搜索到
135
篇与
的结果
-
 浅析风切变 作者: 飞行部二大队耿 跃一、背景低空风切变被称为是飞行的“无形杀手” 。有资料表明,自1943年以来,全球范围内与低空风切变相关的飞行事故导致了一千四百多人遇难。1970年至1985年期间,至少发生了30起与低空风切变相关的飞行事故,导致七百多人遇难,其中着陆28起,起飞2起。据国际民航组织(ICAO)统计,大约30%的空难由天气原因引起或者与天气因素有关,其中低空风切变是最危险的因素之一。来自美国国家运输安全委员会(NTSB)的数据表明:自1975年以来,在美国由于天气原因造成的恶性空难事故中,80%是低空风切变造成的二、风切变的介绍1.定义:风切变 : 风向或风速的快速变化严重风切变:风向或风速的快速变化导致空速的变化大于15海里/小时或垂直速度的变化大于150米(500英尺)/分钟。2、低空风切变形成的原因:低高度的风速风向变化会对飞机起降造成严重的危害,这些变化是由各种气象条件所引起的,如:地形条件,逆温现象,海陆风,锋面系统,强地面风。最严重的风切变往往伴随着雷暴和阵雨产生。1.雷暴2.微下击暴流3.其他情况:地形、锋面、海陆风等三、风切变的危害1、可控飞行撞地(CFIT)风险。机组未严格落实风切变机动改 出程序要求(推力、姿态相关要求),未使用最大推力或盲目收油 门,使飞机能量不足以改出风切变,不能形成足够的正上升率,极易造成飞机长时间处于风切变、“失速”掉高度、甚至有可控撞地风险。2、“擦尾及冲偏出跑道”风险。机组操纵飞机在大风乱流低高度阶段易进入管道效应,决断意识不强,如果机组注意力分配不当、偏差发现偏晚以及标准喊话不及时,当风切变警告发生时,机组可能会处置动作迟缓,造成飞机二次接地、擦尾以及冲偏出跑道风险。3、“五防”类风险。风切变机动飞行是复杂状态改出、是一种特情处置,如果机组未针对大风乱流天气制定风切变及复飞相关预案, 极易造成飞机突破管制员指令高度、飞错复飞程序或轨迹以及 TCAS 冲突等风险。4、“设备”类使用超限风险。风切变机动飞行处置不当,比如: 未按手册规定按压 TOGA 电门,未保持起始姿态 15°(注:低高度复飞姿态要求除外),导致飞机在风切变改出及后续复飞过程中,长时间处于姿态及油门不匹配的异常状态中,极易造成空速快速增加超过襟翼使用空速限制。5、“颠簸伤人”风险。机组在完成风切变机动改出动作时,动作粗猛,姿态、油门瞬间输出变化量过大,易造成机体结构过载以及旅 客受伤等不安全事件发生。四、ND上预测风切变显示和符号五、风切变的分类六、雷达探测原理七、探测区高度 2300 英尺以下,在飞机的起飞和着陆过程中,无论雷达打开或关闭,都会启动前视风切变功能。在启动之后,天气扫描区范围将下降到 120 度,以便更快实现天气和风切变信息的更新。在 1200 英尺以下和 5 海里范围内,在驾驶舱内显示报警信息。如果在 MAP 或 TEST 方式雷达接通并且系统探测到风切变事件,则系统显示自动变为 WX+T 方式来显示气象和风切变符号。所选范围不会自动改变。预测风切变抑制条件1、预测风切变报警会被实际的风切变警告(飞机在风切变中)、前视地形报警、或基于无线电高度的警报抑制。2、起飞和着陆过程中,新的预测风切变警戒报警在80海里/小时和400英尺无线电高度之间被抑制,新的警告报警在100海里/小时和50英尺的无线电高度之间被抑制。这些抑制不能消除现有的预测风切变报警。如果警告/警戒事件出现在那些边界前,警告/警戒将会保留在显示上且会出现完整的音响喊话。如图所示:这是一个关于风切变警告警戒的概述图起飞时,从起飞滑跑开始(0海里/小时)直到飞机达到80海里/小时, 警告和警戒都可用。从80海里/小时直到飞机达到100海里/小时,只有警告可用。从400英尺到1200英尺,警告和警戒都可用。从飞机达到100海里/小时直到50英尺期间所有新报警不可用。下降时,在飞机穿 过 1200 英尺到 400 英尺期间,警告和警戒可用,从 400 英尺到 50 英 尺期间只有警告可用。从 50 英尺直到接地(0 英尺),所有新报警都不可用。EGPWS探测的风切变警告(WINDSHEAR)不受抑制。九、风切变的处置1、避开如确认或怀疑存在风切变,应绕飞、延迟起飞或中止进近。a)当飞行员在气象报文中看到以下信息时,需特别注意: 雷暴、强降水、扬尘、温度露点差较大(差值越大,湿度越低), 包括其它线索如阵风、温度变暖趋势、积云等。b)地面风切变探测系统c)机载风切变警告系统d)风切变的目视迹象e)飞行员报告飞行员不能过于依赖从驾驶舱目视观察来发现风切变。虽然风切变本身不会被目视观测,但是它形成的效果是可以被观测到的。1)夜晚,闪电也许是唯一的目视线索2)白天,以下线索可以为飞行员提供一定的参考:预防预防措施应充分考虑推力、跑道、襟翼、速度、自动设备的影响,做出合适的选择。在很多情况下,飞行员需要仔细权衡,选择当前最佳预防措施。1)起飞时,避免在阵风期间抬轮。如果VR附近遇到阵风,如空速指示迟钝或空速指示急增,瞬间延迟抬轮。这一稍微延迟抬轮可使飞机有额外的时间在阵风中加速,并且增加的空速能提高机尾离地裕度。不要过早抬轮或使用比正常抬轮率大的速率来试图离地和减小阵风的影响,因为这样会降低机尾离地裕度。按需限制驾驶盘的输入,保持机翼水平。过量使用驾驶盘增加扰流板放出量,导致机尾离地高度减小。所有这些要素提供了最大的能量,使飞机在阵风中增速的同时保持了飞机在离地时的机尾离地高度。在此点飞机处于带有侧滑的杆舵交叉状态。离地后慢慢使驾驶盘和方向舵回中,可使飞机缓慢平稳地从侧滑中改出。2)进近和着陆3、改出4、1)风切变警戒:2)风切变警告注:起飞滑跑过程中遇到风切变:如果在V1前遇到风切变,在V1时执行中断起飞则跑道长度可能不够。速度达到VR时,以正常速率抬轮至15度俯仰姿态。一旦升空,执行风切变脱离机动飞行。如果在接近正常抬轮速度时遇到风切变并且空速突然下降,也许剩余的跑道不足以加速至正常起飞速度。如果没有足够长的跑道让飞机停止,即使空速很低,也要在距离跑道末端至少2,000英尺处正常抬轮。在剩余跑道上需要高于正常姿态离地。确保调定最大推力。(当跑道边灯由白色变为黄色时,代表剩余跑道长度为2000英尺)3)进近中的风切变警戒4)进近中的风切变警告5)不可接受的飞行轨迹偏离不可接受的飞行轨迹偏离是指1000英尺AGL以下,正常稳定的飞行状态发生不可控制的变化,超出下列任一情况:15海里/小时指示空速500英尺/分钟垂直速度5°俯仰姿态偏离下滑道 1 个点在较长一段时间内,油门杆位置不正常。6)风切变脱离机动飞行备注:随着空速的减小,向后的带杆力会增加。在所有情况下,导致间歇抖杆或起始抖振的俯仰姿态是俯仰姿态的上限。可能要求间歇性抖杆飞行,以获得足够的地形间隔。柔和、稳定的操纵可避免俯仰姿态过量或失速。注:如果EEC在正常方式,将推力手柄前推到底可获得最大推力。如果即将触地,将推力手柄前推到底。不要超出俯仰限制指示。如果TO/GA不可用,脱开自动驾驶和自动油门,人工飞行。警告:严重风切变可能超出AFDS的性能。 准备断开自动驾驶和自动油门并人工飞行。(十)风切变的知识点1、风切变中指引的工作原理自动驾驶仪与飞行指引仪,提供可靠的修正动作,来抵消大多数风切变。自动油门系统用对速度的任何增、减提供快速响应的方法,也对风切变改出进行支援。一般飞行员会认为指令的动力等级超出必要值,但实际上是情况所需要的动力。起飞或复飞当用F/D起飞或复飞时,如遭遇风切变,F/D俯仰指令杆将提供指令以保持目标速度,直到垂直速度降至约+600英尺/分钟。此时,F/D俯仰杆指令15度上仰姿态。如垂直速度继续下降,F/D继续指令一个15度的俯仰姿态,直到达到大约的抖杆速度。它随后指令俯仰姿态,这将导致抖杆器间断性的工作。在飞机通过风切变的情况时,F/D程序将被颠倒过来。当爬升率增至高于约+600英尺/分钟,F/D指令俯仰姿态,其结果是加速回到目标速度。当A/P或F/D复飞时,A/P与F/D二者均以类似的方式工作。进近和着陆当做ILS进近时,如遭遇风切变,F/D与A/P均力图保持飞机高度或在截获下滑道后保持下滑道,而不考虑迎角或抖杆器的限制。如果飞行员不采取按压TO/GA电门或断开自动驾驶而进行人工飞行的干涉措施,空速可能会低于抖杆速度并且进入失速。2、风切变机动飞行时,如何判断飞机脱离风切变?PFD上的目视警告显示是否可以作为相应的依据PFD上显示的“WIND SHEAR”目视警告信息,在1500ft AGL下激活显示,语音报警只激活一次,但是目视警告信息会一直持续到飞机脱离该次风切变;该警告信息一旦1500英尺一下被激活,在整个风切变改出机动飞行中都有效,尽管高度已经突破1500ft AGL。该目视警告信息可作为脱离风切变的参考依据之一,但不可以作为唯一依据,建议必须还要根据飞机的实际飞行状态进行综合判断,因为前方的飞行条件未知,飞机有可能会进入另一个风切变。综合波音意见和手册信息,脱离风切变后的操作:风切变警告消失后(包括驾驶舱语音警告和 PFD下方红色WINDSHEAR目视警告),不可接受的飞行轨迹偏离不再继续,并且速度和上升率开始明显增加,机组确认飞机正在恢复正常飞行时,可认为飞机已脱离风切变:3.进近风切变(防止襟翼超速)4、脱离风切变后的机动飞行动作风切变机动飞行时超出襟翼限制速度是可接受的,脱离风切变以后进行正常的复飞动作程序,经证实,脱离风切变后增速收襟翼时,波音不建议收油门来避免超速的情况,特别是在高度较低时,因为前方气象条件未知,有可能会使飞机进入另一个风切变,只是及时的控制飞机姿态,根据速度收襟翼,根据正上升率收起落架执行正常的复飞程序。5、起飞滑跑时遭遇顺风切变,空速不增加,飞行员延迟抬轮时机,最晚于跑道末端2000ft时抬轮,这样在高原机场大重量高温时,很容易造成轮胎超速,该如何应对?首先是跑道末端2000ft英尺抬轮,对于足够长的跑道,不一定要到跑道末端2000英尺速度就满足了,但是对于超轮速的情况,波音性能代表和飞行员的相关解释是飞机的轮速涉及已经考虑到该问题,飞机的验证限制大约达到当前轮速限制的1.4倍左右,确定可以提供足够的安全裕度,起飞后正常执行程序即可。爆胎的情况,飞行员可以第一时间感觉到,所以当出现爆胎的情况时,建议飞行员根据实际状态选择是否收上起落架。6、非正常机动飞行-风切变 “改平机翼的同时抬机头至起始俯仰姿态15°”,如何理解“起始俯仰姿态15°?是始终保持还是要参考升降速度指示,在低高度和高高度有什么区别? 检查单机动飞行章节很明确,按检查单执行。15°为起始姿态,不是要求始终保持15°姿态,风切变改出允许间歇性抖杆,不能持续抖杆。在临界的低高度情况下,如果可能以空速换取高度。
浅析风切变 作者: 飞行部二大队耿 跃一、背景低空风切变被称为是飞行的“无形杀手” 。有资料表明,自1943年以来,全球范围内与低空风切变相关的飞行事故导致了一千四百多人遇难。1970年至1985年期间,至少发生了30起与低空风切变相关的飞行事故,导致七百多人遇难,其中着陆28起,起飞2起。据国际民航组织(ICAO)统计,大约30%的空难由天气原因引起或者与天气因素有关,其中低空风切变是最危险的因素之一。来自美国国家运输安全委员会(NTSB)的数据表明:自1975年以来,在美国由于天气原因造成的恶性空难事故中,80%是低空风切变造成的二、风切变的介绍1.定义:风切变 : 风向或风速的快速变化严重风切变:风向或风速的快速变化导致空速的变化大于15海里/小时或垂直速度的变化大于150米(500英尺)/分钟。2、低空风切变形成的原因:低高度的风速风向变化会对飞机起降造成严重的危害,这些变化是由各种气象条件所引起的,如:地形条件,逆温现象,海陆风,锋面系统,强地面风。最严重的风切变往往伴随着雷暴和阵雨产生。1.雷暴2.微下击暴流3.其他情况:地形、锋面、海陆风等三、风切变的危害1、可控飞行撞地(CFIT)风险。机组未严格落实风切变机动改 出程序要求(推力、姿态相关要求),未使用最大推力或盲目收油 门,使飞机能量不足以改出风切变,不能形成足够的正上升率,极易造成飞机长时间处于风切变、“失速”掉高度、甚至有可控撞地风险。2、“擦尾及冲偏出跑道”风险。机组操纵飞机在大风乱流低高度阶段易进入管道效应,决断意识不强,如果机组注意力分配不当、偏差发现偏晚以及标准喊话不及时,当风切变警告发生时,机组可能会处置动作迟缓,造成飞机二次接地、擦尾以及冲偏出跑道风险。3、“五防”类风险。风切变机动飞行是复杂状态改出、是一种特情处置,如果机组未针对大风乱流天气制定风切变及复飞相关预案, 极易造成飞机突破管制员指令高度、飞错复飞程序或轨迹以及 TCAS 冲突等风险。4、“设备”类使用超限风险。风切变机动飞行处置不当,比如: 未按手册规定按压 TOGA 电门,未保持起始姿态 15°(注:低高度复飞姿态要求除外),导致飞机在风切变改出及后续复飞过程中,长时间处于姿态及油门不匹配的异常状态中,极易造成空速快速增加超过襟翼使用空速限制。5、“颠簸伤人”风险。机组在完成风切变机动改出动作时,动作粗猛,姿态、油门瞬间输出变化量过大,易造成机体结构过载以及旅 客受伤等不安全事件发生。四、ND上预测风切变显示和符号五、风切变的分类六、雷达探测原理七、探测区高度 2300 英尺以下,在飞机的起飞和着陆过程中,无论雷达打开或关闭,都会启动前视风切变功能。在启动之后,天气扫描区范围将下降到 120 度,以便更快实现天气和风切变信息的更新。在 1200 英尺以下和 5 海里范围内,在驾驶舱内显示报警信息。如果在 MAP 或 TEST 方式雷达接通并且系统探测到风切变事件,则系统显示自动变为 WX+T 方式来显示气象和风切变符号。所选范围不会自动改变。预测风切变抑制条件1、预测风切变报警会被实际的风切变警告(飞机在风切变中)、前视地形报警、或基于无线电高度的警报抑制。2、起飞和着陆过程中,新的预测风切变警戒报警在80海里/小时和400英尺无线电高度之间被抑制,新的警告报警在100海里/小时和50英尺的无线电高度之间被抑制。这些抑制不能消除现有的预测风切变报警。如果警告/警戒事件出现在那些边界前,警告/警戒将会保留在显示上且会出现完整的音响喊话。如图所示:这是一个关于风切变警告警戒的概述图起飞时,从起飞滑跑开始(0海里/小时)直到飞机达到80海里/小时, 警告和警戒都可用。从80海里/小时直到飞机达到100海里/小时,只有警告可用。从400英尺到1200英尺,警告和警戒都可用。从飞机达到100海里/小时直到50英尺期间所有新报警不可用。下降时,在飞机穿 过 1200 英尺到 400 英尺期间,警告和警戒可用,从 400 英尺到 50 英 尺期间只有警告可用。从 50 英尺直到接地(0 英尺),所有新报警都不可用。EGPWS探测的风切变警告(WINDSHEAR)不受抑制。九、风切变的处置1、避开如确认或怀疑存在风切变,应绕飞、延迟起飞或中止进近。a)当飞行员在气象报文中看到以下信息时,需特别注意: 雷暴、强降水、扬尘、温度露点差较大(差值越大,湿度越低), 包括其它线索如阵风、温度变暖趋势、积云等。b)地面风切变探测系统c)机载风切变警告系统d)风切变的目视迹象e)飞行员报告飞行员不能过于依赖从驾驶舱目视观察来发现风切变。虽然风切变本身不会被目视观测,但是它形成的效果是可以被观测到的。1)夜晚,闪电也许是唯一的目视线索2)白天,以下线索可以为飞行员提供一定的参考:预防预防措施应充分考虑推力、跑道、襟翼、速度、自动设备的影响,做出合适的选择。在很多情况下,飞行员需要仔细权衡,选择当前最佳预防措施。1)起飞时,避免在阵风期间抬轮。如果VR附近遇到阵风,如空速指示迟钝或空速指示急增,瞬间延迟抬轮。这一稍微延迟抬轮可使飞机有额外的时间在阵风中加速,并且增加的空速能提高机尾离地裕度。不要过早抬轮或使用比正常抬轮率大的速率来试图离地和减小阵风的影响,因为这样会降低机尾离地裕度。按需限制驾驶盘的输入,保持机翼水平。过量使用驾驶盘增加扰流板放出量,导致机尾离地高度减小。所有这些要素提供了最大的能量,使飞机在阵风中增速的同时保持了飞机在离地时的机尾离地高度。在此点飞机处于带有侧滑的杆舵交叉状态。离地后慢慢使驾驶盘和方向舵回中,可使飞机缓慢平稳地从侧滑中改出。2)进近和着陆3、改出4、1)风切变警戒:2)风切变警告注:起飞滑跑过程中遇到风切变:如果在V1前遇到风切变,在V1时执行中断起飞则跑道长度可能不够。速度达到VR时,以正常速率抬轮至15度俯仰姿态。一旦升空,执行风切变脱离机动飞行。如果在接近正常抬轮速度时遇到风切变并且空速突然下降,也许剩余的跑道不足以加速至正常起飞速度。如果没有足够长的跑道让飞机停止,即使空速很低,也要在距离跑道末端至少2,000英尺处正常抬轮。在剩余跑道上需要高于正常姿态离地。确保调定最大推力。(当跑道边灯由白色变为黄色时,代表剩余跑道长度为2000英尺)3)进近中的风切变警戒4)进近中的风切变警告5)不可接受的飞行轨迹偏离不可接受的飞行轨迹偏离是指1000英尺AGL以下,正常稳定的飞行状态发生不可控制的变化,超出下列任一情况:15海里/小时指示空速500英尺/分钟垂直速度5°俯仰姿态偏离下滑道 1 个点在较长一段时间内,油门杆位置不正常。6)风切变脱离机动飞行备注:随着空速的减小,向后的带杆力会增加。在所有情况下,导致间歇抖杆或起始抖振的俯仰姿态是俯仰姿态的上限。可能要求间歇性抖杆飞行,以获得足够的地形间隔。柔和、稳定的操纵可避免俯仰姿态过量或失速。注:如果EEC在正常方式,将推力手柄前推到底可获得最大推力。如果即将触地,将推力手柄前推到底。不要超出俯仰限制指示。如果TO/GA不可用,脱开自动驾驶和自动油门,人工飞行。警告:严重风切变可能超出AFDS的性能。 准备断开自动驾驶和自动油门并人工飞行。(十)风切变的知识点1、风切变中指引的工作原理自动驾驶仪与飞行指引仪,提供可靠的修正动作,来抵消大多数风切变。自动油门系统用对速度的任何增、减提供快速响应的方法,也对风切变改出进行支援。一般飞行员会认为指令的动力等级超出必要值,但实际上是情况所需要的动力。起飞或复飞当用F/D起飞或复飞时,如遭遇风切变,F/D俯仰指令杆将提供指令以保持目标速度,直到垂直速度降至约+600英尺/分钟。此时,F/D俯仰杆指令15度上仰姿态。如垂直速度继续下降,F/D继续指令一个15度的俯仰姿态,直到达到大约的抖杆速度。它随后指令俯仰姿态,这将导致抖杆器间断性的工作。在飞机通过风切变的情况时,F/D程序将被颠倒过来。当爬升率增至高于约+600英尺/分钟,F/D指令俯仰姿态,其结果是加速回到目标速度。当A/P或F/D复飞时,A/P与F/D二者均以类似的方式工作。进近和着陆当做ILS进近时,如遭遇风切变,F/D与A/P均力图保持飞机高度或在截获下滑道后保持下滑道,而不考虑迎角或抖杆器的限制。如果飞行员不采取按压TO/GA电门或断开自动驾驶而进行人工飞行的干涉措施,空速可能会低于抖杆速度并且进入失速。2、风切变机动飞行时,如何判断飞机脱离风切变?PFD上的目视警告显示是否可以作为相应的依据PFD上显示的“WIND SHEAR”目视警告信息,在1500ft AGL下激活显示,语音报警只激活一次,但是目视警告信息会一直持续到飞机脱离该次风切变;该警告信息一旦1500英尺一下被激活,在整个风切变改出机动飞行中都有效,尽管高度已经突破1500ft AGL。该目视警告信息可作为脱离风切变的参考依据之一,但不可以作为唯一依据,建议必须还要根据飞机的实际飞行状态进行综合判断,因为前方的飞行条件未知,飞机有可能会进入另一个风切变。综合波音意见和手册信息,脱离风切变后的操作:风切变警告消失后(包括驾驶舱语音警告和 PFD下方红色WINDSHEAR目视警告),不可接受的飞行轨迹偏离不再继续,并且速度和上升率开始明显增加,机组确认飞机正在恢复正常飞行时,可认为飞机已脱离风切变:3.进近风切变(防止襟翼超速)4、脱离风切变后的机动飞行动作风切变机动飞行时超出襟翼限制速度是可接受的,脱离风切变以后进行正常的复飞动作程序,经证实,脱离风切变后增速收襟翼时,波音不建议收油门来避免超速的情况,特别是在高度较低时,因为前方气象条件未知,有可能会使飞机进入另一个风切变,只是及时的控制飞机姿态,根据速度收襟翼,根据正上升率收起落架执行正常的复飞程序。5、起飞滑跑时遭遇顺风切变,空速不增加,飞行员延迟抬轮时机,最晚于跑道末端2000ft时抬轮,这样在高原机场大重量高温时,很容易造成轮胎超速,该如何应对?首先是跑道末端2000ft英尺抬轮,对于足够长的跑道,不一定要到跑道末端2000英尺速度就满足了,但是对于超轮速的情况,波音性能代表和飞行员的相关解释是飞机的轮速涉及已经考虑到该问题,飞机的验证限制大约达到当前轮速限制的1.4倍左右,确定可以提供足够的安全裕度,起飞后正常执行程序即可。爆胎的情况,飞行员可以第一时间感觉到,所以当出现爆胎的情况时,建议飞行员根据实际状态选择是否收上起落架。6、非正常机动飞行-风切变 “改平机翼的同时抬机头至起始俯仰姿态15°”,如何理解“起始俯仰姿态15°?是始终保持还是要参考升降速度指示,在低高度和高高度有什么区别? 检查单机动飞行章节很明确,按检查单执行。15°为起始姿态,不是要求始终保持15°姿态,风切变改出允许间歇性抖杆,不能持续抖杆。在临界的低高度情况下,如果可能以空速换取高度。 -
目视盘旋进近该如何复飞? 作者:飞行部五大队韩林强当前民航局正在大力提倡各机场实施目视进近程序,由此想到了由目视进近延伸出来的另一个特殊的目视飞行方式,就是目视盘旋进近。目视盘旋进近的程序相对来说比较简单,也很容易理解,但在盘旋进近过程中丢失目视参考该如何复飞对大多数飞行员来说比较模糊,下面我们就来探讨一下目视盘旋进近的复飞。首先明确一下概念,目视盘旋进近(Visual Maneuvering (Circling))是仪表进近程序的延伸,飞行员在完成仪表进近程序下降保持MDA后,目视机动至一条不同方向的跑道上着陆。其最大特点在于没有固定的飞行航线,航图上仅标注保护区和最低标准,赋予了飞行员较高的操纵自由度。然而,这种自由度也带来了一个关键问题:在姿态多变、位置灵活的盘旋过程中,若突然失去目视参考(如遭遇平流雾、突然降水或夜间灯光不足),应该如何安全规范地执行复飞?一、规章溯源:空白与依据这个问题表面看起来简单,但细想会发现有很大风险。2002年4月15日某航在釜山机场因恶劣天气,由36L跑道仪表程序改为18R跑道目视盘旋进近,后因丢失目视参考飞出了保护区,在18R跑道入口端以北4.6公里的山上坠毁造成严重事故。如果机组当时在失去目视参考的时候果断复飞就可以避免悲剧的发生,这起事件也充分说明了目视盘旋进近的高风险性 。按照正常情况来说,复飞程序通常会在进近航图里有明确的描述,但目视盘旋比较特殊,它没有固定的飞行程序,航图中也没有标注,通常只会在仪表进近图的右下角标注一个目视盘旋的最低标准和能见度要求。查阅中国民航规章(CCAR),对这种问题的具体操作指导也较为欠缺。只有《航空器运行目视和仪表飞行程序设计规范》中提到了一句话:“目视机动飞行的复飞保护区规范还没有制定”。这句话却让飞行员产生无限的遐想和可能,是不让飞目视盘旋还是盘旋不让复飞?或者你想怎么飞就怎么飞?然而,国际民航组织(ICAO)的规范提供了清晰的标准。以下是ICAO8168文件的描述:翻译过来的内容是:7.4.1当进行盘旋进近失去目视参考时,必须按照特定程序所规定的复飞程序进行操作。飞行员应朝着陆跑道进行初始爬升转弯,并飞越机场上空。此时飞行员应使飞机沿着复飞航径爬升7.4.2 该盘旋动作可以沿多个方向进行,采用不同的机动路线将飞机引导至规定的复飞航线取决于飞机失去目视参考时所处的位置。公司手册描述:盘旋进近机动飞行始终保持目视参考;盘旋进近机动必须在盘旋进近保护区内;盘旋进近复飞时,除非有特殊的复飞程序或ATC指挥,爬升并转向“着陆跑道”,加入之前仪表进近程序的复飞程序。与ICAO 规范中的描述也是一致的,只要在最低下降高度以上,在保护区内盘旋,没有固定的航线要求,理论上可以按照任意预期的路线飞行。通常比较常见的目视盘旋是通过一头跑道的仪表进近程序下降高度,然后目视盘旋到反向跑道落地,如同起落航线的方式飞行,如下图A的样子:现实中还有很多不同的盘旋进近,比如上图中B,C,D的目视盘旋进近,一般这些进近方式都会有详细的说明或者会制作专门的航图,但这些盘旋进近一旦复飞,盘旋机动可能会更为复杂,复飞路线很可能会有多方向的机动才能加入之前的仪表进近复飞程序。二、核心复飞原则先说一下目视盘旋保护区的概念,它是以各跑道入口为圆心,根据不同进近速度的飞机分类,采用不同的半径画圈计算而出的,以B737飞机为例机动盘旋保持襟翼15,最大盘旋进近速度大约160Kt,根据ICAO的标准,盘旋保护区半径是4.2NM,而按照FAA之前的标准却是2.3NM,但是FAA在2013年通过TERPS修改了盘旋保护区的标准,保护区半径的大小取决于飞机的类别和盘旋高度,如果使用新标准会在航图上CIRCLE-TO-LAND最低标准框内标注“空心C”图标。釜山机场采用FAA旧标准,盘旋保护区为2.3NM。 综合国际规范和公司手册的内容可提炼出目视盘旋复飞的三个核心原则:执行初始仪表进近的复飞程序立即开始复飞爬升,并在保护区内进行复飞机动首先转向跑道/机场上空,再机动加入之前仪表进近复飞程序。上图是多跑道或交叉跑道目视盘旋复飞的情况,根据飞机盘旋进近所处的位置不同,虽然复飞机动方向多变,但比较容易理解,反而令大家困惑的是单条跑道盘旋进近一旦失去目视参考该如何复飞,这个问题在平时的训练中也没有统一的标准答案,下面我们就重点讨论一下这种情况。还是以釜山机场为例,下图是釜山机场18R跑道目视盘旋进近路线图,根据釜山机场目视盘旋程序的规定,目视盘旋只能在跑道西侧进行,并且建议三边宽度不超过2NM,如果超过2NM就与下图中点2位置的山头太近(标高800ft),有地形风险。飞机沿36L跑道仪表进近然后18R跑道盘旋落地,仪表进近下降到MDA(1040ft,MCP高度窗调1100ft),保持襟翼15,然后正切下图点3的位置左转三边加入目视盘旋。三边宽度的掌握非常关键,太宽容易飞出保护区,太窄三转弯坡度太大。根据转弯半径公式:r=V²/g.tanθ, (g=9.8m/s ,θ为转弯坡度),假设地速160Kt,坡度25度带入公式,可得转弯半径大约0.8NM,那么三边宽度1.6NM比较合适,如果三边有左侧风,可以适当增大一点,但不要超过2NM。根据复飞三原则,如果盘旋期间发生了复飞,就需要加入36L的仪表复飞程序复飞,而不能使用18R跑道的复飞程序。当飞机位置在A点或者三边上任意一点失去目视参考需要复飞,沿白色路线右转机场上空并建立初始爬升,在跑道上空加入36L仪表复飞程序,这种是最容易机动加入复飞程序的情况;如果在B点(四边)失去目视参考,就有两种不同的情况了,如果飞机当前位置没有地形影响,并且可以通过简单的机动转弯加入之前的仪表进近复飞程序那就可以直接加入,但如果这个位置有地形的风险,那最安全的方法就是继续转向机场上空,并建立初始爬升,再右转180度加入程序,当然也可以在保护区内穿越五边后再右转180度加入程序;但是当飞机在五边C点失去目视参考,大家可能就觉得非常别扭了,因为这个时候飞机的航向与复飞航线方向是相反的,因此这个时候沿跑道方向,爬升到MDA以上,在盘旋保护区内沿红色路线右转180度或者左转180度加入程序都是可以的。所以总结一句话就是,复飞转向机场上空永远是最安全的!三、原则背后的运行逻辑与原理复飞三条原则基于最根本的飞行安全理念:确保始终处于安全保护区之内,保证越障裕度。1.为何使用“初始”而非“目标”跑道的复飞程序?初始仪表进近及其复飞程序是经过精密计算、审批认证的唯一确定性安全路径。目视盘旋区是保护区,但其内的飞行路径是不固定的。复飞就是要立即回到那条绝对安全的“逃生通道”上。 另外, 统一使用初始程序的复飞路线,有助于管制员指挥和协调其他航空器,避免与其它航空器产生冲突。2.为何必须“立即开始爬升”?目视盘旋高度通常较低,地形和障碍物风险急剧升高。任何犹豫和平飞都会压缩安全余度。立即爬升是应对潜在障碍威胁的最直接反应。这与非精密进近中广泛应用的CDFA(连续下降最后进近)技术理念也是一致的:复飞即开始爬升,无需平飞至某个特定点。3.为何要“先转向跑道”,而不是直飞复飞点?这是最核心也是最精妙的设计。目视盘旋保护区是以各跑道入口为圆心划定的圆形区域。复飞时若试图以最短路径直飞复飞程序的某个点,极有可能在加入程序前就飞出了保护区的边界,闯入未经过障碍物评估的空域,风险巨大。机场或跑道上空是保护区评估的核心区域,安全余度最大。先转向这里,能确保飞机在最短时间内抵达最安全的空域。四.总结与建议目视盘旋进近是一种高情境意识的飞行方式,其复飞程序更考验飞行员对底层安全原则的理解,而非对固定程序的机械执行,因此做好以下四点可以让我们在做盘旋进近复飞时更能沉着应对。预案优先: 在执行目视盘旋前,必须做好简令复飞预案。明确:“一旦失去目视参考,我将立即执行XX跑道的复飞程序,先转向跑道,再加入程序。”技术娴熟: 巩固程序转弯、基线转弯等标准仪表机动能力,这是在机场上空调整航向、加入程序的基本功。善用设备: 利用FMC设备FIX页面打距离弧的方式能够清晰的展示目视盘旋保护区,为飞行员提供重要的空间位置和越障情景意识。遵守原则: 牢记“爬升、转向、加入”的三部曲。在确保越障安全的前提下,这些原则提供了最大的灵活性和安全性。由于国内外各个机场的导航设施都非常先进完善,除极个别机场外,盘旋进近在民航客运飞行中已经很少见了,所以大多数人对目视盘旋进近的了解只停留在运行标准和概念上,对具体的细节了解不多。不常用不代表不用,尤其是盘旋进近的复飞,掌握其复飞原理,是飞行员深刻理解飞行程序设计与安全逻辑的重要体现,可以让我们在应对突发状况需要复飞时变得更加游刃有余,大大保证安全裕度。
-
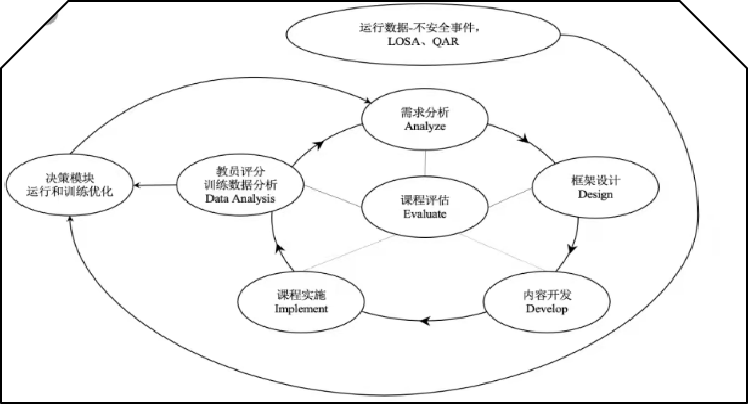
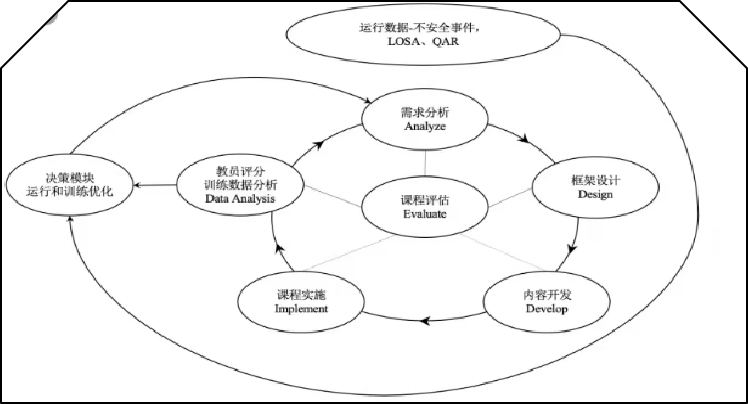
“TEM”框架下双循环数据驱动EBT训练 长处与应用研究 作者:安全监察部 杨钧一、引言随着中国民航运行量持续增长与运行环境复杂化,传统以特情处置和机动操作为核心的“勾选框”式训练模式,难以应对现代航空运行中系统性、复合性风险的挑战。国际民航组织(ICAO)倡导的循证训练(EBT)作为一种以数据为驱动、以胜任力为基础的新型训练范式,其成功实施的关键在于构建了一套内、外双循环数据驱动的动态课程开发与胜任力提升机制。本文以某航“2·9”跑道外接地事件为案例,结合中国民航EBT(循证训练)双循环数据驱动机制与威胁与差错管理(TEM)模型,深入剖析了事件中暴露的机组胜任力短板与系统性风险。研究依托“外循环”识别训练需求,借助“内循环”实现针对性胜任力提升与效果验证,构建了“数据驱动-风险识别-训练映射-安全闭环”的动态治理框架。本文重点论证了EBT双循环模型在提升训练针对性、前瞻性和系统性方面的显著优势,为民航安全实现“以训练防风险、以训练促安全”提供了理论与实践依据。二、EBT双循环模型与TEM理论框架(一)EBT双循环模型架构EBT的双循环数据驱动机制是其核心优势所在:外循环(运行数据→训练需求)通过采集QAR数据、SMS信息报告、事件调查、LOSA审计等行业数据,精准识别当前最高频、最高风险的安全威胁与机组短板,确保训练需求源于真实数据。内循环(训练数据→优化反馈)在模拟机训练中收集学员的胜任力评估数据(基于9大核心胜任力)、教员观察记录和客观飞行参数,用于评估学员的关键胜任力欠缺,并进行针对性情景模拟,确保训练措施的有效性,发现新的风险趋势,为课程迭代提供依据。内外双循环数据通过ADDIE模型分析、设计、开发、实施、评估进行场景研发,利用外循环提供的数据,精准识别风险源而确定训练需求,在民航局已经公布的训练主题基础上有针对性的设计课程,在EBT训练实施过程中,通过第一课的模拟机教员评估,准确确定需要提高的关键胜任力,作为后续课程情景模拟SBT中的目标胜任力,提升学员相应的胜任力,进而反哺航班生产。同时在局方公布的训练主题基础上,胜任力的训练是周期循环的,其后的半年复训,将根据上一个半年复训的训练结果和最新的安全分析结果对“目标胜任力”进行调整,促成受训人员整体核心胜任力的提升。实现“训练向生产要数据,生产向训练要安全”的安全闭环,确保训练课程是一个动态进化、持续改进的有机体。(二)TEM分类法分析模型TEM是一种安全管理的方法,是在(外部因素)和差错(人)危及安全之前,通过飞行员所展现的核心胜任力,形成针对威胁和差错的个人和团队的对策,有助于从运行的角度理解在动态和具有挑战性的运行环境中,人的绩效和安全之间的相互关系。同时在数据分析中,TEM作为安全模型可以提供一个数据或事件的数据分析,以及分类的框架,对事件过程中的威胁,胜任力,差错进行分析分类,称为分类法。统一的分类法通过应用TEM模型和胜任力形成一个整体概念,即:在安全端,数据分析使用TEM分类,得出关键的威胁、差错和非期望的航空器状态,以及个人和团队的对策胜任力;在训练端,引入TEM作为训练和评估时观察的框架,飞行员、教员和检查员(I/E)的胜任力作为管理威胁和差错的对策。为进一步实现安全和培训的对接,TEM模型通过“专家映射法”将IATA安全分类的威胁和差错“映射”到相应的EBT训练主题。并通过对数据和事件的风险赋值,得出训练主题的风险值排名,从而建立运行与训练之间的动态联系,使数据分析结果能够直接影响到训练课程开发,实现EBT课程的数据驱动,如下图所示:安全数据从实际运行中来,通过使用TEM分类法、风险赋值和专家映射等工具与方法,可以建立数据与训练主题的动态关联,指导机组更好地管理降低风险。基于数据的有针对性的训练所发展的机组胜任力,可以回到运行中去,作为飞行机组在实际运行中针对威胁和差错的对策。在此整体概念框架下,实现了安全与训练的对话,如下图所示:三、以案为例,进行TEM统一分类分析以及双循环数据模型分析与应用(一)外循环数据分析:基于TEM分类法的威胁与差错识别案例:2月9日,某航A320NEO飞机执行西安-榆林航班,在榆林机场34号跑道ILS进近过程中跑道外接地,导致跑道入口灯和飞机轮胎受损,机上人员安全。经调查,该事件的主要原因是:飞行机组在榆林机场进近过程中,机长在决断高度以下,未正确地辨认着陆跑道的目视参考,低高度未能结合仪表指示控制飞机的下滑轨迹,致使飞机跑道外接地。客观原因是榆林机场跑道视程迅速变化。对“2·9”事件调查报告进行TEM分类法分析,可系统性地解构出关键的威胁、差错和非预期的航空器状态,之后对其中的威胁与差错进行“专家映射”可以得到相应的映射主题。事件中天气现象为轻雾和浅雾,跑道上有浅雾,主导能见度为全天最低,塔台在飞机进近过程中提醒机组“现在地面上有一层浅雾,然后雾移动的比较频繁,RVR变化得非常大,一分钟可能会变化十几次”,体现了TEM分类法中的E-环境威胁中的E01.02低能见度威胁(任何视觉环境降级(DVE)对机组人员表现构成威胁的情况)。体现了胜任力短板为情景意识SAW和问题解决与决策PSD。通过对照威胁和差错映射表,对应的训练主题为低能见度进近。机场和周边部分区域被白雪覆盖,对跑道入口的识别造成一定困难,容易使机组陷入“白洞效应”,并且机长在事后调查中称产生错觉,感觉偏高体现了TEM分类法中的E-环境威胁中的E02缺乏视觉参考威胁(黑暗/黑洞效应。可能导致空间定向失效的环境状况)。体现了胜任力短板为情景意识SWA。通过对照威胁和差错映射表,对应的训练主题为缺乏目视参考。机组未遵循手册要求,在跑道环境未清晰可见的情况下,继续进近直到接地,体现了TEM分类法中的P-程序差错中的P01 SOP 遵从性/交叉检查差错(未能遵守SOP(包括PF/PM分工),违反驾驶舱原则)。体现了胜任力短板为程序应用PRO。通过对照威胁和差错映射表,对应的训练主题为合规性、复飞决策。飞机在决断高度以下,机长注意力分配不当,在低能见条件下,主要精力放在目视寻找跑道,未参考仪表有效判断飞机位置,对于副驾驶的提醒,未能及时修正飞机下滑轨迹。机长依据错误的目视参考(防吹坪),持续稳杆动作体现出TEM分类法中H-飞机操纵差错中的H01人工操纵/飞行控制差错(人工飞行导致垂直,横向或速度偏差)。体现了胜任力短板为情景意识SAW与人工航径管理FPM。通过对照威胁和差错映射表,对应的训练主题为人工航空器控制。机长对于副驾驶提示性喊话回应不全,飞机低于下滑道时副驾驶提醒机长:“低了、低了、低了、低了”机长对于副驾驶的提醒,未能有效形成注意力“突破”,体现出TEM分类法C-交流差错中的C02机组间的交流差错(错误交流,误解或缺乏交流)。体现了胜任力短板为沟通COM与领导力与团队合作LTW,通过对照威胁和差错映射表,对应的训练主题为沟通与领导力。通过以上分析可以直观的得出事件中机组所面临的威胁与差错,胜任力的短板以及对应的训练主题,从而为各类外循环数据分析提供了方法,构建起生产运行通向模拟机训练的桥梁,体现出TEM分类法的外循环数据分析长处:1.数据驱动的精准定位:将复杂事件分解为具体、可训练的威胁、差错和非期望的航空器状态。2.核心风险与主题映射:分析发现核心问题为低能见度、人工操纵、复飞决策和CRM问题,与《EBT数据报告》中高优先级训练主题高度契合,为航空公司EBT课程设计提供依据。3.系统性提升与规避:外循环数据分析不仅识别个别机组问题,通过外循环数据的驱动的课程设计能有效提升机队整体的核心胜任力。(二)内循环数据反馈:课程优化与安全闭环构建基于外循环分析输出的训练需求,利用ADDIE课程设计模型进行课程设计,进入内循环的课程优化与训练效果评估阶段,从在训练中持续对受训人员的核心胜任力进行提高,进而反哺生产运行。1.课程设计(Design):根据“2·9”事件所体现的映射主题,围绕“低能见度进近与复飞决断”,设计复合型训练场景,注入多重威胁(如浅雾、RVR突变、ATC指令变化),设置关键决策点,重点观察学员在PSD、FPM、COM、LTW等胜任力上的表现。2.训练实施与评估(Implement & Evaluate):教员收集学员行为指标数据与操纵参数,通过第一课的模拟机教员评估,确定需要提高的关键胜任力,作为后续课程情景模拟中的目标胜任力,提升学员相应的胜任力。通过对比训练前后数据变化,验证训练效果,形成安全闭环。通过以上方法进行课程优化,形成“分析-训练-反馈”的安全闭环,体现出内循环数据分析的长处:1.训练效果可量化:内循环将训练效果转化为可量化的行为指标数据和QAR数据,使训练投资回报率变得清晰可见。2.持续迭代优化:如果内循环数据发现学员在“复飞决策”上得分仍普遍较低,则反馈至设计环节,增加此场景的训练频次或调整教学方法,实现课程的动态优化。3.促进安全文化:非惩罚性的TEM讲评文化,鼓励飞行员在训练中暴露问题,从而在运行中减少问题,推动了从“事后问责”到“事前预警”的积极安全文化建设。四、结论与展望:基于TEM分类法的EBT双循环模型的核心长处与建议双循环数据驱动模型的应用长处:1.精准性:基于真实运行数据的TEM分析,使训练需求识别从“经验驱动”变为“数据驱动”,使训练目标精确。2.前瞻性:外循环持续监控安全数据,能及时发现潜在风险趋势(如某机场特定进近方式偏差率高),在事件发生前即可开发训练课程,实现主动预警。内循环能及时发现受训人员的关键胜任力短缺,并及时设计情景进行强化升级,前瞻性的预防运行风险。3.系统性:模型将个体技能短板与组织管理漏洞(如排班、重点人员监控)一并纳入分析视野,推动从机组到公司、从训练到运行的系统性安全治理。4.科学性:依托ADDIE模型和TEM框架,训练开发与评估过程标准化、可追溯,避免了训练的随意性和盲目性。5.闭环性:“运行-训练-运行”的内外双循环构成了一个持续改进的学习型系统,确保了安全绩效的不断提升。但在实施中仍需关注以下挑战:1.数据质量与一致性:内循环数据的可靠性高度依赖于教员的标准化和评分一致性。必须严格落实一致性要求,通过ICAP(教员一致性保证方案)和年度复训,确保数据源头准确可靠。2.数据分析能力:课程开发人员须具备强大的数据分析和解读能力,能将海量数据转化为清晰的训练洞察。建议加强课程开发人员在此领域的专项培训。3.SMS系统融合:需打破训练部门与安全管理部门之间的数据壁垒,建立高效的数据共享与分析机制。结论:双循环数据驱动模型不仅是训练技术的革新,更是安全治理模式的深刻变革。它使训练真正成为民航安全链条上主动、智能、可靠的一环,为建设具有中国特色的飞行员技能全生命周期管理体系(PLM)奠定了坚实的数据基石,为民航高质量发展构建起坚固的安全新生态。
-
“TEM”框架下双循环数据驱动EBT训练 长处与应用研究 一、引言随着中国民航运行量持续增长与运行环境复杂化,传统以特情处置和机动操作为核心的“勾选框”式训练模式,难以应对现代航空运行中系统性、复合性风险的挑战。国际民航组织(ICAO)倡导的循证训练(EBT)作为一种以数据为驱动、以胜任力为基础的新型训练范式,其成功实施的关键在于构建了一套内、外双循环数据驱动的动态课程开发与胜任力提升机制。本文以某航“2·9”跑道外接地事件为案例,结合中国民航EBT(循证训练)双循环数据驱动机制与威胁与差错管理(TEM)模型,深入剖析了事件中暴露的机组胜任力短板与系统性风险。研究依托“外循环”识别训练需求,借助“内循环”实现针对性胜任力提升与效果验证,构建了“数据驱动-风险识别-训练映射-安全闭环”的动态治理框架。本文重点论证了EBT双循环模型在提升训练针对性、前瞻性和系统性方面的显著优势,为民航安全实现“以训练防风险、以训练促安全”提供了理论与实践依据。二、EBT双循环模型与TEM理论框架(一)EBT双循环模型架构EBT的双循环数据驱动机制是其核心优势所在:外循环(运行数据→训练需求)通过采集QAR数据、SMS信息报告、事件调查、LOSA审计等行业数据,精准识别当前最高频、最高风险的安全威胁与机组短板,确保训练需求源于真实数据。内循环(训练数据→优化反馈)在模拟机训练中收集学员的胜任力评估数据(基于9大核心胜任力)、教员观察记录和客观飞行参数,用于评估学员的关键胜任力欠缺,并进行针对性情景模拟,确保训练措施的有效性,发现新的风险趋势,为课程迭代提供依据。内外双循环数据通过ADDIE模型分析、设计、开发、实施、评估进行场景研发,利用外循环提供的数据,精准识别风险源而确定训练需求,在民航局已经公布的训练主题基础上有针对性的设计课程,在EBT训练实施过程中,通过第一课的模拟机教员评估,准确确定需要提高的关键胜任力,作为后续课程情景模拟SBT中的目标胜任力,提升学员相应的胜任力,进而反哺航班生产。同时在局方公布的训练主题基础上,胜任力的训练是周期循环的,其后的半年复训,将根据上一个半年复训的训练结果和最新的安全分析结果对“目标胜任力”进行调整,促成受训人员整体核心胜任力的提升。实现“训练向生产要数据,生产向训练要安全”的安全闭环,确保训练课程是一个动态进化、持续改进的有机体。(二)TEM分类法分析模型TEM是一种安全管理的方法,是在(外部因素)和差错(人)危及安全之前,通过飞行员所展现的核心胜任力,形成针对威胁和差错的个人和团队的对策,有助于从运行的角度理解在动态和具有挑战性的运行环境中,人的绩效和安全之间的相互关系。同时在数据分析中,TEM作为安全模型可以提供一个数据或事件的数据分析,以及分类的框架,对事件过程中的威胁,胜任力,差错进行分析分类,称为分类法。统一的分类法通过应用TEM模型和胜任力形成一个整体概念,即:在安全端,数据分析使用TEM分类,得出关键的威胁、差错和非期望的航空器状态,以及个人和团队的对策胜任力;在训练端,引入TEM作为训练和评估时观察的框架,飞行员、教员和检查员(I/E)的胜任力作为管理威胁和差错的对策。为进一步实现安全和培训的对接,TEM模型通过“专家映射法”将IATA安全分类的威胁和差错“映射”到相应的EBT训练主题。并通过对数据和事件的风险赋值,得出训练主题的风险值排名,从而建立运行与训练之间的动态联系,使数据分析结果能够直接影响到训练课程开发,实现EBT课程的数据驱动,如下图所示:安全数据从实际运行中来,通过使用TEM分类法、风险赋值和专家映射等工具与方法,可以建立数据与训练主题的动态关联,指导机组更好地管理降低风险。基于数据的有针对性的训练所发展的机组胜任力,可以回到运行中去,作为飞行机组在实际运行中针对威胁和差错的对策。在此整体概念框架下,实现了安全与训练的对话,如下图所示:三、以案为例,进行TEM统一分类分析以及双循环数据模型分析与应用(一)外循环数据分析:基于TEM分类法的威胁与差错识别案例:2月9日,某航A320NEO飞机执行西安-榆林航班,在榆林机场34号跑道ILS进近过程中跑道外接地,导致跑道入口灯和飞机轮胎受损,机上人员安全。经调查,该事件的主要原因是:飞行机组在榆林机场进近过程中,机长在决断高度以下,未正确地辨认着陆跑道的目视参考,低高度未能结合仪表指示控制飞机的下滑轨迹,致使飞机跑道外接地。客观原因是榆林机场跑道视程迅速变化。对“2·9”事件调查报告进行TEM分类法分析,可系统性地解构出关键的威胁、差错和非预期的航空器状态,之后对其中的威胁与差错进行“专家映射”可以得到相应的映射主题。事件中天气现象为轻雾和浅雾,跑道上有浅雾,主导能见度为全天最低,塔台在飞机进近过程中提醒机组“现在地面上有一层浅雾,然后雾移动的比较频繁,RVR变化得非常大,一分钟可能会变化十几次”,体现了TEM分类法中的E-环境威胁中的E01.02低能见度威胁(任何视觉环境降级(DVE)对机组人员表现构成威胁的情况)。体现了胜任力短板为情景意识SAW和问题解决与决策PSD。通过对照威胁和差错映射表,对应的训练主题为低能见度进近。机场和周边部分区域被白雪覆盖,对跑道入口的识别造成一定困难,容易使机组陷入“白洞效应”,并且机长在事后调查中称产生错觉,感觉偏高体现了TEM分类法中的E-环境威胁中的E02缺乏视觉参考威胁(黑暗/黑洞效应。可能导致空间定向失效的环境状况)。体现了胜任力短板为情景意识SWA。通过对照威胁和差错映射表,对应的训练主题为缺乏目视参考。机组未遵循手册要求,在跑道环境未清晰可见的情况下,继续进近直到接地,体现了TEM分类法中的P-程序差错中的P01 SOP 遵从性/交叉检查差错(未能遵守SOP(包括PF/PM分工),违反驾驶舱原则)。体现了胜任力短板为程序应用PRO。通过对照威胁和差错映射表,对应的训练主题为合规性、复飞决策。飞机在决断高度以下,机长注意力分配不当,在低能见条件下,主要精力放在目视寻找跑道,未参考仪表有效判断飞机位置,对于副驾驶的提醒,未能及时修正飞机下滑轨迹。机长依据错误的目视参考(防吹坪),持续稳杆动作体现出TEM分类法中H-飞机操纵差错中的H01人工操纵/飞行控制差错(人工飞行导致垂直,横向或速度偏差)。体现了胜任力短板为情景意识SAW与人工航径管理FPM。通过对照威胁和差错映射表,对应的训练主题为人工航空器控制。机长对于副驾驶提示性喊话回应不全,飞机低于下滑道时副驾驶提醒机长:“低了、低了、低了、低了”机长对于副驾驶的提醒,未能有效形成注意力“突破”,体现出TEM分类法C-交流差错中的C02机组间的交流差错(错误交流,误解或缺乏交流)。体现了胜任力短板为沟通COM与领导力与团队合作LTW,通过对照威胁和差错映射表,对应的训练主题为沟通与领导力。“2·9”事件TEM分析与训练需求映射通过以上分析可以直观的得出事件中机组所面临的威胁与差错,胜任力的短板以及对应的训练主题,从而为各类外循环数据分析提供了方法,构建起生产运行通向模拟机训练的桥梁,体现出TEM分类法的外循环数据分析长处:1.数据驱动的精准定位:将复杂事件分解为具体、可训练的威胁、差错和非期望的航空器状态。2.核心风险与主题映射:分析发现核心问题为低能见度、人工操纵、复飞决策和CRM问题,与《EBT数据报告》中高优先级训练主题高度契合,为航空公司EBT课程设计提供依据。3.系统性提升与规避:外循环数据分析不仅识别个别机组问题,通过外循环数据的驱动的课程设计能有效提升机队整体的核心胜任力。(二)内循环数据反馈:课程优化与安全闭环构建基于外循环分析输出的训练需求,利用ADDIE课程设计模型进行课程设计,进入内循环的课程优化与训练效果评估阶段,从在训练中持续对受训人员的核心胜任力进行提高,进而反哺生产运行。1.课程设计(Design):根据“2·9”事件所体现的映射主题,围绕“低能见度进近与复飞决断”,设计复合型训练场景,注入多重威胁(如浅雾、RVR突变、ATC指令变化),设置关键决策点,重点观察学员在PSD、FPM、COM、LTW等胜任力上的表现。2.训练实施与评估(Implement & Evaluate):教员收集学员行为指标数据与操纵参数,通过第一课的模拟机教员评估,确定需要提高的关键胜任力,作为后续课程情景模拟中的目标胜任力,提升学员相应的胜任力。通过对比训练前后数据变化,验证训练效果,形成安全闭环。通过以上方法进行课程优化,形成“分析-训练-反馈”的安全闭环,体现出内循环数据分析的长处:1.训练效果可量化:内循环将训练效果转化为可量化的行为指标数据和QAR数据,使训练投资回报率变得清晰可见。2.持续迭代优化:如果内循环数据发现学员在“复飞决策”上得分仍普遍较低,则反馈至设计环节,增加此场景的训练频次或调整教学方法,实现课程的动态优化。3.促进安全文化:非惩罚性的TEM讲评文化,鼓励飞行员在训练中暴露问题,从而在运行中减少问题,推动了从“事后问责”到“事前预警”的积极安全文化建设。四、结论与展望:基于TEM分类法的EBT双循环模型的核心长处与建议双循环数据驱动模型的应用长处:1.精准性:基于真实运行数据的TEM分析,使训练需求识别从“经验驱动”变为“数据驱动”,使训练目标精确。2.前瞻性:外循环持续监控安全数据,能及时发现潜在风险趋势(如某机场特定进近方式偏差率高),在事件发生前即可开发训练课程,实现主动预警。内循环能及时发现受训人员的关键胜任力短缺,并及时设计情景进行强化升级,前瞻性的预防运行风险。3.系统性:模型将个体技能短板与组织管理漏洞(如排班、重点人员监控)一并纳入分析视野,推动从机组到公司、从训练到运行的系统性安全治理。4.科学性:依托ADDIE模型和TEM框架,训练开发与评估过程标准化、可追溯,避免了训练的随意性和盲目性。5.闭环性:“运行-训练-运行”的内外双循环构成了一个持续改进的学习型系统,确保了安全绩效的不断提升。但在实施中仍需关注以下挑战:1.数据质量与一致性:内循环数据的可靠性高度依赖于教员的标准化和评分一致性。必须严格落实一致性要求,通过ICAP(教员一致性保证方案)和年度复训,确保数据源头准确可靠。2.数据分析能力:课程开发人员须具备强大的数据分析和解读能力,能将海量数据转化为清晰的训练洞察。建议加强课程开发人员在此领域的专项培训。3.SMS系统融合:需打破训练部门与安全管理部门之间的数据壁垒,建立高效的数据共享与分析机制。结论:双循环数据驱动模型不仅是训练技术的革新,更是安全治理模式的深刻变革。它使训练真正成为民航安全链条上主动、智能、可靠的一环,为建设具有中国特色的飞行员技能全生命周期管理体系(PLM)奠定了坚实的数据基石,为民航高质量发展构建起坚固的安全新生态。SPOT供稿安监部:杨钧
-
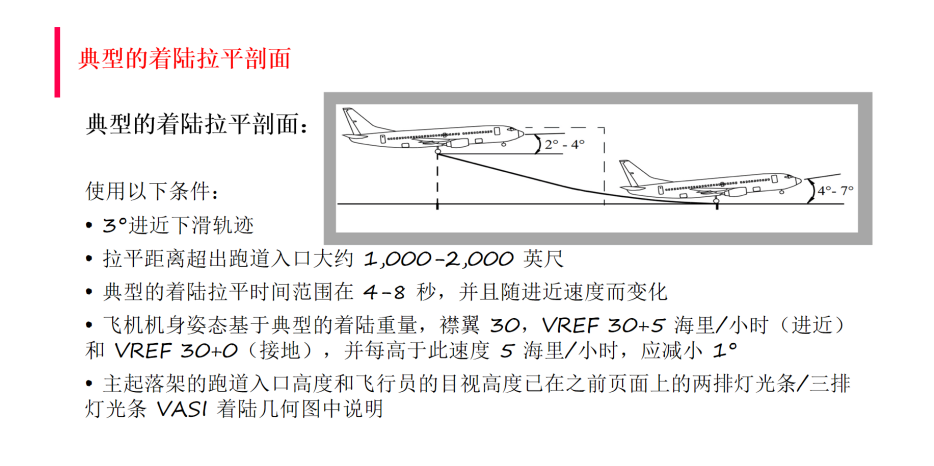
关于训练中着陆技能的一点思考 作者:飞行部二大队耿跃一、关于训练的理解在飞行训练中,必须遵循教育和训练规律。飞行技术训练的教学有别于常规的知识教育,突出特点在于技能传授,训练的过程往往受训练时间有限,训练任务多面等限制,因此,作为飞行教员要同时处理训练的时效性和全面性,所以不但要懂教育学、心理学知识,还要熟练运用示范、提示和放手等特殊的教学方法。教员的基本能力还在于善于从蛛丝马迹中发现学员的飞行细节问题并分析原因,通过有效的教学手段纠正错误。对飞行教员来说,不但要训练飞行技术,还要重点培训其教学传授能力。抓教学,就是要抓教学方法研究与交流。既要重视技术成长,还要重视如何教、如何学的问题。不少飞行不安全事件是操纵者常规技术不熟练导致的。常规技术并不神秘,主要体现在基本驾驶操纵上。部分事件中,有的机组在转为人工操纵后,修正偏差的能力不强,往往控制不住飞机惯性,发生飞机偏出、冲出跑道甚至擦发动机、擦机尾等严重不安全事件。因此,公司为深刻吸取行业和公司严重不安全事件教训 ,系统防范核心风险 ,切实保障飞行安全,识别飞行岗位“技术五防”、“非技术五防”风险 ,坚持安全隐患“零容忍” ,坚持人为责任原因不安全事件“零容忍” ,构建飞行岗位核心胜任力“ 5 +5”风险管理体系。以下内容为个人的一点见解,从正常训练,标准操作,能量管理,气象条件等方面分析,如有不合理的地方请各位同事批评指正。二、关于着陆载荷大的分析,我们训练的导向。训练中想要解决问题,我们就先要找出问题,以下分析对于近两年着陆载荷大事件的统计分析,通过结果可以看到,大部分事件还是存在共性问题,主要有以下几个方面:1、飞机势能(垂直速度)对接地载荷的影响,垂直速度越大意味着高度减小的越快,表现为下降率大。飞机进跑道后在短时间内接地,接地时垂直速度(下降率)从较大值快速减小到 0,飞机受到地面的反作用力较大,垂直载荷会显著增大。2、飞机动能(水平速度)对接地载荷的影响,接地时油门未收光,飞机推力在垂直方向的分量会增大垂直载荷。3、机组抽杆对接地载荷的影响,机组短时间内带杆量输入较大,会造成飞机姿态的快速增大,升力作用在翼根部,导致垂直载荷增大;由于力矩的原因,在飞机接地过程中抽杆会加快主轮接地,相当于增大接地下降率,也会导致垂直载荷增大。4、入口条件的影响(1)入口状态存在偏差① 速度小或油门小,飞机动能不足,正常拉开始后飞机下沉偏快。② 速度大或油门大,收油门修正后带出姿态晚。③ 出姿态早,飞机不下沉,过早收光油门或稳杆修正。④ 姿态小,正常拉开始未能带出着陆姿态。(2)入口状态正常① 拉开始时机偏晚,接地前带杆量大。② 正常拉开始,带杆量不足。③ 拉开始后,有稳杆动作。④ 收油门时机晚或动作慢,飞机大速度接地。5、接地前/时抽杆、带油门接地导致飞机跳起,跳着陆处置不当:(1)跳起后松杆,二次接地时飞机姿态减小。(2)跳起后推拉杆,飞机姿态变化较大,二次接地时有抽杆动作。(3)飞机跳起后油门收到慢车,减速板伸出,导致二次接地重。6、外界气象条件的影响,大风乱流,低能见等天气。三、训练中的基本理念结合以上的事件分析可以看到,要保证训练质量,我们需要明确以下几个理念:1、飞机的能量的理解,飞机能量是速度,姿态,油门的匹配,单一数据不能体现,仅盯速度不看姿态,会导致俯仰的变化,甚至会制造新的偏差。(1)允许速度在合理范围内变化——稳定气流条件下,以 5KTS 左右的变化量设定范围。只要速度没超过此范围,不用动油门或微调油门,以保持状态稳定。飞机必须以进近速度飞行,如果空速接近进近速度,则可接受+10 节至-5 节偏差,特别注意训练手册强调的是接近进近速度时,即趋向正常速度。(2)加油门果断,收油门谨慎。参考自动油门的设计,在空速下降到指令速度以下时会快速调整推力,超过指令速度时,会缓慢减小推力。当速度低到安全范围底线甚至超出时,为了制止速度的下跌以及增速到安全范围以内,就需要大的油门变化量。除非你及时发现并判断出减速苗头,增加油门就可柔和一些,俗称“补油门”。当速度过大时,由于推力产生的变化相较于油门杆移动是有滞后的,所以应试探着柔和多次少量地减小油门,有乱流时,风的变化也是快速且无序的,防止气流突然改变导致速度减少过快而来不及补上足够的油门(3)加强杆与油门的配合,补油门同时要有意识向前适当增加稳杆量;收油门同时要有意识向后适当增加带杆量;杆量以保持所选下降率 为准。有时由于油门变化量小,升降率的变化不会很明显地立即显现。2、拉平过程是良好入口条件的延续,也是入口条件轻微偏差的修正和调整。拉平过程是在油门杆和驾驶杆配合下,飞机状态按照预定的轨迹完成着陆的一个过程,一个良好的着陆过程飞机始终维持一个动态平衡,在油门杆与驾驶杆的“柔和一致”中接地。(1)拉平过程中油门的使用①在同样状态下,入口速度大,代表此时飞机气动性能偏强,容易造成接地速度大导致接地姿态小,也容易造成拉高拉飘等状况。为了避免气动性能强的影响应该早点收油门或收油门时机不变,但速率比正常快一点,或根据实际情况两者相结合,从而消除入口速度大对着陆造成的影响。②那入口条件在正常,但是入口油门小(有明显的减速趋势),如果还以正常的时机和速率收油门就会造成飞机下沉快。则需要比正常的时机晚收一点或速率慢一些,或两者相结合。如果小的过多可能还要补一些油门。从这两个例子可以看出我们要做的就是“让多的少,让大的小,让不足的足,让不够的够”,最终达到平衡的目的,这些都可以通过公司常说的“四控制、一使用、一分配”实现。(2)拉平过程中驾驶杆的使用①飞机的飞行是靠在一定速度下,利用气动性能,使用各个舵面来控制飞机轨迹。在入口以后到接地前,杆是控制下沉最直接,最有效的方法。还要理解杆的延时性。根据升力公式,可以影响升力的是速度和升力系数,升力系数跟仰角有关。杆是通过作动升降舵实现升力的改变。初期带杆升降舵角度改变,在机位处形成向下的压力,压低机尾,根据杠杆原理,抬升了机头,增大仰角,在这个过程中初期飞机的下降率是瞬间增大的,直到增大的仰角带来了升力的变化飞机才会感受到整体升力,减小飞机的下沉。所以,拉开始过晚,带杆还没有改善升力时飞机接地了,不仅会造成接地载荷大,还会造成接地后仰角持续增大或飞机跳起。②理解飞机的低头力矩,737飞机是下单翼飞机,油门的增减会带来抬头和低头力矩,在着陆拉平过程中应该是根据飞机状态持续收油门的过程,这样通过杆量控制可以增加容错率。如果保持油门直到10英尺将油门一把收光,这个过程会形成低头力矩,所以此时带杆不仅需要改善升力还需要抵消形成的低头力矩,相当于同时处理两个问题,否则就会掉机头,这也是很多时候感觉自己带杆了但没能有效制止下沉的原因。四、基于手册的标准手法熟练掌握基于手册的落地手法是提升技能最根本的依靠“当跑道头从机头下越过并消失后,将视线转移到跑道的远端。转移视线有助于在拉平时控制俯仰姿态。保持恒定的空速和下降率有助于确定拉平点。当主轮在跑道上方大约20 英尺时,增加大约2-3° 的俯仰姿态开始拉平。这可以减小下降率。拉平开始后,柔和地把油门收到慢车,略微调整俯仰姿态以保持所需的下降率直到接地。理想的情况是油门杆收到慢车的同时主轮接地。柔和地把油门收到慢车也有助于控制因收油门而产生的机头自然下俯。保持足够的带杆力以保持俯仰姿态不变。接地姿态根据Vref不同而有所变化。理想情况下,油门杆收到慢车位的同时主轮接地。”在基于手册的落地方法中,把大家关心的问题也进行了总结:(1)视线转移的方法﹡转移视线的时机:当跑道入口从机头下方越过并消失时。﹡转移视线至何处:跑道尽头。﹡转移视线的目的:有助于在拉平时控制俯仰姿态。﹡保持恒定的空速和下降率:有助于确定拉平点。(2)油门的控制方法﹡收油门的时机: 在主起落架距跑道大约20英尺时,增加俯仰姿态2°-3°后,开始柔和收油门杆到慢车。﹡收油门至慢车的同时:小量修正俯仰姿态,以保持所需的下降率直到接地。保持足够的带杆力以保证俯仰姿态稳定。﹡拉开始和收油门的先后顺序:先拉开始,后收油门。﹡收油门的速率和量:柔和收油门杆到慢车,最好在主起落架接地的同时将油门杆收到慢车。(3)拉平的操作方法﹡拉平的时机:当主起落架距跑道大约20英尺时。﹡拉平的姿态变化:增加俯仰姿态约 2°-3°。(4)驾驶杆的使用方法﹡驾驶杆的改变量:拉平时避免过快的移动、避免拉平时使用配平、避免平飘;着陆后避免增加俯仰姿态,配平,或使前轮离开跑道,这可能会导致擦机尾。﹡拉平的结果:以所需的空速,保持所需的下降率在准确的接地点将飞机“飞”到跑道上。﹡着陆后不要增加俯仰姿态,配平,或使前轮离开跑道。这可能会导致擦机尾。五、典型案例分析本次案例是一起前置超限事件,但是可以从中看到部分地方与标准操手册不符的地方。50尺到15尺平飘距离略低于机队,可以看到10英尺时有一个明显的下降率变化,随后高于剖面。20英尺前下沉基本正常,20-10英尺下降率减小较快,10英尺以后下降率有增加。在应该拉开始的阶段,下降率反而增加了,直到最后5英尺,控制住下沉。空速一直低于机队平均值,而俯仰配平小于机队平均值。速度小,入口条件创造不好,后续修正也不及时。仰角在35-10英尺后快速增加,10英尺之后略有减小;驾驶杆使用在30英尺前偏大,之后偏小。结合驾驶杆的使用和仰角变化来看,机组修正乱流,影响后续拉平动作N1值整体高于机队平均值;油门杆使用也高于机队平均值,10英尺后油门处于慢车位置。油们位置处于偏大状态,但是速度偏小。天气信息:METAR ZGSZ 071500Z 12005MPS 9999 SCT026 26/23 Q1009 NOSIG=TAF ZGSZ 071508Z 0718/0824 12004MPS 8000 BKN030 TX30/0806Z TN24/0722Z TN25/0822Z BECMG 0803/0804 18004MPS=METAR ZGSZ 071530Z 12006MPS 9999 SCT026 26/23 Q1009 NOSIG=METAR ZGSZ 071600Z 12005MPS 9999 SCT033 26/23 Q1008 NOSIG=METAR ZGSZ 071630Z 12006MPS 9999 SCT033 26/23 Q1008 NOSIG=译码分析:飞机着陆重量65.1吨(143520磅),使用16号跑道落地,五边风向在126°到90°变化,风速从12节到7节之间变化,Vref30=148kt,选择空速153节,风增量+5。决断高到50英尺:下降率基本处于-704ft/min到-816ft/min之间,空速处于153节到158节之间,仰角处于1.406°-2.988°之间,状态较为稳定。飞机入口:下降率-768ft/min。入口仰角2.109度。入口空速153节,入口N1值61。入口条件正常。50英尺到11英尺:仰角由2.109°逐渐增加到4.043°,下降率由-768ft/min逐渐减小到-208ft/min,40-30英尺出姿态,机组在21英尺开始收油门,最大俯仰4.403°出现在21-11英尺高度。11英尺到接地:8英尺油门杆收至慢车,仰角由4.043°减小到2.109°,下降率由-208ft/min增加到-272ft/min,机组带杆量由2.77增加至5.05。空速由152.75节减小到145节。接地载荷1.389,此时减速板升起,有载荷叠加,最终产生载荷1.631G。原因分析:环境因素:五边基本处于侧顶风,风速逐渐减小,飞机能量趋势是一个减弱的过程,并且一直持续到接地,由12节减小到7节,空速基本维持在目标空速到目标空速+5节左右,状态保持较好.机组操纵:机组整体的短五边状态保持和拉开始时机都很正常,但是由于增加仰角过多,导致飞机在11英尺达到-208FT/MIN,于是机组将油门收至慢车。机组没能保持足够的带杆量,没有维持足够的接地仰角,飞机重量65.1吨,比较重,油门收光之后低头力矩的影响叠加顶风减小导致下沉在接地的同时增加,虽然机组持续带杆,但控制下沉效果不足,所有减速板伸出下压瞬时叠加下降率导致接地载荷大。六、训练和教学方法1、训练应该是循序渐进的过程在训练中,教员应该根据学员所处阶段不同,教员可以将训练教学分为三个阶段。认知阶段主要是从看别人做到想动手,再到跟着做,教员需要进行演示、讲解、指导。练习阶段是从跟着做到按部就班地做,再到轻松、灵活地做。教员需要在模拟机训练场景中不断强化学员的练习、试错,并接受学员犯错,给予学员更多练习的机会。自动化反应阶段是从轻松灵活地做到变通地做,再到创造性地做。教员可通过变换条件,增加操纵的复杂度和挑战性。2、如何让做到提高训练质量(1)教学和讲评过程中一定要以基于手册的落地手法作为指导依据,不能掺杂个人习惯,树立标准操作意识。(2)教学要讲究因人而异。成长是循序渐进的过程,不能拔苗助长,训练中应该利用公司现有的数据平台的统计和分析,比如:Froms平台,充分把这个平台的分析结果结合训练中,哪里有问题,就针对性的练,个性化定制,才能补足短板。(3)正确的点线面印象,五边的不外乎这几个方面,训练中,教员做好标准示范,并且纠正学员的错误印象,让学员形成一种不在标准的轨迹就别扭的反应,这是一个时间积累的过程。(4)稳定进近意识。创造良好的入口条件,注意飞机能量的控制,做到油门,姿态,速度的匹配,除此之外还要做好有轻微偏差时的修正能力,气象条件的变化必然导致飞机状态的变化,所以学员应该具备一定的偏差修正能力,但是也不能盲目盲干。落地后及时复盘,冰冻三尺非一日之寒,复盘总结才是进步的重要方法,线自己分析,在教员讲评,从发现问题,描述问题,分析问题,消除问题。这样每天前进一小步,日积月累,才会实现质的提高。