搜索到
126
篇与
的结果
-
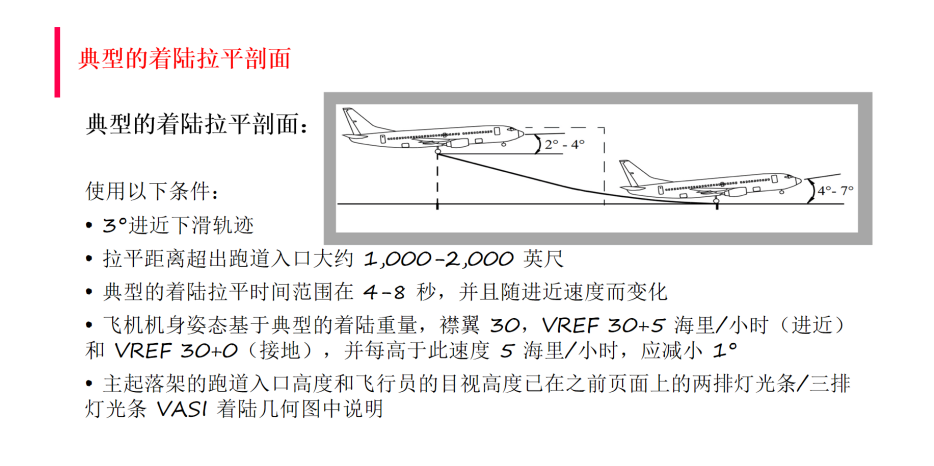
 关于训练中着陆技能的一点思考 作者:飞行部二大队耿跃一、关于训练的理解在飞行训练中,必须遵循教育和训练规律。飞行技术训练的教学有别于常规的知识教育,突出特点在于技能传授,训练的过程往往受训练时间有限,训练任务多面等限制,因此,作为飞行教员要同时处理训练的时效性和全面性,所以不但要懂教育学、心理学知识,还要熟练运用示范、提示和放手等特殊的教学方法。教员的基本能力还在于善于从蛛丝马迹中发现学员的飞行细节问题并分析原因,通过有效的教学手段纠正错误。对飞行教员来说,不但要训练飞行技术,还要重点培训其教学传授能力。抓教学,就是要抓教学方法研究与交流。既要重视技术成长,还要重视如何教、如何学的问题。不少飞行不安全事件是操纵者常规技术不熟练导致的。常规技术并不神秘,主要体现在基本驾驶操纵上。部分事件中,有的机组在转为人工操纵后,修正偏差的能力不强,往往控制不住飞机惯性,发生飞机偏出、冲出跑道甚至擦发动机、擦机尾等严重不安全事件。因此,公司为深刻吸取行业和公司严重不安全事件教训 ,系统防范核心风险 ,切实保障飞行安全,识别飞行岗位“技术五防”、“非技术五防”风险 ,坚持安全隐患“零容忍” ,坚持人为责任原因不安全事件“零容忍” ,构建飞行岗位核心胜任力“ 5 +5”风险管理体系。以下内容为个人的一点见解,从正常训练,标准操作,能量管理,气象条件等方面分析,如有不合理的地方请各位同事批评指正。二、关于着陆载荷大的分析,我们训练的导向。训练中想要解决问题,我们就先要找出问题,以下分析对于近两年着陆载荷大事件的统计分析,通过结果可以看到,大部分事件还是存在共性问题,主要有以下几个方面:1、飞机势能(垂直速度)对接地载荷的影响,垂直速度越大意味着高度减小的越快,表现为下降率大。飞机进跑道后在短时间内接地,接地时垂直速度(下降率)从较大值快速减小到 0,飞机受到地面的反作用力较大,垂直载荷会显著增大。2、飞机动能(水平速度)对接地载荷的影响,接地时油门未收光,飞机推力在垂直方向的分量会增大垂直载荷。3、机组抽杆对接地载荷的影响,机组短时间内带杆量输入较大,会造成飞机姿态的快速增大,升力作用在翼根部,导致垂直载荷增大;由于力矩的原因,在飞机接地过程中抽杆会加快主轮接地,相当于增大接地下降率,也会导致垂直载荷增大。4、入口条件的影响(1)入口状态存在偏差① 速度小或油门小,飞机动能不足,正常拉开始后飞机下沉偏快。② 速度大或油门大,收油门修正后带出姿态晚。③ 出姿态早,飞机不下沉,过早收光油门或稳杆修正。④ 姿态小,正常拉开始未能带出着陆姿态。(2)入口状态正常① 拉开始时机偏晚,接地前带杆量大。② 正常拉开始,带杆量不足。③ 拉开始后,有稳杆动作。④ 收油门时机晚或动作慢,飞机大速度接地。5、接地前/时抽杆、带油门接地导致飞机跳起,跳着陆处置不当:(1)跳起后松杆,二次接地时飞机姿态减小。(2)跳起后推拉杆,飞机姿态变化较大,二次接地时有抽杆动作。(3)飞机跳起后油门收到慢车,减速板伸出,导致二次接地重。6、外界气象条件的影响,大风乱流,低能见等天气。三、训练中的基本理念结合以上的事件分析可以看到,要保证训练质量,我们需要明确以下几个理念:1、飞机的能量的理解,飞机能量是速度,姿态,油门的匹配,单一数据不能体现,仅盯速度不看姿态,会导致俯仰的变化,甚至会制造新的偏差。(1)允许速度在合理范围内变化——稳定气流条件下,以 5KTS 左右的变化量设定范围。只要速度没超过此范围,不用动油门或微调油门,以保持状态稳定。飞机必须以进近速度飞行,如果空速接近进近速度,则可接受+10 节至-5 节偏差,特别注意训练手册强调的是接近进近速度时,即趋向正常速度。(2)加油门果断,收油门谨慎。参考自动油门的设计,在空速下降到指令速度以下时会快速调整推力,超过指令速度时,会缓慢减小推力。当速度低到安全范围底线甚至超出时,为了制止速度的下跌以及增速到安全范围以内,就需要大的油门变化量。除非你及时发现并判断出减速苗头,增加油门就可柔和一些,俗称“补油门”。当速度过大时,由于推力产生的变化相较于油门杆移动是有滞后的,所以应试探着柔和多次少量地减小油门,有乱流时,风的变化也是快速且无序的,防止气流突然改变导致速度减少过快而来不及补上足够的油门(3)加强杆与油门的配合,补油门同时要有意识向前适当增加稳杆量;收油门同时要有意识向后适当增加带杆量;杆量以保持所选下降率 为准。有时由于油门变化量小,升降率的变化不会很明显地立即显现。2、拉平过程是良好入口条件的延续,也是入口条件轻微偏差的修正和调整。拉平过程是在油门杆和驾驶杆配合下,飞机状态按照预定的轨迹完成着陆的一个过程,一个良好的着陆过程飞机始终维持一个动态平衡,在油门杆与驾驶杆的“柔和一致”中接地。(1)拉平过程中油门的使用①在同样状态下,入口速度大,代表此时飞机气动性能偏强,容易造成接地速度大导致接地姿态小,也容易造成拉高拉飘等状况。为了避免气动性能强的影响应该早点收油门或收油门时机不变,但速率比正常快一点,或根据实际情况两者相结合,从而消除入口速度大对着陆造成的影响。②那入口条件在正常,但是入口油门小(有明显的减速趋势),如果还以正常的时机和速率收油门就会造成飞机下沉快。则需要比正常的时机晚收一点或速率慢一些,或两者相结合。如果小的过多可能还要补一些油门。从这两个例子可以看出我们要做的就是“让多的少,让大的小,让不足的足,让不够的够”,最终达到平衡的目的,这些都可以通过公司常说的“四控制、一使用、一分配”实现。(2)拉平过程中驾驶杆的使用①飞机的飞行是靠在一定速度下,利用气动性能,使用各个舵面来控制飞机轨迹。在入口以后到接地前,杆是控制下沉最直接,最有效的方法。还要理解杆的延时性。根据升力公式,可以影响升力的是速度和升力系数,升力系数跟仰角有关。杆是通过作动升降舵实现升力的改变。初期带杆升降舵角度改变,在机位处形成向下的压力,压低机尾,根据杠杆原理,抬升了机头,增大仰角,在这个过程中初期飞机的下降率是瞬间增大的,直到增大的仰角带来了升力的变化飞机才会感受到整体升力,减小飞机的下沉。所以,拉开始过晚,带杆还没有改善升力时飞机接地了,不仅会造成接地载荷大,还会造成接地后仰角持续增大或飞机跳起。②理解飞机的低头力矩,737飞机是下单翼飞机,油门的增减会带来抬头和低头力矩,在着陆拉平过程中应该是根据飞机状态持续收油门的过程,这样通过杆量控制可以增加容错率。如果保持油门直到10英尺将油门一把收光,这个过程会形成低头力矩,所以此时带杆不仅需要改善升力还需要抵消形成的低头力矩,相当于同时处理两个问题,否则就会掉机头,这也是很多时候感觉自己带杆了但没能有效制止下沉的原因。四、基于手册的标准手法熟练掌握基于手册的落地手法是提升技能最根本的依靠“当跑道头从机头下越过并消失后,将视线转移到跑道的远端。转移视线有助于在拉平时控制俯仰姿态。保持恒定的空速和下降率有助于确定拉平点。当主轮在跑道上方大约20 英尺时,增加大约2-3° 的俯仰姿态开始拉平。这可以减小下降率。拉平开始后,柔和地把油门收到慢车,略微调整俯仰姿态以保持所需的下降率直到接地。理想的情况是油门杆收到慢车的同时主轮接地。柔和地把油门收到慢车也有助于控制因收油门而产生的机头自然下俯。保持足够的带杆力以保持俯仰姿态不变。接地姿态根据Vref不同而有所变化。理想情况下,油门杆收到慢车位的同时主轮接地。”在基于手册的落地方法中,把大家关心的问题也进行了总结:(1)视线转移的方法﹡转移视线的时机:当跑道入口从机头下方越过并消失时。﹡转移视线至何处:跑道尽头。﹡转移视线的目的:有助于在拉平时控制俯仰姿态。﹡保持恒定的空速和下降率:有助于确定拉平点。(2)油门的控制方法﹡收油门的时机: 在主起落架距跑道大约20英尺时,增加俯仰姿态2°-3°后,开始柔和收油门杆到慢车。﹡收油门至慢车的同时:小量修正俯仰姿态,以保持所需的下降率直到接地。保持足够的带杆力以保证俯仰姿态稳定。﹡拉开始和收油门的先后顺序:先拉开始,后收油门。﹡收油门的速率和量:柔和收油门杆到慢车,最好在主起落架接地的同时将油门杆收到慢车。(3)拉平的操作方法﹡拉平的时机:当主起落架距跑道大约20英尺时。﹡拉平的姿态变化:增加俯仰姿态约 2°-3°。(4)驾驶杆的使用方法﹡驾驶杆的改变量:拉平时避免过快的移动、避免拉平时使用配平、避免平飘;着陆后避免增加俯仰姿态,配平,或使前轮离开跑道,这可能会导致擦机尾。﹡拉平的结果:以所需的空速,保持所需的下降率在准确的接地点将飞机“飞”到跑道上。﹡着陆后不要增加俯仰姿态,配平,或使前轮离开跑道。这可能会导致擦机尾。五、典型案例分析本次案例是一起前置超限事件,但是可以从中看到部分地方与标准操手册不符的地方。50尺到15尺平飘距离略低于机队,可以看到10英尺时有一个明显的下降率变化,随后高于剖面。20英尺前下沉基本正常,20-10英尺下降率减小较快,10英尺以后下降率有增加。在应该拉开始的阶段,下降率反而增加了,直到最后5英尺,控制住下沉。空速一直低于机队平均值,而俯仰配平小于机队平均值。速度小,入口条件创造不好,后续修正也不及时。仰角在35-10英尺后快速增加,10英尺之后略有减小;驾驶杆使用在30英尺前偏大,之后偏小。结合驾驶杆的使用和仰角变化来看,机组修正乱流,影响后续拉平动作N1值整体高于机队平均值;油门杆使用也高于机队平均值,10英尺后油门处于慢车位置。油们位置处于偏大状态,但是速度偏小。天气信息:METAR ZGSZ 071500Z 12005MPS 9999 SCT026 26/23 Q1009 NOSIG=TAF ZGSZ 071508Z 0718/0824 12004MPS 8000 BKN030 TX30/0806Z TN24/0722Z TN25/0822Z BECMG 0803/0804 18004MPS=METAR ZGSZ 071530Z 12006MPS 9999 SCT026 26/23 Q1009 NOSIG=METAR ZGSZ 071600Z 12005MPS 9999 SCT033 26/23 Q1008 NOSIG=METAR ZGSZ 071630Z 12006MPS 9999 SCT033 26/23 Q1008 NOSIG=译码分析:飞机着陆重量65.1吨(143520磅),使用16号跑道落地,五边风向在126°到90°变化,风速从12节到7节之间变化,Vref30=148kt,选择空速153节,风增量+5。决断高到50英尺:下降率基本处于-704ft/min到-816ft/min之间,空速处于153节到158节之间,仰角处于1.406°-2.988°之间,状态较为稳定。飞机入口:下降率-768ft/min。入口仰角2.109度。入口空速153节,入口N1值61。入口条件正常。50英尺到11英尺:仰角由2.109°逐渐增加到4.043°,下降率由-768ft/min逐渐减小到-208ft/min,40-30英尺出姿态,机组在21英尺开始收油门,最大俯仰4.403°出现在21-11英尺高度。11英尺到接地:8英尺油门杆收至慢车,仰角由4.043°减小到2.109°,下降率由-208ft/min增加到-272ft/min,机组带杆量由2.77增加至5.05。空速由152.75节减小到145节。接地载荷1.389,此时减速板升起,有载荷叠加,最终产生载荷1.631G。原因分析:环境因素:五边基本处于侧顶风,风速逐渐减小,飞机能量趋势是一个减弱的过程,并且一直持续到接地,由12节减小到7节,空速基本维持在目标空速到目标空速+5节左右,状态保持较好.机组操纵:机组整体的短五边状态保持和拉开始时机都很正常,但是由于增加仰角过多,导致飞机在11英尺达到-208FT/MIN,于是机组将油门收至慢车。机组没能保持足够的带杆量,没有维持足够的接地仰角,飞机重量65.1吨,比较重,油门收光之后低头力矩的影响叠加顶风减小导致下沉在接地的同时增加,虽然机组持续带杆,但控制下沉效果不足,所有减速板伸出下压瞬时叠加下降率导致接地载荷大。六、训练和教学方法1、训练应该是循序渐进的过程在训练中,教员应该根据学员所处阶段不同,教员可以将训练教学分为三个阶段。认知阶段主要是从看别人做到想动手,再到跟着做,教员需要进行演示、讲解、指导。练习阶段是从跟着做到按部就班地做,再到轻松、灵活地做。教员需要在模拟机训练场景中不断强化学员的练习、试错,并接受学员犯错,给予学员更多练习的机会。自动化反应阶段是从轻松灵活地做到变通地做,再到创造性地做。教员可通过变换条件,增加操纵的复杂度和挑战性。2、如何让做到提高训练质量(1)教学和讲评过程中一定要以基于手册的落地手法作为指导依据,不能掺杂个人习惯,树立标准操作意识。(2)教学要讲究因人而异。成长是循序渐进的过程,不能拔苗助长,训练中应该利用公司现有的数据平台的统计和分析,比如:Froms平台,充分把这个平台的分析结果结合训练中,哪里有问题,就针对性的练,个性化定制,才能补足短板。(3)正确的点线面印象,五边的不外乎这几个方面,训练中,教员做好标准示范,并且纠正学员的错误印象,让学员形成一种不在标准的轨迹就别扭的反应,这是一个时间积累的过程。(4)稳定进近意识。创造良好的入口条件,注意飞机能量的控制,做到油门,姿态,速度的匹配,除此之外还要做好有轻微偏差时的修正能力,气象条件的变化必然导致飞机状态的变化,所以学员应该具备一定的偏差修正能力,但是也不能盲目盲干。落地后及时复盘,冰冻三尺非一日之寒,复盘总结才是进步的重要方法,线自己分析,在教员讲评,从发现问题,描述问题,分析问题,消除问题。这样每天前进一小步,日积月累,才会实现质的提高。
关于训练中着陆技能的一点思考 作者:飞行部二大队耿跃一、关于训练的理解在飞行训练中,必须遵循教育和训练规律。飞行技术训练的教学有别于常规的知识教育,突出特点在于技能传授,训练的过程往往受训练时间有限,训练任务多面等限制,因此,作为飞行教员要同时处理训练的时效性和全面性,所以不但要懂教育学、心理学知识,还要熟练运用示范、提示和放手等特殊的教学方法。教员的基本能力还在于善于从蛛丝马迹中发现学员的飞行细节问题并分析原因,通过有效的教学手段纠正错误。对飞行教员来说,不但要训练飞行技术,还要重点培训其教学传授能力。抓教学,就是要抓教学方法研究与交流。既要重视技术成长,还要重视如何教、如何学的问题。不少飞行不安全事件是操纵者常规技术不熟练导致的。常规技术并不神秘,主要体现在基本驾驶操纵上。部分事件中,有的机组在转为人工操纵后,修正偏差的能力不强,往往控制不住飞机惯性,发生飞机偏出、冲出跑道甚至擦发动机、擦机尾等严重不安全事件。因此,公司为深刻吸取行业和公司严重不安全事件教训 ,系统防范核心风险 ,切实保障飞行安全,识别飞行岗位“技术五防”、“非技术五防”风险 ,坚持安全隐患“零容忍” ,坚持人为责任原因不安全事件“零容忍” ,构建飞行岗位核心胜任力“ 5 +5”风险管理体系。以下内容为个人的一点见解,从正常训练,标准操作,能量管理,气象条件等方面分析,如有不合理的地方请各位同事批评指正。二、关于着陆载荷大的分析,我们训练的导向。训练中想要解决问题,我们就先要找出问题,以下分析对于近两年着陆载荷大事件的统计分析,通过结果可以看到,大部分事件还是存在共性问题,主要有以下几个方面:1、飞机势能(垂直速度)对接地载荷的影响,垂直速度越大意味着高度减小的越快,表现为下降率大。飞机进跑道后在短时间内接地,接地时垂直速度(下降率)从较大值快速减小到 0,飞机受到地面的反作用力较大,垂直载荷会显著增大。2、飞机动能(水平速度)对接地载荷的影响,接地时油门未收光,飞机推力在垂直方向的分量会增大垂直载荷。3、机组抽杆对接地载荷的影响,机组短时间内带杆量输入较大,会造成飞机姿态的快速增大,升力作用在翼根部,导致垂直载荷增大;由于力矩的原因,在飞机接地过程中抽杆会加快主轮接地,相当于增大接地下降率,也会导致垂直载荷增大。4、入口条件的影响(1)入口状态存在偏差① 速度小或油门小,飞机动能不足,正常拉开始后飞机下沉偏快。② 速度大或油门大,收油门修正后带出姿态晚。③ 出姿态早,飞机不下沉,过早收光油门或稳杆修正。④ 姿态小,正常拉开始未能带出着陆姿态。(2)入口状态正常① 拉开始时机偏晚,接地前带杆量大。② 正常拉开始,带杆量不足。③ 拉开始后,有稳杆动作。④ 收油门时机晚或动作慢,飞机大速度接地。5、接地前/时抽杆、带油门接地导致飞机跳起,跳着陆处置不当:(1)跳起后松杆,二次接地时飞机姿态减小。(2)跳起后推拉杆,飞机姿态变化较大,二次接地时有抽杆动作。(3)飞机跳起后油门收到慢车,减速板伸出,导致二次接地重。6、外界气象条件的影响,大风乱流,低能见等天气。三、训练中的基本理念结合以上的事件分析可以看到,要保证训练质量,我们需要明确以下几个理念:1、飞机的能量的理解,飞机能量是速度,姿态,油门的匹配,单一数据不能体现,仅盯速度不看姿态,会导致俯仰的变化,甚至会制造新的偏差。(1)允许速度在合理范围内变化——稳定气流条件下,以 5KTS 左右的变化量设定范围。只要速度没超过此范围,不用动油门或微调油门,以保持状态稳定。飞机必须以进近速度飞行,如果空速接近进近速度,则可接受+10 节至-5 节偏差,特别注意训练手册强调的是接近进近速度时,即趋向正常速度。(2)加油门果断,收油门谨慎。参考自动油门的设计,在空速下降到指令速度以下时会快速调整推力,超过指令速度时,会缓慢减小推力。当速度低到安全范围底线甚至超出时,为了制止速度的下跌以及增速到安全范围以内,就需要大的油门变化量。除非你及时发现并判断出减速苗头,增加油门就可柔和一些,俗称“补油门”。当速度过大时,由于推力产生的变化相较于油门杆移动是有滞后的,所以应试探着柔和多次少量地减小油门,有乱流时,风的变化也是快速且无序的,防止气流突然改变导致速度减少过快而来不及补上足够的油门(3)加强杆与油门的配合,补油门同时要有意识向前适当增加稳杆量;收油门同时要有意识向后适当增加带杆量;杆量以保持所选下降率 为准。有时由于油门变化量小,升降率的变化不会很明显地立即显现。2、拉平过程是良好入口条件的延续,也是入口条件轻微偏差的修正和调整。拉平过程是在油门杆和驾驶杆配合下,飞机状态按照预定的轨迹完成着陆的一个过程,一个良好的着陆过程飞机始终维持一个动态平衡,在油门杆与驾驶杆的“柔和一致”中接地。(1)拉平过程中油门的使用①在同样状态下,入口速度大,代表此时飞机气动性能偏强,容易造成接地速度大导致接地姿态小,也容易造成拉高拉飘等状况。为了避免气动性能强的影响应该早点收油门或收油门时机不变,但速率比正常快一点,或根据实际情况两者相结合,从而消除入口速度大对着陆造成的影响。②那入口条件在正常,但是入口油门小(有明显的减速趋势),如果还以正常的时机和速率收油门就会造成飞机下沉快。则需要比正常的时机晚收一点或速率慢一些,或两者相结合。如果小的过多可能还要补一些油门。从这两个例子可以看出我们要做的就是“让多的少,让大的小,让不足的足,让不够的够”,最终达到平衡的目的,这些都可以通过公司常说的“四控制、一使用、一分配”实现。(2)拉平过程中驾驶杆的使用①飞机的飞行是靠在一定速度下,利用气动性能,使用各个舵面来控制飞机轨迹。在入口以后到接地前,杆是控制下沉最直接,最有效的方法。还要理解杆的延时性。根据升力公式,可以影响升力的是速度和升力系数,升力系数跟仰角有关。杆是通过作动升降舵实现升力的改变。初期带杆升降舵角度改变,在机位处形成向下的压力,压低机尾,根据杠杆原理,抬升了机头,增大仰角,在这个过程中初期飞机的下降率是瞬间增大的,直到增大的仰角带来了升力的变化飞机才会感受到整体升力,减小飞机的下沉。所以,拉开始过晚,带杆还没有改善升力时飞机接地了,不仅会造成接地载荷大,还会造成接地后仰角持续增大或飞机跳起。②理解飞机的低头力矩,737飞机是下单翼飞机,油门的增减会带来抬头和低头力矩,在着陆拉平过程中应该是根据飞机状态持续收油门的过程,这样通过杆量控制可以增加容错率。如果保持油门直到10英尺将油门一把收光,这个过程会形成低头力矩,所以此时带杆不仅需要改善升力还需要抵消形成的低头力矩,相当于同时处理两个问题,否则就会掉机头,这也是很多时候感觉自己带杆了但没能有效制止下沉的原因。四、基于手册的标准手法熟练掌握基于手册的落地手法是提升技能最根本的依靠“当跑道头从机头下越过并消失后,将视线转移到跑道的远端。转移视线有助于在拉平时控制俯仰姿态。保持恒定的空速和下降率有助于确定拉平点。当主轮在跑道上方大约20 英尺时,增加大约2-3° 的俯仰姿态开始拉平。这可以减小下降率。拉平开始后,柔和地把油门收到慢车,略微调整俯仰姿态以保持所需的下降率直到接地。理想的情况是油门杆收到慢车的同时主轮接地。柔和地把油门收到慢车也有助于控制因收油门而产生的机头自然下俯。保持足够的带杆力以保持俯仰姿态不变。接地姿态根据Vref不同而有所变化。理想情况下,油门杆收到慢车位的同时主轮接地。”在基于手册的落地方法中,把大家关心的问题也进行了总结:(1)视线转移的方法﹡转移视线的时机:当跑道入口从机头下方越过并消失时。﹡转移视线至何处:跑道尽头。﹡转移视线的目的:有助于在拉平时控制俯仰姿态。﹡保持恒定的空速和下降率:有助于确定拉平点。(2)油门的控制方法﹡收油门的时机: 在主起落架距跑道大约20英尺时,增加俯仰姿态2°-3°后,开始柔和收油门杆到慢车。﹡收油门至慢车的同时:小量修正俯仰姿态,以保持所需的下降率直到接地。保持足够的带杆力以保证俯仰姿态稳定。﹡拉开始和收油门的先后顺序:先拉开始,后收油门。﹡收油门的速率和量:柔和收油门杆到慢车,最好在主起落架接地的同时将油门杆收到慢车。(3)拉平的操作方法﹡拉平的时机:当主起落架距跑道大约20英尺时。﹡拉平的姿态变化:增加俯仰姿态约 2°-3°。(4)驾驶杆的使用方法﹡驾驶杆的改变量:拉平时避免过快的移动、避免拉平时使用配平、避免平飘;着陆后避免增加俯仰姿态,配平,或使前轮离开跑道,这可能会导致擦机尾。﹡拉平的结果:以所需的空速,保持所需的下降率在准确的接地点将飞机“飞”到跑道上。﹡着陆后不要增加俯仰姿态,配平,或使前轮离开跑道。这可能会导致擦机尾。五、典型案例分析本次案例是一起前置超限事件,但是可以从中看到部分地方与标准操手册不符的地方。50尺到15尺平飘距离略低于机队,可以看到10英尺时有一个明显的下降率变化,随后高于剖面。20英尺前下沉基本正常,20-10英尺下降率减小较快,10英尺以后下降率有增加。在应该拉开始的阶段,下降率反而增加了,直到最后5英尺,控制住下沉。空速一直低于机队平均值,而俯仰配平小于机队平均值。速度小,入口条件创造不好,后续修正也不及时。仰角在35-10英尺后快速增加,10英尺之后略有减小;驾驶杆使用在30英尺前偏大,之后偏小。结合驾驶杆的使用和仰角变化来看,机组修正乱流,影响后续拉平动作N1值整体高于机队平均值;油门杆使用也高于机队平均值,10英尺后油门处于慢车位置。油们位置处于偏大状态,但是速度偏小。天气信息:METAR ZGSZ 071500Z 12005MPS 9999 SCT026 26/23 Q1009 NOSIG=TAF ZGSZ 071508Z 0718/0824 12004MPS 8000 BKN030 TX30/0806Z TN24/0722Z TN25/0822Z BECMG 0803/0804 18004MPS=METAR ZGSZ 071530Z 12006MPS 9999 SCT026 26/23 Q1009 NOSIG=METAR ZGSZ 071600Z 12005MPS 9999 SCT033 26/23 Q1008 NOSIG=METAR ZGSZ 071630Z 12006MPS 9999 SCT033 26/23 Q1008 NOSIG=译码分析:飞机着陆重量65.1吨(143520磅),使用16号跑道落地,五边风向在126°到90°变化,风速从12节到7节之间变化,Vref30=148kt,选择空速153节,风增量+5。决断高到50英尺:下降率基本处于-704ft/min到-816ft/min之间,空速处于153节到158节之间,仰角处于1.406°-2.988°之间,状态较为稳定。飞机入口:下降率-768ft/min。入口仰角2.109度。入口空速153节,入口N1值61。入口条件正常。50英尺到11英尺:仰角由2.109°逐渐增加到4.043°,下降率由-768ft/min逐渐减小到-208ft/min,40-30英尺出姿态,机组在21英尺开始收油门,最大俯仰4.403°出现在21-11英尺高度。11英尺到接地:8英尺油门杆收至慢车,仰角由4.043°减小到2.109°,下降率由-208ft/min增加到-272ft/min,机组带杆量由2.77增加至5.05。空速由152.75节减小到145节。接地载荷1.389,此时减速板升起,有载荷叠加,最终产生载荷1.631G。原因分析:环境因素:五边基本处于侧顶风,风速逐渐减小,飞机能量趋势是一个减弱的过程,并且一直持续到接地,由12节减小到7节,空速基本维持在目标空速到目标空速+5节左右,状态保持较好.机组操纵:机组整体的短五边状态保持和拉开始时机都很正常,但是由于增加仰角过多,导致飞机在11英尺达到-208FT/MIN,于是机组将油门收至慢车。机组没能保持足够的带杆量,没有维持足够的接地仰角,飞机重量65.1吨,比较重,油门收光之后低头力矩的影响叠加顶风减小导致下沉在接地的同时增加,虽然机组持续带杆,但控制下沉效果不足,所有减速板伸出下压瞬时叠加下降率导致接地载荷大。六、训练和教学方法1、训练应该是循序渐进的过程在训练中,教员应该根据学员所处阶段不同,教员可以将训练教学分为三个阶段。认知阶段主要是从看别人做到想动手,再到跟着做,教员需要进行演示、讲解、指导。练习阶段是从跟着做到按部就班地做,再到轻松、灵活地做。教员需要在模拟机训练场景中不断强化学员的练习、试错,并接受学员犯错,给予学员更多练习的机会。自动化反应阶段是从轻松灵活地做到变通地做,再到创造性地做。教员可通过变换条件,增加操纵的复杂度和挑战性。2、如何让做到提高训练质量(1)教学和讲评过程中一定要以基于手册的落地手法作为指导依据,不能掺杂个人习惯,树立标准操作意识。(2)教学要讲究因人而异。成长是循序渐进的过程,不能拔苗助长,训练中应该利用公司现有的数据平台的统计和分析,比如:Froms平台,充分把这个平台的分析结果结合训练中,哪里有问题,就针对性的练,个性化定制,才能补足短板。(3)正确的点线面印象,五边的不外乎这几个方面,训练中,教员做好标准示范,并且纠正学员的错误印象,让学员形成一种不在标准的轨迹就别扭的反应,这是一个时间积累的过程。(4)稳定进近意识。创造良好的入口条件,注意飞机能量的控制,做到油门,姿态,速度的匹配,除此之外还要做好有轻微偏差时的修正能力,气象条件的变化必然导致飞机状态的变化,所以学员应该具备一定的偏差修正能力,但是也不能盲目盲干。落地后及时复盘,冰冻三尺非一日之寒,复盘总结才是进步的重要方法,线自己分析,在教员讲评,从发现问题,描述问题,分析问题,消除问题。这样每天前进一小步,日积月累,才会实现质的提高。 -
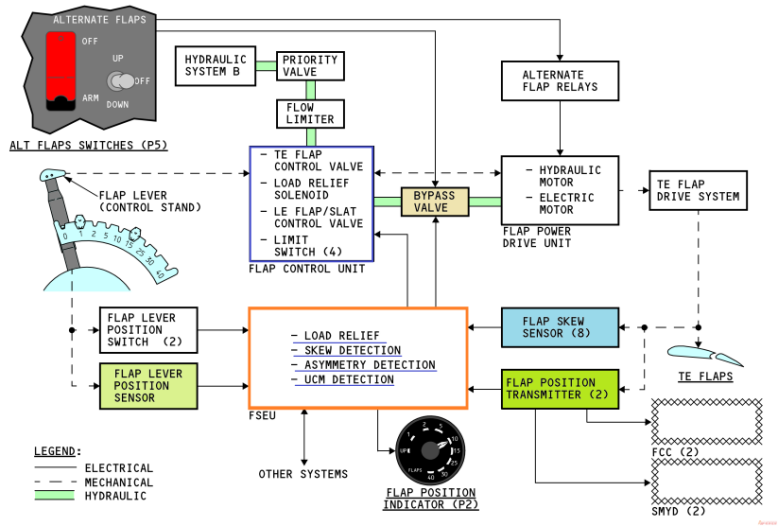
后缘襟翼故障浅析 作者:飞行部一大队刘崇伟作为飞机上至关重要的组件之一,襟翼在飞行过程中发挥着极其关键的作用。在驾驶舱内,正常操纵后缘襟翼的设备主要包括襟翼操纵手柄及襟翼指位器,襟翼的收放看似简单,但其背后却有众多的“安全守护者”在默默守护,一旦襟翼系统出现任何问题,这些“守护者”便会立即行动,为飞行安全保驾护航。首先,让我们共同回顾后缘襟翼的整体运行情况:在正常操纵襟翼期间,后缘襟翼由液压操作,在备用操纵期间,后缘襟翼由电动马达操纵;襟翼卸载功能是指在空速超过襟翼标牌速度后自动收回后缘襟翼,以防止后缘襟翼结构损伤和机翼结构损伤。在后缘襟翼收放过程中,一旦传感器探测到襟翼未达到指令位置,则可能出现:后缘襟翼不一致或者后缘襟翼不对称或后缘襟翼偏斜等情况。(下图为后缘襟翼系统图)正常襟翼操纵时:后缘襟翼利用液压系统B的压力来移动后缘襟翼,机组通过襟翼手柄位置输入指令,B液压系统的压力经过优先活门和流量限制器到达襟翼控制组件,优先活门保证B系统液压动力优先供给前缘装置,而不是后缘襟翼,流量限制器限制后缘襟翼的移动速度。在正常操纵期间,后缘襟翼完全放下或完全收回约需38秒。备用操作襟翼时:在备用操纵期间,使用备用襟翼电门操纵后缘襟翼,备用操纵用电动力代替液压动力。当将备用襟翼预位电门搬到预位位置时:后缘襟翼旁通活门移到旁通位置。备用液压泵起动备用襟翼控制电门通电只有将预位电门处于预位位置时,备用襟翼控制电门才能使用。当将控制电门扳到并保持在放下位置时,后缘襟翼和前缘装置打开,为停止打开后缘襟翼,将控制电门扳到关闭位。在备用操纵期间,后缘襟翼可打开到40单位位置,出于复飞收襟翼考虑QRH要求备用放襟翼到15,在备用操纵期间,后缘襟翼放出至襟翼15大约需要2分钟,完全放下或收回大约需要2分钟39秒。后缘襟翼系统的相关故障:1、后缘襟翼不对称:FSEU使用左右襟翼位置传感器的数据进行对比,当左右襟翼位置传感器解析角度差值大于9度时,FSEU发出指令给旁通活门以停止后缘襟翼液压操作,同时还向驾驶舱襟翼位置指示器发送信号使指针偏转约9度。如图:2、后缘襟翼倾斜:FSEU使用倾斜传感器和襟翼位置传感器的数据进行对比来探测、后缘襟翼倾斜状态,当倾斜传感器之间的解析角度达到设定值时,FSEU发出指令给旁通活门使后缘襟翼停止液压操作。在发生倾斜状态下,FSEU还与襟翼位置传感器的角度进行比较来确定倾斜发生在收上或放出期间的那侧襟翼,并将信号发送到位置指示器某一指针,使左右指针偏转约15度。如图:3、后缘襟翼非指令性移动:FSEU使用倾斜传感器以及襟翼位置传感器的数据进行对比来探测后缘襟翼非指令移动状态,无襟翼手柄或襟翼卸载指令存在但后缘襟翼出现以下情况,视为探测到非指令性移动:从指令位置移出;达到指令位置后继续移动,或向与指令相反的方向移动。后缘襟翼故障处置原则:涉及到后缘襟翼的非正常检查单有“后缘襟翼不对称”、“后缘襟翼不一致”、“无后缘襟翼着陆”和“所有襟翼收上着陆”,在襟翼系统出现故障时,机组应首先判断当前状态为“后缘襟翼不对称”还是“后缘襟翼不一致”,其次执行相关检查单并依据检查单指引,确认后缘襟翼当前放出的位置前缘装置状态,选择“无后缘襟翼着陆”或“所有襟翼收上着陆”检查单。近年来,机队后缘襟翼故障的发生频率有所上升,建议机组在执行航班任务时,特别是在进近着陆阶段,应密切监控襟翼的运行状态,并严格落实标准喊话程序,以便襟翼出现异常情况时,机组可以迅速识别相关故障,并第一时间采取措施。对于襟翼5及以上时的襟翼故障,建议机组申请等待,并按照既定程序进行处理;在五边进近建立着陆构型时,由于起落架的放下,飞机的越障能力可能会受到限制,机组需综合考量飞机性能与地形因素,决定是否收起或保持起落架。若襟翼处于15或以上位置,且起落架收起时,油门杆超过中立位置可能会触发形态警告喇叭,这将对机组处理紧急情况产生不利影响。
-
航图中RDH与TCH的区别?TDZ、TDZE的概念,以及进近图上机场标高、入口标高的概念,以及HUD AIII进近所调跑道标高应该是哪个? 作者:飞行部七大队 李新奇一、航图中RDH与TCH的区别RDH(Reference Datum Height,参考基准点高)和TCH(Threshold Crossing Height,穿越跑道入口高)是航图中与进近程序相关的两个关键参数,均用于描述飞机在跑道入口处的高度,但其定义、测量方式及应用场景存在显著差异:1.定义与计算方式 RDH是通过实际校飞测量得出的值,利用飞机实际飞行轨迹的线性回归模拟(BFSL,最佳拟合直线)确定,更贴近真实飞行情况。RDH主要用于ILS(仪表着陆系统)精密进近程序,是盲降信号校准的重要指标。TCH是基于理论计算得出的值,通过下滑道角度和下滑台到跑道入口的距离计算生成,属于“纸上谈兵”的理论高度。例如,在RNP AR(要求特殊授权的所需导航性能)进近图中,TCH通常被标注为50FT。2.应用场景与精度RDH是精密进近(如ILS)的核心参数,尤其在III类盲降中,其准确性直接影响自动着陆系统的安全性。ICAO建议优先使用RDH,而美国FAA和杰普逊航图因成本或传统原因仍主要标注TCH。TCH常用于类精密进近(如RNP进近),因为其下滑道由气压高度表模拟生成,受温度影响较大,实际测量RDH意义有限。下面我们参考公司PAD上杰普逊航图和SDA EFB国内航图进行对比。可以看出,我们国内航图大多数ILS进近图中都是标注的RDH,而RNP进近图中大多数都是TCH。杰普逊航图ILS和RNP进近图中大多数都是标注TCH。简单来讲,可以理解为,RDH是盲降信号和跑到入口上方交点处的高度,而TCH是一个基于理论计算得出的值。二、TDZ与TDZE的概念1.TDZ(Touchdown Zone,接地区)ICAO《附件14》给出的定义是:供着陆飞机越过跑道入口后,最早接触的那部分跑道。《B737-NG/MAX飞行机组训练手册》要求的接地区位置为1000英尺至3000英尺或跑道前1/3,以两者中较小的为准。2.TDZE(Touchdown Zone Elevation,接地区标高)是指接地区最高点的标高,即着陆面第一个3000英尺范围内最高点的标高。当被授权可以直线进近到着陆最低标准时,仪表进近图上需要标注TDZE。例如,若跑道入口标高为32米,接地区内存在局部高点,TDZE可能略高于入口标高。TDZE的测量基准仅针对接地区,即入口后300--900米,这也能很好的解释,为什么同一条跑道不同方向的TDZE不一样。例如青岛17号TDZE为30FT,青岛35号TDZE为28FT。三、进近图中的机场标高与入口标高1.机场标高(Airport Elevation)指跑道最高点的高(通常为跑道中线的最高点),用于整体地形参考。例如,济南机场的机场标高为23.1米。运行手册中有写到,MDH是以机场标高为基准,而MDA是以平均海平面为基准。如果入口标高在机场标高之下2米以上,则以入口标高为基准。盘旋进近的MDH是以机场标高为基准。2.入口标高(Threshold Elevation)指跑道入口处的高度,直接影响RDH和TCH的计算。例如,济南机场01号跑道入口标高为23.1米,与机场标高一致。运行手册中也有写到,DH是以入口标高为基准,而DA是以平均海平面为基准。根据《航空器机场运行最低标准的制定与实施规定》(CCAR-97RS-R1)第三十九条规定:在精密进近中规定的决断高为飞机主轮至跑道入口平面的高。即入口标高一般来作为确定DA的基准面。我们来思考这样一个问题:为什么大阪KANSAI机场,两条跑道四个方向的ILS决断高度DA都不一样,而青岛胶东机场同样是双跑道运行,但是ILS决断高度DA都是230FT呢?细心的小伙伴们会发现,这是因为大阪KANSAI机场四个方向的入口标高都不一样,ILS决断高度都是在对应跑道入口标高高度上加200FT。虽然青岛胶东机场也存在入口标高不一样的情况,但是我们有这样一条规定“I类PA、APV 和NPA 通常使用气压高度表作为高度基准。在使用修正海压(QNH)时,DA 或MDA 向上5 米(或10英尺)取整。在使用场压(QFE)时,DH或 MDH 向上5米(或10英尺)取整”。基于此项规定,即使青岛胶东国际机场也存在入口标高不一样的情况,但取整之后ILS决断高度DA都是230FT。但是像一些地形复杂的多跑道运行机场(西安、昆明、贵阳等),也会存在每条跑道ILS决断高度DA不一样的情况。所以在进近过程中,管制指挥临时更换跑道时,要注意最低标准的核实与更改。四、HUD AIII进近的跑道标高选择 在HUD(平视显示器)AIII模式(增强型III类盲降)中,跑道标高的选择需结合以下规则:1.运行限制 我们公司现有两种类型的HGS,分别为HGS 4000(B737NG)和HGS 6000(B737MAX),使用HUD AIII模式时,机场标高通常限制为不超过8600英尺(约2621米),而其他模式无此限制。 下滑角要求HGS 4000 :-2.51°至-3°,HGS 6000:-2.00°至-3.6°,跑道长度需在1525米至5486米之间。2.标高依据SOP中要求输人跑道接地地带标高(TDZE)(如可用)或机场标高。跑道接地地带标高,一般会在机场细则中的跑道物理特征章节里,例如青岛胶东17号TDZE为30FT。但并不是所有的机场都有,例如沈阳桃仙机场细则里就没有TDZE。那么问题又出现了:国内航图机场细则里只有TDZ,却找不到TDZE,这两个是不是一个东西?HUD运行要求我们输入TDZE,但细则里只有TDZ,按照细则里的TDZ输入有没有问题?先说答案,两个是一致的,按照细则里的TDZ输入也没有问题。下面是一些理论支撑。在机场细则里,我们只能找到TDZ,但是在跑道物理特征表格的第一行,对TDZ的定义是“精密进近跑道接地带最高标高(highest elevation of TDZ of precision APP RWY)”。注意上文中最高两字,下面我们再来看一个,飞标司在2012年8月8日发布的《增强飞行视景系统适航与运行批准指南》(下文指南)中对TDZE的定义:是指接地区最高点的标高,即着陆面第一个3000英尺范围内最高点的标高。当被授权可以直线进近到着陆最低标准时,仪表进近图上需要标注TDZE。通过机场细则和指南的对比,我们可以理解,这两个说的是一个高度,都是跑道接地地带的最高标高。总的来讲RDH与TCH:前者基于实测,用于精密进近;后者基于理论,多用于类精密程序。TDZ与TDZE:分别定义接地区域及其高度,对HUD运行有一定影响。机场标高和入口标高:决定非精密进近或类精密进近和精密进近的最低下降高度和高或决断高度和高。标高选择:HUD AIII进近需以跑道接地地带标高为核心。飞行部七大队 李新奇
-
飞行安全中的姿态控制与偏差修正 作者:飞行部十二大队 刘兆然 飞行安全是民航运输永恒的主题,而着陆阶段作为飞行中最复杂、风险最高的环节之一,其安全控制尤为重要。在波音737等现代喷气客机的着陆过程中,"掉机头"(非正常的姿态减小)是一种常见但风险特征复杂的飞行现象。本文将从专业角度系统分析着陆不同阶段的掉机头风险特征、形成机制及修正策略,探讨飞行安全中"时间因素"与"惯性控制"的核心作用,为飞行安全实践提供理论参考。 一、着陆阶段的划分与掉机头风险特征根据飞行状态和操纵特点,737的着陆过程可划分为三个关键阶段,每个阶段的掉机头风险特征截然不同。“高空阶段(80-100尺至40-50尺)”是飞机进入跑道入口前后的准备阶段。飞行员在此阶段评估入口条件、判断下沉趋势并准备拉开始时机。此阶段若出现掉机头(常由收油门稳杆引起),会产生明显的低头力矩,导致飞机加速下沉。但由于高度充足,修正时间相对充裕,风险可控性较好。“中空阶段(40-50尺至15-20尺)”是实施拉开始动作的关键阶段。飞机姿态明显增加但下降率变化不大,这一阶段的目视感觉与实际下沉剖面存在差异——飞行员感觉下降率减小而实际未减。若在此阶段停杆或掉机头,会形成"最隐蔽、最难修正"的偏差:既有足够高度形成危险低头力矩,又缺乏足够时间进行有效修正,重着陆风险极高。“低空阶段(15-20尺至接地)”飞机下降率已明显减小,准备柔和接地。此阶段掉机头由于高度低、下降率小,飞机来不及形成危险下沉就已接地,风险相对最小。关键在于保持姿态稳定,避免接地前突然的杆量输入。 二、掉机头的危险机制与"时间-惯性"定律掉机头的本质危险在于其产生的低头力矩,这是一种使飞机俯仰姿态持续减小的惯性效应。低头力矩的危险性不直接表现为瞬时状态,而是反映在操纵反应的延迟性上——飞行员带杆后需要显著更长时间才能看到下降率改善,这种现象称为"空杆效应"。通过分析不同阶段的掉机头特征,可以发现一个核心规律:风险=形成危险惯性时间/可用修正时间。当某阶段既有足够时间形成危险低头力矩,又缺乏足够修正时间时,风险达到峰值。这正是中空阶段掉机头特别危险的根本原因。这一规律同样适用于解释跳着陆的风险差异:短时间跳起(≤1秒)来不及形成明显低头力矩;长时间跳起(≥3秒)有足够修正时间;而中等时长跳起(约2秒)既能形成危险惯性又缺乏修正时间,成为最危险的状况。三、各阶段掉机头的典型诱因与修正策略“高空阶段掉机头”的典型诱因包括:为修正偏高轨迹或偏前下滑点而主动稳杆;收油门与稳杆同时进行的"收油门稳杆"动作。后者尤为危险,因为油门减小本身就会产生低头力矩,叠加稳杆动作会导致升力急剧减小,形成"强强联合"的加速下沉。修正策略强调"预防优于纠正":在姿态减小和油门减小的先兆阶段就及时干预,避免低头力矩完全形成。教员应建立"第一时间提醒+上手"的反应机制做到100英尺以下无偏差带飞,打破"先提醒后上手"的滞后模式。“中空阶段掉机头”主要表现为拉开始过程中的非预期停杆。由于此阶段目视存在"下降率减小"的错觉,实际飞机仍保持较大下沉率,停杆会导致高度快速消耗。当飞行员意识到问题时,常已进入30尺以下的"修正死区"。应对策略包括:建立"持续、均匀"的带杆手法习惯;教员需特别警惕"起始正常随后停杆"的隐蔽模式,不要等偏差形成了再去修正。“低空阶段掉机头”的主要风险并非下沉率本身,而是接地状态的不稳定。修正重点是保持合理的接地姿态(避免过小)和稳定的杆量输入,防止在最后时刻出现突变的操纵输入。 四、飞行安全的核心:从偏差修正到状态控制现代飞行安全理念正经历从"偏差修正"到"状态控制"的范畴转变,各级模拟机检查都要看落地曲线。传统的事后修正存在固有局限——一旦低头力矩形成,物理规律决定了修正效果必然延迟。最高阶的安全策略是在偏差显现前就维持可控状态,这要求:建立前瞻性监控能力:不仅观察当前状态,更要预判未来3-5秒的趋势变化。低头力矩虽不可见,但可通过姿态变化率和油门状态提前感知。掌握惯性管理艺术:理解不同高度下时间-惯性的辩证关系,在高风险阶段(如中空)预先采取更保守的操纵策略。培养稳定接地理念:掌握姿态冻结的要意,接地品质不仅取决于瞬时参数,更取决于前推3-5秒的状态稳定性。任何最后时刻的修正都应服务于稳定接地的终极目标。五、结语:飞行安全中的时间哲学通过对737着陆掉机头现象的分析,我们得以窥见飞行安全的深层哲学——“安全本质上是与时间的博弈”。那些既给予危险足够形成时间又不提供足够修正时间的"时间陷阱",构成了飞行中最隐蔽的风险。卓越的飞行安全不在于超凡的修正技巧,而在于精准的时间管理和惯性预见。当飞行员能够穿透当前状态的表象,预见未来数秒的惯性演变,并在时间窗口关闭前采取行动时,真正的主动安全才得以实现。这种对"时间-惯性"规律的掌握,正是我们职业飞行员安全素养的核心所在。
-
结合“人机环”模型 与“九项核心胜任力”框架,分析‘人的因素’ 作者:飞行部七大队 杨剑波“人机环”模型简介“人机环”模型是航空安全分析的经典框架,将飞行事件因素分为人、机、环 三大维度及其交互作用。常见因素如下:“人”因素体现为飞行安全的核心变量,包括:生理状态和疲劳状况、情景意识、压力管理、程序执行、技能与知识、规章落实、沟通与冲突、领导力和合作、文化冲突 “机”因素体现为硬件与系统的可靠性,包括:故障影响、系统冗余失效、设计缺陷、设置失误、人机工效缺陷、飞机软件缺陷、维修差错、备件质量、检测盲区“环境”因素体现为运行场景的复杂性,包括:气象威胁如低能见、风切变、结冰条件等复杂气象条件、地形风险、空域复杂性、机场设施保障、其他用户活动、程序设计的不合理、空管指令错误、鸟击和电磁干扰“人机环”交互界面,恰恰是事故链的关键耦合点,举例如下:1.人-机交互自动化矛盾-过度依赖自动驾驶导致技能退化界面认知负荷-玻璃座舱如HUD信息过载2.人-环交互气象误判:目视进近误入IMC条件后决策延迟地形错觉:斜坡跑道导致的五边高距比误读人-人交互跨文化沟通:非英语母语机组与空管之间的术语混淆权威梯度:副驾驶不敢质疑机长,背离挑战相应原则4.机-环交互环境适应性缺陷:高原机场发动机推力衰减未补偿系统抗扰不足:鸟击导致传感器堵塞“九项核心胜任力”框架简介飞行员“九项核心胜任力”是国际民航组织(ICAO)在《飞行员训练手册》中定义的现代飞行员能力框架,旨在超越传统技术操作,全面提升认知、心理、社交三维能力。 飞行员“九项核心胜任力”框架的训练体系,将飞行员技能训练提升为飞行员胜任力的塑造。以持续提升飞行员对“灰犀牛”和“黑天鹅”的风险管控能力为目的,是涵盖理论、人员、设备、规程和支撑系统等相关要素的一种资质管理体系。它们就像安全链条的九个环节,任何一项短板都有可能导致事故链的产生。案例分析:1月18日,某航A320飞机执行杭州-普吉航班,09号跑道RNP进近过程中,机组错误地将本场修正海压1009百帕设置为1029百帕,导致飞机的实际飞行高度低于正常高度591英尺,在距跑道入口2.63海里、无线电高度288英尺时触发TOO LOW TERRAIN警戒,无线电高度221英尺时触发TERRAIN警戒,一秒后触发PULL UP警告,机组执行复飞。该事件构成一起责任原因运输航空一般征候。运用“九项胜任力”框架具体分析“人的因素”:1.程序应用:进近准备实施不规范,驾驶舱信息接收要做到全员传达与知晓,机长未落实修正海压设置程序,而是盲目参考副驾驶的数值进行设置。飞机在1000英尺AFE的语音提醒,机组缺乏同时与修正海压数值的交叉检查。2.情景意识:天气良好且副驾驶发现离海面偏近的情况下,机组缺乏忧患意识,未能引起重视。无线电高度表与气压高度表数据差异显著,机组也没能及时发现。不正常警戒提醒时,机组决策应对的犹豫不决。长航线时,要及时管理疲劳对于情景意识的不利影响。3.沟通:对英语通讯衍生威胁缺乏管理,国外管制员没有主动向机组提供修正海压的数值。接收气象条件未进行有效沟通,落实全员知晓。简令实施缺乏交叉检查。事后未按要求向公司报告复飞原因。4.领导力和团队合作:机长未彰显应有领导力带头落实SOP要求,未重视机组成员提出的飞行疑惑并给予考量。飞行实施过程,未落实团队层面认知目标一致。5.决策和操纵:决策错则操纵错。处置EGPWS警戒决策犹豫,动作迟疑,处置EGPWS警告决策错误,操纵失误。自动化管理、知识应用、工作负荷管理在本案例中权重较低。此次事件分析,对我以后航班生产和训练的启示:1、重视CRM的相互作用——营造互相学习氛围,调动全员积极性,鼓励沟通与提醒的有效交流。航前准备做好任务分解和风险预判。航班运行中,带头落实规章要求,发挥领导力和团队合作精神。做好模拟演练和预案,合理管理工作负荷,确保情景意识,持续监控管理好飞机状态。鼓励成员参与表达意见,共同协商,合理决策。航后及时进行「情境重现-行为-影响-方案优化」模型进行复盘讲评,构成能力成长闭环。2、树立程序正义思维——SOP是航空百年安全经验结晶。严格执行才能够避免人为失误,实现操作可预测性,有效应对突发特情,跨越差异畅通协作。建立「程序正义」思维,破除经验主义,行动上落实标准化,交叉检查机制和挑战/响应原则。以慢求稳,以动治动,彰显应有胜任力。3、强化安全理念——增强忧患意识,坚持底线思维。忧患意识能帮助我们去预见藏在暗处的潜在危机,底线思维是守住最后的防线。真正的安全不是“零差错”,而是当所有防线崩塌时,仍有最后一道无法摧毁的闸门——这便是底线思维锻造的“终极护盾”。