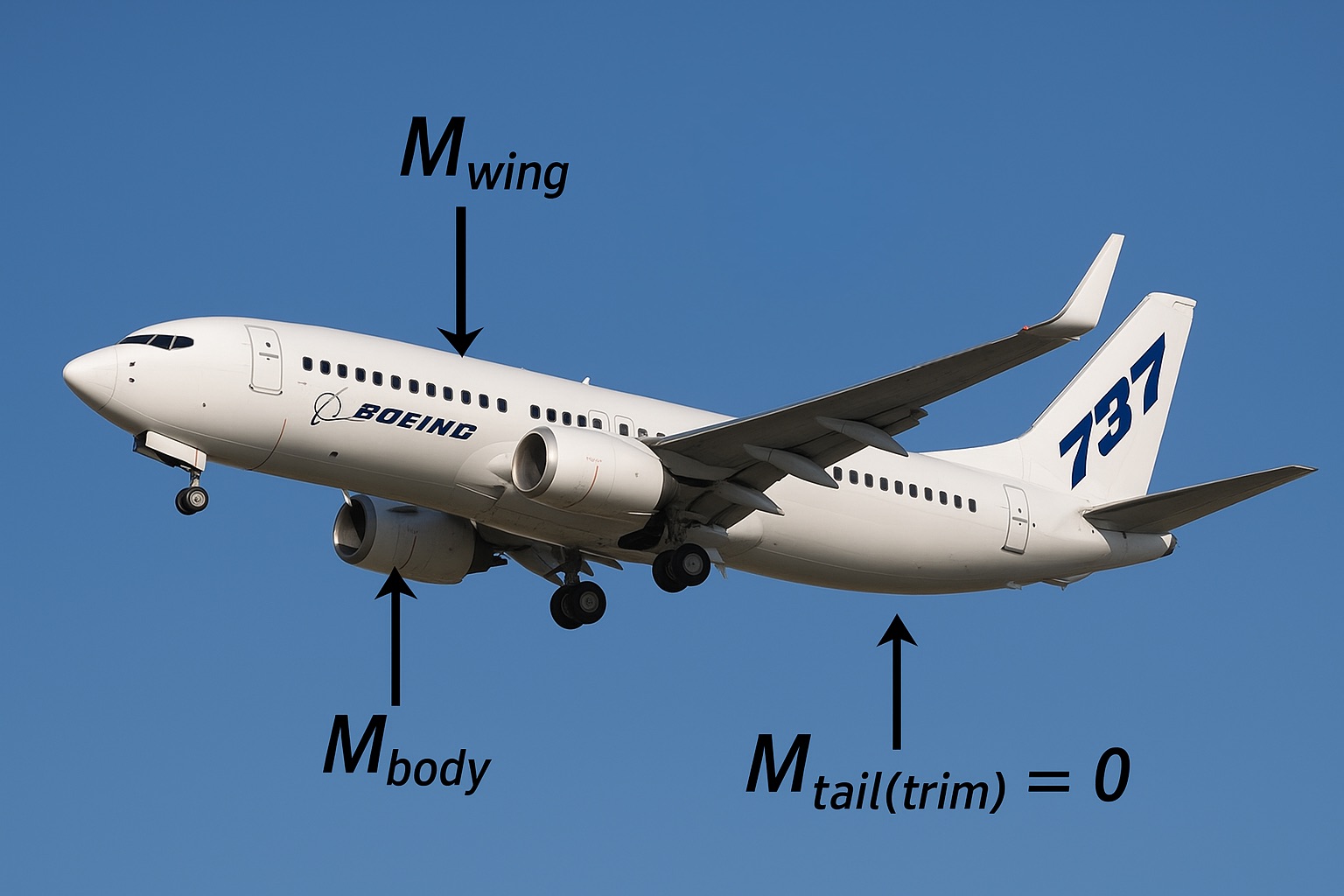
咨询波音有关进近阶段“in trim”的回复 RESPONSE:Boeing has reviewed your query and provides the following responses: Q1. By the FCTM, section “Flare and touchdown”: “ Begin with a stabilized approach on speed , in trim and on glide path.” What is the concept of being “in trim”. Would you please offer more details?问题一:根据《飞行机组训练手册》(FCTM)“拉平与接地”章节的要求:“稳定进近应以目标速度、配平良好且沿下滑道开始。”其中“配平良好”的概念具体指? A1. An airplane is “in trim” or “trimmed” when it is in a steady state and no pilot force is needed on the flight controls. When properly trimmed in pitch, the airplane airspeed is stable even if the Pilot Flying removes hands from the control yoke. If the PF pulls the control yoke, airspeed decreases. If the PF pushes, airspeed increases. When the PF’s push or pull input is released, the airplane returns to its trimmed pitch attitude and airspeed unless thrust has been changed. If the PF changes thrust but does not push or pull, the airplane will climb or descend to maintain the trimmed airspeed. The “in trim” state is an equilibrium unless it is disturbed by pilot input or thrust change. Proper pitch trim technique is essential for good airspeed control. 回复:当飞机处于稳定状态,飞行操纵不需要飞行员的力量时,飞机就处于“在配平状态”或“配平好状态”。当俯仰配平合适时,即使操纵飞机的飞行员将手从驾驶杆上拿开,飞机的空速也是稳定的。如果PF拉杆,则空速降低。如果PF推杆,则空速增加。当 PF松手不再推杆或拉杆,飞机回到配平的俯仰姿态和空速,除非推力已经改变。如果PF改变推力,但不推杆或拉杆,飞机将爬升或下降,以保持配平空速。“在配平状态”是一种平衡状态,除非受到飞行员输入或推力变化的干扰。适当的俯仰配平技巧对于良好的空速控制至关重要。 Q2. And from an aerodynamic standpoint, why does trimming in the flare increase hazards?问题二:从空气动力学的角度来看,为什么在拉平阶段进行配平会增加风险?A2. Trimming in the flare can change the elevator push-pull forces that the pilot feels while the trim is running. This can cause overcontrol of the elevator, resulting in unintended pitch up or pitch down as the airplane attempts to maintain a new trim speed. Thrust changes can make the situation worse. In all cases, a mis-trim increases the possibility that a balloon, a bounce, an adverse pitch attitude, and a rapid loss of airspeed can occur. A tail strike can result. 回复: 在拉平过程中配平会改变飞行员感受到的升降舵推拉杆力。这可能会导致升降舵控制过度,从而导致飞机在试图保持新的配平速度时出现意想不到的机头向上或向下。推力的变化会使情况变得更糟。在所有情况下,不当的配平都会增加弹跳、 不利的俯仰姿态和空速快速减小的可能性。这些可能导致擦机尾。 The airplane should be properly trimmed during approach. This will set a trim airspeed of VREF+5 (with wind additive if necessary). Proper trimming helps to establish the correct final approach speed and a stable approach. During a normal flare, the PF makes an appropriate and predictable pull input for a safe touchdown attitude. The predictable pull force for flare and touchdown promotes good control of touchdown airspeed and pitch attitude, and helps prevent tail strikes.在进近时应正确配平飞机。这将设置一个配平空速为 VREF+5(必要时加风增量)。正确配平有助于建立正确的五边进近速度和稳定的进近。在正常的拉平期间,PF为安全的接地姿态进行适当和可预测的拉杆。拉平和接地时可预测的拉杆力可以促进对接地空速和俯仰姿态的良好控制,并有助于防止擦机尾。 If in trim during approach but a go-around is needed, the airplane is already trimmed for VERF+5 (plus wind additive). This is a safe airspeed to initiate the go-around maneuver and it helps to prevent excessively high pitch attitude, which can cause a tail strike. It may be helpful to remember that trimming sets the airspeed that the airplane attempts to maintain. Increasing pitch trim during the flare to avoid manual inputs on the flight controls means that the airplane will try to maintain a speed below the approach target speed. This could have unexpected results if thrust is increased for any reason, such as a go-around or a bounce recovery.如果在进近过程中保持配平,但需要复飞,飞机已经为 VERF+5(加风增量)配平。 这是开始复飞机动的安全空速,它有助于防止过高的俯仰姿态,高俯仰姿态有可能导致擦机尾。关键是要记住,配平就是设定飞机想要保持的速度。在拉平期间增加俯仰配平以避免手动进行飞行操纵控制意味着飞机将试图保持低于进近目标速度的速度。如果出于任何原因(如复飞或弹跳改出)增加推力,这可能会产生意想不到的结果。If attachments are referred to and are not present, please access them by logging into the Boeing Communication System on MyBoeingFleet or contact your Boeing Field Service Representative. Sarah Parsley, Flight Operations SupportRyan Vas, ManagerCustomer SupportThe Boeing CompanyBCA Operations Centers 24 Hour Contact Numbers787: +1 (206) 544-7787All Other Models: +1 (206) 544-7500 在现代喷气式运输机的飞行运行中,波音飞行机组训练手册(FCTM)将“In Trim”(配平状态)列为稳定进近的三大基石之一。然而,在实际飞行训练,尤其是针对初级副驾驶(Cadet)的教学中,配平往往被简化为“减轻杆力”的手段,而忽略了其作为“飞行状态核心参照系”的深层气动意义。在飞行员的早期训练中,配平通常被描述为一种“舒适性工具”——用来消除驾驶盘上的持续压力。这种描述虽然直观,但却掩盖了配平在飞行力学中的核心地位。在波音737等由于发动机推力线与阻力线存在耦合的大型飞机上,配平状态直接决定了飞机的动态响应特性。FCTM 明确指出:“Begin with a stabilized approach on speed, in trim and on glide path.” 这句话不仅是操作规范,更是气动铁律。所谓的“In Trim”,并非指飞行员此刻“握紧、抓住了”飞机,而是指飞机在气动上达到了力矩平衡,即便没有飞行员的干预,飞机也会倾向于维持当前的能量状态。对于缺乏经验的副驾驶而言,理解“In Trim”是理解能量管理的第一步。未能建立正确的配平意识,是导致进近不稳定、拉平操作变形以及复飞姿态不可控的根源。飞机在纵向上的平衡取决于重力中心(CG)与气动中心(AC)之间的力矩关系。对于波音737这类传统布局飞机,水平安定面(Stabilizer)的主要作用是产生负升力(Downward Lift),以平衡机翼产生的低头力矩。当飞机处于“In Trim”状态时,满足以下力矩平衡条件:其中,关键变量在于由升降舵(Elevator)和水平安定面共同决定的尾部力矩 M_{tail}。波音737采用了全动水平安定面(Trimmable Horizontal Stabilizer),这意味着配平不仅仅是移动调整片(Tab),而是改变了整个尾翼的安装角。航空界有一句名言:“Trim for Airspeed”(为速度而配平)。这是“In Trim”概念的核心。从气动角度看,每一位置的配平设定,都对应一个特定的平衡迎角。在给定的飞机重量和构型下,根据升力公式:特定的迎角 alpha_{trim} 对应特定的升力系数 C_L,进而直接锁定了一个特定的平衡速度 V_{trim}。因此,“In Trim”的物理定义是:飞机的安定面位置使得当前速度下的气动力矩为零。如果实际速度 V < V_{trim}:由于动压不足,尾翼负升力减小,机头自然下沉,飞机寻求加速以恢复 V_{trim}。如果实际速度 V > V_{trim}:动压增加,尾翼负升力增大,机头自然上扬,飞机寻求减速以恢复 V_{trim}。这种自动回归设定速度的特性,即为速度稳定性(Speed Stability)。如果飞行员处于“缺少配平”状态(例如靠手臂力量拉杆维持 V_{ref}),实际上是强迫飞机飞在一个它气动上不平衡的速度。此时,飞机的自然趋势是低头加速,飞行员是在与飞机的自然稳定性“搏斗”。如果在进近中,飞行员一直维持着 10 磅的拉杆力(欠配平),那么当气流扰动或拉平操作需要额外的 2 磅力时,他很难感知到这微小的变化(2磅淹没在10磅的背景力中)。相反,如果飞机是完全配平的,任何微小的气流变化或姿态改变产生的力反馈都会被敏锐地捕捉到。结论显而易见: 配平越好,飞行员的手感越敏锐。未配平的飞机让飞行员的手臂变得“麻木”,丧失了通过杆力感知能量变化的能力。
-
B737轮胎类型分析及机组操纵要点简析 作者:培训部飞行培训中心 曹泽宇近日,B737-800 飞机执行济南-大连航班,起飞后机长反映离地时有异响,疑似轮胎异常,飞机各参数正常。济南机场场务发现跑道上有轮胎碎片,AOC 决策飞机备降青岛,安全着陆,机务检查发现左前轮轮胎脱层。依据《事件样例》六、(二)11“航空器轮胎爆破、脱层或扎破处遗留外来物”条款,构成机械原因不安全事件。飞机轮胎脱层图片经机务检查,该机左前轮胎面分层、脱落,胎面 360°均有脱落,脱落层厚度不一,大部分脱落位置露出白线,部分白线断裂,胎皮制造厂家为固特异,最近一次修理后,装机时长TSR:17FH/CSR:10FC。目前公司选装的轮胎类型分为两类:子午线轮胎(厂家:固特异Goodyear)、斜交线轮胎(厂家:普利司通Bridgestone)。737NG飞机前轮可安装子午线或斜交线轮胎,但不能两种混装,主轮仅可安装斜交线轮胎;737MAX飞机仅安装子午线轮胎。两种轮胎在外观上可通过观察轮胎侧壁生产厂家来进行区分,两者差异主要体现在胎皮内部结构的不同上。子午线轮胎,最外面一层织物称为割伤保护层(割伤保护层只有一层,不属于结构层)。下面的带束层和胎体帘线层都属于结构层。结构层损伤后可能会影响轮胎翻新。子午线轮胎第一层帘线属于割伤保护层,第二层帘线属于带束层内的帘线斜交线轮胎,胎面最外面两层帘线属于加强层(不属于结构层),下面的底胎面和胎体帘线层都属于轮胎的结构层。结构层损伤后可能会影响轮胎翻新。斜交线轮胎第一、二层帘线属于胎面加强层,第三层帘线属于胎体帘线层飞机轮胎在正常磨损情况下,整个胎面的磨损相对比较均匀,中央部位沟槽比肩部的磨耗多,中央部位的帘线层暴露可能比有些沟槽到达底部要早。正常磨损的轮胎若出现平斑磨损(非均匀异常磨损),如飞机防滞系统工作不正常导致的拖胎,此时轮胎可能会出现局部异常磨损,在绕机检查时需额外关注,并及时与机务人员沟通。发生拖胎后的轮胎在操纵前轮转弯时,应参考FCTM手册中相关内容,控制滑行速度,避免过度操纵前轮,导致前轮胎肩部位橡胶擦伤、脱落。这起B737-800前轮脱层事件是一起典型的机械原因不安全事件,事件提醒我们,飞行员在日常操作中应严格遵循FCTM手册规范,避免过度操纵前轮导致胎肩擦伤。同时,绕机检查时需重点关注轮胎磨损状态,特别是胎面均匀性和异常平斑磨损。了解子午线与斜交线轮胎的结构差异也有助于识别潜在风险。安全无小事,每一次的规范操作和细致检查都是飞行安全的重要保障。