搜索到
126
篇与
的结果
-
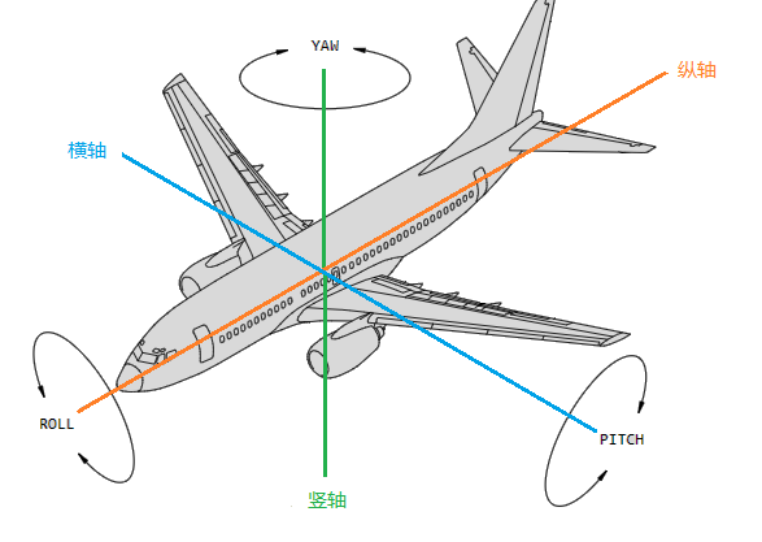
 浅谈偏航阻尼器的功用及空中失效处置 作者:培训部飞行培训中心 孙鹏一、引言荷兰滚(Dutch Roll)是一种危险的飞行状态,它不仅严重影响到飞行员的操纵控制,而且会损伤飞机结构,甚至导致事故的出现。机组必须提高警惕、防止其发生。本文将简要介绍荷兰滚产生原理、偏航阻尼器(YAW DAMPER)的工作原理及使用方法并结合案例分析飞行员如何应对偏航阻尼器失效带来的风险。二、概念解释(一)稳定性 民航客机是具有稳定性的,该稳定性是指飞机处于平稳飞行状态时受到突发的外界干扰条件(比如强烈的侧风、阵风、推力不对称等),造成飞机偏离了之前的平衡状态。而当干扰消失后,飞机又能够恢复到(或接近)原飞行状态的一种特性。如图1所示,飞机被设计为能够在3个轴向上运动以满足不同的飞行姿态控制:调整机翼升力大小可以完成绕纵轴的横滚操纵(转弯);操纵水平尾翼来完成绕横轴的俯仰动作(上升、下降);控制方向舵偏转可以使飞机绕竖轴完成偏航操纵(航向控制)。对应这3个轴向运动便可以将飞机的稳定性分解为三个轴向上的,即横侧稳定性、俯仰稳定性和方向稳定性,这三个维度的稳定性共同保障飞机在飞行过程中的安全。(二)荷兰滚荷兰滚是一个表示飞行状态的术语,现象为飞机在方向上沿S形前进、同时机身左右飘摆形成一种非指令性的复合震荡运动(图2),并且飞机的这种状态会按规律的节奏持续下去。因为此时飞机的运动状态与滑冰动作很相似,恰好滑冰运动是荷兰民众在冬季喜爱的项目,所以得名荷兰滚。通过图3的举例解析能够得证荷兰滚是飞机偏航和滚转的复合、循环运动:机头左偏时,飞机向左滚转;机头右偏,飞机向右滚转。“保持S形前进”是方向稳定性的作用结果、“左右飘摆”是横侧稳定性的作用结果,遇到外界干扰时,飞机的横侧稳定性和方向稳定性都开始发挥作用,交替作用时两者相互干扰就容易激发复合振荡。1947年,波音第一架安装后掠翼的轰炸机XB-47首飞,飞机未达到最大速度时突现S形的摆动,使飞行员难以操控。工程师分析证实,由于飞机安装后掠翼使横侧稳定性增大导致出现摆动状况,随后在航向控制系统安装偏航阻尼器并成功抑制了飞机不稳定的运动。这次事件使人们意识到后掠翼翼型虽然有延缓激波、提高速度的优势,但是因为增加横侧稳定性使飞机更容易发生荷兰滚。如同图3的运动解析,当横侧稳定性强于方向稳定性时,偏航引起飞机自主的横滚动作,导致飞机进入姿态修正的往复循环中,这便是导致荷兰滚产生的根本原因。现代民航客机普遍采用后掠翼型、带有上反角的组合设计形式,这种翼型同样会增强飞机的横侧稳定性,给方向舵系统安装偏航阻尼器平衡横侧稳定性和方向稳定性两者的强度便成为了当下抑制荷兰滚的标准配置。三、偏航阻尼器(一)工作原理介绍偏航阻尼器不仅仅是单一的部件,更准确的名称应该是偏航阻尼器系统,这是一个自动控制的飞行系统,由失速管理/偏航阻尼器(SMYD)、偏航阻尼器衔接电门、偏航阻尼器断开灯、偏航阻尼器指示器、方向舵PCU上的控制部件等组成。偏航阻尼器是典型的自动闭环控制系统,如果飞行中遇到外界干扰造成的飞机偏航时,偏航阻尼器会给出与飞机的偏航力矩成比例并与其反向的方向舵运动指令以使飞机沿竖轴保持稳定,即增加偏航阻尼。偏航阻尼器分为主和备用偏航阻尼器,均由SMYD控制。飞机上的两个SMYD使用来自大气数据惯性基准组件(ADIRU)的数据、来自飞机传感器的其它数据(例如FMC提供飞机的总重)、驾驶盘偏转信号来计算需要的偏航阻尼值,见图4所示。在正常工作期间,SMYD 1控制主偏航阻尼,此时系统要求两个SMYD都必须是可用的,因为SMYD 1在发出方向舵移动指令之前要与SMYD 2比较其偏航阻尼的计算,主偏航阻尼器使用主方向舵PCU来移动方向舵以减小偏航;非正常工作期间,即人工恢复飞行时(A和 B液压系统压力均失效),SMYD 2指令备用方向舵PCU移动方向舵用于备用偏航阻尼。(二)使用方法与偏航阻尼器工作相关的电门/指示灯共有3个,安装在飞行操纵面板上,见图5。 ①飞行操纵电门(FLT CONTROL)通常设置在A ON和B ON位。若任一电门放置在STBY RUD位则使用备用液压系统泵并打开备用方向舵关断活门,给备用方向舵动力控制组件供压。②偏航阻尼器电门在ON位可以接通偏航阻尼器。如果飞行操纵电门B在ON位,主偏航阻尼器与主方向舵动力控制组件接通;如果飞行操纵电门A和B都在备用方向舵(STBY RUD)位,备用偏航阻尼器与备用方向舵动力控制组件接通。③偏航阻尼器琥珀色灯亮表示偏航阻尼器未接通。综上可知,主偏航阻尼器、备用偏航阻尼器工作需要不同的液压控制,详见附表。需要注意的是,当A液压系统正常而B液压失效时,保持飞行操纵电门ON位是无法接通偏航阻尼器的,因为飞机设计者认为飞行员仍可以利用A液压操纵方向舵控制飞机的偏航。若此时飞行操纵A、B电门均放置在STBY RUD位会切断供给副翼和升降舵作动的液压压力,这对飞行员的操纵影响更大,得不偿失。只有在A、B液压都失效时,副翼和升降舵的操纵失去了液压助力,这时将飞行操纵A、B电门放置在STBY RUD位,飞行员可以借助备用液压操纵方向舵和接通备用偏航阻尼器。所以,B737机型的《快速检查单》中只在执行人工恢复或A、B系统均失效检查单(图6)程序时才需要接通备用偏航阻尼器,辅助飞行员控制飞行的姿态。四、案例分析(一)2024年12月,某航一架B737-800飞机执行济南-舟山航班时,在起飞爬升过程中偏航阻尼器断开、琥珀色指示灯亮。机组执行《快速检查单》处置程序确认偏航阻尼器无法接通,机组考虑到后续航段均有中度颠簸区,联系运行控制中心综合评估后决策备降南京并安全着陆。维修人员排故判断为1号SMYD、右侧ADIRU故障。偏航阻尼器检查单程序要求机组确认偏航阻尼器无法接通后需要避开中度及以上颠簸区飞行,如图7。而后续航路恰好有颠簸区域,存在飞机进入荷兰滚的风险,这是机组面临的威胁。机组对威胁进行了有效管理,做出备降的决策是恰当合理的,保证了运行的安全。(二)2024年5月,美国西南航空公司一架B737MAX客机从菲尼克斯飞往奥克兰,在32000英尺高度时发生荷兰滚,所幸机组成功控制住了飞机,最终安全降落。经调查,事件原因为偏航阻尼器工作异常导致的飞机进入荷兰滚。航后检查发现备用方向舵动力控制组件受损,飞机尾部受到严重的结构性损坏。机组在发生荷兰滚时能够重新控制住飞机状态展现了优秀的操纵能力,采用合适的控制方法来应对荷兰滚尤为重要。改出荷兰滚的要领总结如下:①首先要理解发生荷兰滚的原理,辨明飞机当前状态是否进入荷兰滚。②确认偏航阻尼器工作状态,及时人工干预飞机姿态和制定应对计划。避免飞机进入颠簸区域及上升高度,否则将导致飞机状态进一步失控。③如果飞机已经进入荷兰滚,要明确改出的方法是施加与偏航方向相反的方向舵控制,通过补偿偏航阻尼来抑制自发的偏航运动。切勿因飞机有坡度而下意识压盘改平机翼,横滚运动会产生逆向偏航效应进一步激励偏航运动,使荷兰滚加剧。④改出时观察机头移动方向,反向蹬舵阻止机头移动,蹬舵动作要柔和,观察有效再继续提供舵力直到消除偏航运动。总而言之,飞行员改出荷兰滚是一个精准、柔和的操作过程,切勿粗猛蛮干。偏航运动被抑制后,可以按需压盘改平飞机姿态。 五、总结偏航阻尼器的精准控制使民航客机飞行时进入荷兰滚的情况很罕见,但是偏航阻尼器系统可能会失效或发生故障,这将给后续飞行带来风险。机组应严格执行检查单要求操作,避开颠簸区域、按需降低高度,结合飞机状态及天气情况做出合理的决策。飞行员还应掌握荷兰滚产生的理论原因和必要的处置技术以应对偏航阻尼器失效引发的异常情况。由点及面,任何飞机的系统、设备都有发生故障的可能,此时考验的就是飞行员的胜任力,飞行员对其工作原理和失效处置程序的熟练掌握,是保证安全飞行的重要一环。飞行员实力的积累是信心的基石,以实力为根基,以信心为引擎,方能行稳致远。
浅谈偏航阻尼器的功用及空中失效处置 作者:培训部飞行培训中心 孙鹏一、引言荷兰滚(Dutch Roll)是一种危险的飞行状态,它不仅严重影响到飞行员的操纵控制,而且会损伤飞机结构,甚至导致事故的出现。机组必须提高警惕、防止其发生。本文将简要介绍荷兰滚产生原理、偏航阻尼器(YAW DAMPER)的工作原理及使用方法并结合案例分析飞行员如何应对偏航阻尼器失效带来的风险。二、概念解释(一)稳定性 民航客机是具有稳定性的,该稳定性是指飞机处于平稳飞行状态时受到突发的外界干扰条件(比如强烈的侧风、阵风、推力不对称等),造成飞机偏离了之前的平衡状态。而当干扰消失后,飞机又能够恢复到(或接近)原飞行状态的一种特性。如图1所示,飞机被设计为能够在3个轴向上运动以满足不同的飞行姿态控制:调整机翼升力大小可以完成绕纵轴的横滚操纵(转弯);操纵水平尾翼来完成绕横轴的俯仰动作(上升、下降);控制方向舵偏转可以使飞机绕竖轴完成偏航操纵(航向控制)。对应这3个轴向运动便可以将飞机的稳定性分解为三个轴向上的,即横侧稳定性、俯仰稳定性和方向稳定性,这三个维度的稳定性共同保障飞机在飞行过程中的安全。(二)荷兰滚荷兰滚是一个表示飞行状态的术语,现象为飞机在方向上沿S形前进、同时机身左右飘摆形成一种非指令性的复合震荡运动(图2),并且飞机的这种状态会按规律的节奏持续下去。因为此时飞机的运动状态与滑冰动作很相似,恰好滑冰运动是荷兰民众在冬季喜爱的项目,所以得名荷兰滚。通过图3的举例解析能够得证荷兰滚是飞机偏航和滚转的复合、循环运动:机头左偏时,飞机向左滚转;机头右偏,飞机向右滚转。“保持S形前进”是方向稳定性的作用结果、“左右飘摆”是横侧稳定性的作用结果,遇到外界干扰时,飞机的横侧稳定性和方向稳定性都开始发挥作用,交替作用时两者相互干扰就容易激发复合振荡。1947年,波音第一架安装后掠翼的轰炸机XB-47首飞,飞机未达到最大速度时突现S形的摆动,使飞行员难以操控。工程师分析证实,由于飞机安装后掠翼使横侧稳定性增大导致出现摆动状况,随后在航向控制系统安装偏航阻尼器并成功抑制了飞机不稳定的运动。这次事件使人们意识到后掠翼翼型虽然有延缓激波、提高速度的优势,但是因为增加横侧稳定性使飞机更容易发生荷兰滚。如同图3的运动解析,当横侧稳定性强于方向稳定性时,偏航引起飞机自主的横滚动作,导致飞机进入姿态修正的往复循环中,这便是导致荷兰滚产生的根本原因。现代民航客机普遍采用后掠翼型、带有上反角的组合设计形式,这种翼型同样会增强飞机的横侧稳定性,给方向舵系统安装偏航阻尼器平衡横侧稳定性和方向稳定性两者的强度便成为了当下抑制荷兰滚的标准配置。三、偏航阻尼器(一)工作原理介绍偏航阻尼器不仅仅是单一的部件,更准确的名称应该是偏航阻尼器系统,这是一个自动控制的飞行系统,由失速管理/偏航阻尼器(SMYD)、偏航阻尼器衔接电门、偏航阻尼器断开灯、偏航阻尼器指示器、方向舵PCU上的控制部件等组成。偏航阻尼器是典型的自动闭环控制系统,如果飞行中遇到外界干扰造成的飞机偏航时,偏航阻尼器会给出与飞机的偏航力矩成比例并与其反向的方向舵运动指令以使飞机沿竖轴保持稳定,即增加偏航阻尼。偏航阻尼器分为主和备用偏航阻尼器,均由SMYD控制。飞机上的两个SMYD使用来自大气数据惯性基准组件(ADIRU)的数据、来自飞机传感器的其它数据(例如FMC提供飞机的总重)、驾驶盘偏转信号来计算需要的偏航阻尼值,见图4所示。在正常工作期间,SMYD 1控制主偏航阻尼,此时系统要求两个SMYD都必须是可用的,因为SMYD 1在发出方向舵移动指令之前要与SMYD 2比较其偏航阻尼的计算,主偏航阻尼器使用主方向舵PCU来移动方向舵以减小偏航;非正常工作期间,即人工恢复飞行时(A和 B液压系统压力均失效),SMYD 2指令备用方向舵PCU移动方向舵用于备用偏航阻尼。(二)使用方法与偏航阻尼器工作相关的电门/指示灯共有3个,安装在飞行操纵面板上,见图5。 ①飞行操纵电门(FLT CONTROL)通常设置在A ON和B ON位。若任一电门放置在STBY RUD位则使用备用液压系统泵并打开备用方向舵关断活门,给备用方向舵动力控制组件供压。②偏航阻尼器电门在ON位可以接通偏航阻尼器。如果飞行操纵电门B在ON位,主偏航阻尼器与主方向舵动力控制组件接通;如果飞行操纵电门A和B都在备用方向舵(STBY RUD)位,备用偏航阻尼器与备用方向舵动力控制组件接通。③偏航阻尼器琥珀色灯亮表示偏航阻尼器未接通。综上可知,主偏航阻尼器、备用偏航阻尼器工作需要不同的液压控制,详见附表。需要注意的是,当A液压系统正常而B液压失效时,保持飞行操纵电门ON位是无法接通偏航阻尼器的,因为飞机设计者认为飞行员仍可以利用A液压操纵方向舵控制飞机的偏航。若此时飞行操纵A、B电门均放置在STBY RUD位会切断供给副翼和升降舵作动的液压压力,这对飞行员的操纵影响更大,得不偿失。只有在A、B液压都失效时,副翼和升降舵的操纵失去了液压助力,这时将飞行操纵A、B电门放置在STBY RUD位,飞行员可以借助备用液压操纵方向舵和接通备用偏航阻尼器。所以,B737机型的《快速检查单》中只在执行人工恢复或A、B系统均失效检查单(图6)程序时才需要接通备用偏航阻尼器,辅助飞行员控制飞行的姿态。四、案例分析(一)2024年12月,某航一架B737-800飞机执行济南-舟山航班时,在起飞爬升过程中偏航阻尼器断开、琥珀色指示灯亮。机组执行《快速检查单》处置程序确认偏航阻尼器无法接通,机组考虑到后续航段均有中度颠簸区,联系运行控制中心综合评估后决策备降南京并安全着陆。维修人员排故判断为1号SMYD、右侧ADIRU故障。偏航阻尼器检查单程序要求机组确认偏航阻尼器无法接通后需要避开中度及以上颠簸区飞行,如图7。而后续航路恰好有颠簸区域,存在飞机进入荷兰滚的风险,这是机组面临的威胁。机组对威胁进行了有效管理,做出备降的决策是恰当合理的,保证了运行的安全。(二)2024年5月,美国西南航空公司一架B737MAX客机从菲尼克斯飞往奥克兰,在32000英尺高度时发生荷兰滚,所幸机组成功控制住了飞机,最终安全降落。经调查,事件原因为偏航阻尼器工作异常导致的飞机进入荷兰滚。航后检查发现备用方向舵动力控制组件受损,飞机尾部受到严重的结构性损坏。机组在发生荷兰滚时能够重新控制住飞机状态展现了优秀的操纵能力,采用合适的控制方法来应对荷兰滚尤为重要。改出荷兰滚的要领总结如下:①首先要理解发生荷兰滚的原理,辨明飞机当前状态是否进入荷兰滚。②确认偏航阻尼器工作状态,及时人工干预飞机姿态和制定应对计划。避免飞机进入颠簸区域及上升高度,否则将导致飞机状态进一步失控。③如果飞机已经进入荷兰滚,要明确改出的方法是施加与偏航方向相反的方向舵控制,通过补偿偏航阻尼来抑制自发的偏航运动。切勿因飞机有坡度而下意识压盘改平机翼,横滚运动会产生逆向偏航效应进一步激励偏航运动,使荷兰滚加剧。④改出时观察机头移动方向,反向蹬舵阻止机头移动,蹬舵动作要柔和,观察有效再继续提供舵力直到消除偏航运动。总而言之,飞行员改出荷兰滚是一个精准、柔和的操作过程,切勿粗猛蛮干。偏航运动被抑制后,可以按需压盘改平飞机姿态。 五、总结偏航阻尼器的精准控制使民航客机飞行时进入荷兰滚的情况很罕见,但是偏航阻尼器系统可能会失效或发生故障,这将给后续飞行带来风险。机组应严格执行检查单要求操作,避开颠簸区域、按需降低高度,结合飞机状态及天气情况做出合理的决策。飞行员还应掌握荷兰滚产生的理论原因和必要的处置技术以应对偏航阻尼器失效引发的异常情况。由点及面,任何飞机的系统、设备都有发生故障的可能,此时考验的就是飞行员的胜任力,飞行员对其工作原理和失效处置程序的熟练掌握,是保证安全飞行的重要一环。飞行员实力的积累是信心的基石,以实力为根基,以信心为引擎,方能行稳致远。 -
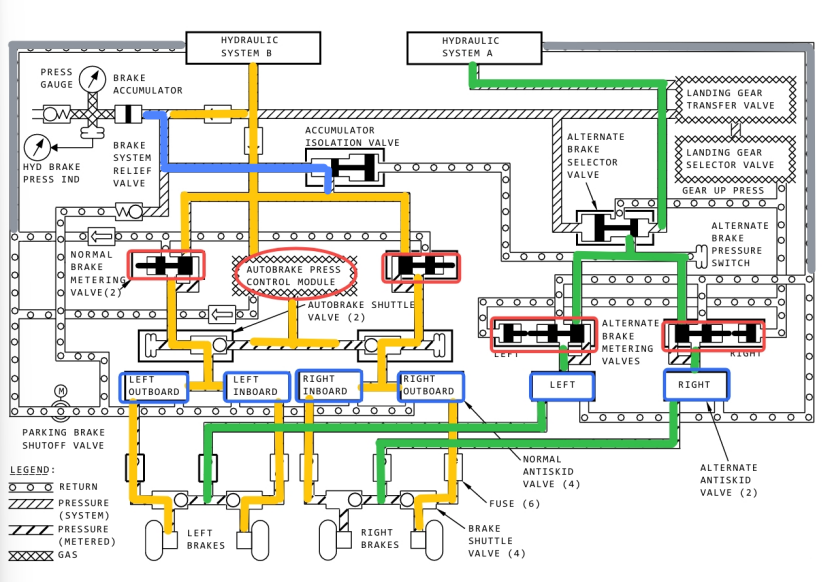
从“溜机”事件透视 B737-800 刹车系统 作者:培训部飞行培训中心 崔新新2025 年 10 月 13 日,某航 B737-800 在首都机场推出过程中,机务耳机故障,改用标准手势联络。机组在推出前误关了发动机驱动液压泵,且电动液压泵也未接通,飞机刹车压力仅靠刹车蓄压器(Brake Accumulator)维持。推出过程中机组起动双发,推出到位后,机组按机务手势“设置停留刹车”,却未核实刹车压力,机务见机组手势后即通知拖车撤离,此时由于蓄压器压力不足,飞机开始自行滑动。机组紧急接通 A、B 系统电动泵,液压恢复后才刹停飞机,但前起落架已与拖车发生碰撞,造成随动舱门、转弯作动筒罩等部件损伤。这起“非正常移动”事件,让我们重新反观B737-800的刹车系统,“停留刹车”并不是简单的“踩刹车”、“拉手柄”,稍有不慎,都有可能导致“刹而不驻”。一、B737-800的刹车系统架构:三个压力源、两条通路B737-800的刹车系统可以看作“三路进水”、“两路出水”、“一池蓄水”。每个主起落架机轮上有多片式液压作动的刹车装置,正常刹车由液压系统B供压,备用刹车系统由液压A系统供压。如果B系统低压,则A系统自动向备用刹车提供压力。在A和B系统都无压力时,刹车蓄压器留存的压力可提供至少6次的全刹车压力或至少8小时的停留刹车压力。刹车蓄压器由B系统提供压力。从刹车系统图中可以看到,图中黄色和绿色部分分别是B液压系统和A液压系统的供压管路,蓝色为刹车蓄压器的供压管路,即“三路进水”。灰色管路即“两路出水”,是刹车系统各个部件的回油管路汇集后回到液压系统的回路。图中ALTERNATE BRAKE SELECTOR VALVE( 备用刹车选择活门)可以实现正常刹车和备用刹车的切换,当A和B液压系统压力一样时,A液压系统的压力不会进入备用刹车系统,当B液压系统失效后,A液压系统自动进入备用刹车系统,自动转换成备用刹车。图中红色的方框位置是刹车计量活门,通俗理解,该部件就是根据刹车脚蹬的刹车程度计量供给刹车压力,越是用力蹬,刹车压力越大。图中蓝色方框的部件叫做防滞活门,顾名思义,就是防止机轮抱死,当探测到机轮滞动时,相应的防滞活门即减小压力直到滞动停止。从图中我们可以看出,正常刹车和备用刹车都有防滞保护,只不过正常刹车有4个防滞活门,提供每个机轮的防滞保护,而备用刹车只有2个防滞活门,提供每对机轮的防滞保护。图中红圈的位置是自动刹车系统,自动刹车系统通过自动刹车控制组件,让系统压力通过防滞活门进入刹车盘。二、停留刹车:不是“拉上手柄”就万事大吉在SOP第一部分总则第二章操作规则中有说明停留刹车的操作规则,当飞机停止滑行需要设置停留刹车,左座PF设置停留刹车后喊话:“停留刹车刹住”,右座PM检查压力显示正确后回答:“压力检查”。当设置停留刹车时,手柄通过连杆(Parking Brake Linkage)、止动爪(Latch Pawl)把两侧脚蹬锁在“踩下”位置。只要脚蹬被锁,正常/备用计量活门就保持“开出”压力,刹车片夹紧。同时,28 VDC 热电瓶汇流条供电到停留刹车关断活门(Parking Brake Shutoff Valve),使活门电动关闭,切断防滞活门的回油,刹车蓄压器或 B 系统压力被“堵”在刹车盘里,实现“无泄漏保压”。当停留刹车关断活门离开打开位置后,活门里的位置电门会点亮停留刹车灯。所以,停留刹车灯的点亮仅仅是说明停留刹车活门被电动关上,堵死了防滞系统的液压回路,不代表停留刹车能有效刹住飞机。从停留刹车系统的MEL分析中将进一步帮助我们理解停留刹车系统,在MEL中如果停留刹车灯不工作是可以放行的,但(M)程序需要测试停留刹车关断活门工作正常,如果停留刹车关断活门工作正常,则确定停留刹车灯不工作是纯指示故障,而后才能依据MEL32-04停留刹车灯故障放行飞机。如果测试发现停留刹车关断活门不工作,则需要按照MEL32-03停留刹车活门故障放行飞机,它的(M)程序中要求将停留刹车活门锁定在关闭位。从刹车系统图的分析我们可知,如果停留刹车活门锁定在关闭位,防滞系统的回油通路将被关闭,这也是停留刹车活门故障后,防滞需要断开、自动刹车系统需要关闭的原因。结语B737-800 的停留刹车系统看似“老派”——机械连杆、电动活门、蓄压器保压,却正因如此,任何一环的“小疏忽”都会被机械杠杆无限放大。把“2800 PSI”刻进肌肉记忆,把“交叉检查”做成条件反射,才能让每一次“拉手柄”都真正“刹住飞机”,避免“溜机”不安全事件重演。
-
Mr. Smith. Here’s your coat. It's quite chilly outside.Allow me to help you with your carry-on. Please check again for any personal belongings.Also our aircraft is parking at a remote stand, and a VIP shuttle bus will take you to the terminal.Please watch your step, as the ramp may be slippery from the rain.Wishing you all the best. Goodbye!Oh, thank you! I almost forgot it.That's very kind of you.Thanks you for your service. Goodbye!
-
提升飞行员防襟翼超速能力与训练导向 作者:飞行部七大队 鞠嘉最近几年,公司业内发生了多起襟翼超速事件。自 2019 年以来,在进近阶段发生的襟翼超速事件占比 62%,复飞阶段占比 38%,且主要集中在 1-8 月份,此阶段为大风乱流与雷雨叠加的时期。2024 年,公司总航班运行量占全民航的 3.86%,但襟翼超速事件占比却高达 10.3%,可见我们面临的形势十分严峻。要解决襟翼超速问题,需先明确其根源与诱因,才能针对性应对。大风乱流是导致襟翼超速的首要原因,尤其是顶风切变与顺风切变,不同高度的风对飞机产生的影响存在差异。一、风切变对飞机的影响(一)顺风切变1高度较高阶段(a 阶段):此阶段飞机高度较高,拥有充足的修正时间与空间,顺风切变带来的直接风险较低,但需警惕 “预判不足” 问题,避免后续风险累积。顺风切变会导致空速下降、升力减小,使飞机偏离初始下滑计划,不过通过及时修正,通常能恢复稳定进近。2高度适中阶段(b 阶段):该阶段飞机仍有一定修正时间与空间,需重点关注切变持续影响引发的空速持续性减小。顺风切变造成的空速下降与升力减小会让飞机偏离预定下滑道,机组需时刻监控飞机姿态与油门,避免过量修正动作,确保飞机维持稳定的进近数据。3接近跑道阶段(c 阶段):此阶段飞机已临近跑道,高度低、剩余着陆距离短,可修正时间极短,是顺风切变中风险最高的情况之一。进入顺风切变区后,指示空速会迅速降低,升力随之急剧减小,飞机因高度不足易出现 “掉高度” 且无法及时恢复的情况。此时机组需加油门复飞或执行风切变机动改出,低高度下机组工作与压力负荷较大,容易出现标准喊话缺失的问题,进而导致复飞后襟翼超速。(二)顶风切变1高度较高阶段(a 阶段):飞机高度高,有充足高度调整速度与轨迹,顶风切变直接风险较低,但需避免 “对环境预判不足” 导致后续风险累积。此阶段空速上升与轨迹上偏通常较为平缓,通过及时修正可轻松恢复稳定进近,但不应过度依赖自动油门修正,若修正不及时,需果断脱开自动系统进行人工干预。2稳定进近关键阶段(b 阶段):飞机处于稳定进近关键期,高度适中,有一定调整时间与空间,需警惕能量积累后引发的低高度修正量过大问题。顶风切变会导致空速上升、进近轨迹偏高,若未及时修正,会逐步累积 “过剩能量”,增加后续低空处置难度。3接近跑道阶段(c 阶段):飞机已接近跑道,高度低、可调整空间有限,是顶风切变中风险最高的场景。顶风会使空速剧增,导致飞机 “飘飞”,机组可能为抵消升力而过度推杆、收油门,这也是复飞过程中襟翼超速的诱因之一。速度较大时,若加油门瞬间未及时调整到复飞姿态,在复飞初始阶段极易引发襟翼超速。二、特殊机场环境影响(一)高原机场1.气候与空气特性1.气温:高原气温更低,海拔每升高 1000 米,气温约下降 6.5℃,且日温差大,可达 15-20℃。2.空气密度:高原空气密度小,在海拔 4000 米处,空气密度约为海平面的 65%。1.对飞机的影响1.发动机性能下降:低温虽能在一定程度上提高空气密度,但会增加燃油黏度,降低发动机启动效率,高海拔与低温叠加可能导致发动机推力进一步衰减。2.升力严重不足:升力与空气密度成正比,空气密度小使得飞机需要更大推力才能维持足够升力与速度。3.发动机推力衰减:喷气式发动机推力依赖进气量,空气密度小会导致进气量减少,推力可能衰减 30%-50%,直接影响发动机工作效率。(二)山地机场1气流特征:山地的强风、不均风、乱流、升降气流是主要风险源,尤其在低空飞行(如进近着陆、山区巡航)时,易使飞机产生偏差,甚至引发危险。山地地形阻挡会导致局部风速骤增(如山谷 “狭管效应”,风速可翻倍)。2对飞行的影响:若进近阶段遭遇强风,可能超出飞机侧风限制或导致切变产生,例如西宁机场就常受此类气流影响。三、信号不稳定问题(一)设备故障航空器上的接收器属于电子设备,时常会发生故障。故障发生时,机载接收器的监测系统会生成警报信号,提醒飞行员设备出现异常,数据不符合实际情况。若机载接收器出现瞬间不稳定问题,会导致某一时间段内接收到的信号不稳定,进而使下滑信号在某一点不够稳定。(二)信号传输干扰若分析发现仪表着陆系统下滑信号不稳定并非由地面设备、机载设备故障导致,则需重点排查从地面天线发射到机载天线接收的传输过程,传输过程中的干扰问题常导致下滑道信号不稳定,具体可分为外来信号干扰与反射信号干扰两类。1外来信号干扰:下滑信号传播过程中,若突然出现外来信号,且其频率与下滑频率接近,常发生信号叠加,导致 0DDM(调制度差)点偏移,使下滑道不稳定。若干扰信号源不在问题区域(距跑道端 9-11 公里),会在较大范围对下滑道造成干扰,干扰源通常位于距跑道端约 10 公里区域,此类情况出现概率较大。(备注:0DDM 指调制度差(Difference in Depth of Modulation,DDM)为 0 的情况,是航向信标系统中量化飞机偏离跑道中心线程度的关键参数,定义为 90Hz 与 150Hz 导航调制信号调制度的差值除以 100。在仪表着陆系统(ILS)中,理想情况下,DDM 为 0 的轨迹形成一条具有固定坡度(通常为 3°)的下滑道,飞机沿此下滑道可安全准确着陆。)2反射信号干扰:反射信号干扰包括地面反射场地、固定障碍物及移动物体因素。飞机接收到的下滑信号通常由地面反射波与直射波共同组成,若反射位置发生变化,或地面固定反射镜反射信号,会直接影响接收到的信号。但反射位置变化与固定障碍物对信号的影响通常是固定的,不会仅少数飞机反映信号不稳定,因此可排除场地变化与固定障碍物的影响。移动物体(如等待在滑行天线前起飞的飞机、在滑行道上行驶的飞机)形成的移动反射器,也可能导致下滑信号不稳定。四、机组操作相关问题(一)过度依赖自动驾驶与自动油门1自动油门修正逻辑:当自动油门探测到飞机空速低于 FMC(飞行管理计算机)目标速度的某个值时,会接通并前推油门杆,将速度保持在指令速度的 5 节以内;进近过程中,自动油门通常将速度保持在目标速度(如 VREF+5 节),若空速超过目标速度,自动油门会缓慢减小推力收油门。2核心原则:自动系统的核心价值是 “辅助飞行员”,而非 “替代飞行员”。在极端气象、传感器故障、高原复杂机场等场景下,飞行员需主动监控自动系统的修正效果,及时接管手动操作,才能最大限度发挥自动系统的安全保障作用,避免因过度依赖导致风险扩大。五、模拟机演示与训练(一)模拟机演示演示 1:着陆构型下不同速度对应的姿态变化目的:通过直观的姿态数据变化,帮助学员建立 “着陆构型下速度与姿态的关联认知”,理解 “速度调整对俯仰角、迎角的直接影响”,为后续复杂风况下的姿态控制奠定基础。操作设置:设置着陆构型,在静风条件下建立盲降后,选择 Vapp-5kt、Vapp+5kt、Vapp+10kt 三个速度节点,让学员观察并记录飞机对应姿态。演示 2:自动驾驶 + 自动油门接通时的风向调整(观察 AP/AT 修正逻辑)目的:让学员直观了解 AP(自动驾驶)与 AT(自动油门)的修正时机,理解 “风向变化时,AP 如何调整航向 / 姿态,AT 如何配合调整推力,共同维持航迹下滑道与速度”。操作设置:设置正常进近构型与速度,在 2000 英尺高度建立下滑道,模拟由静风到顶风增加 15kt 的场景,观察 AP/AT 对飞行状态的修正量、修正时机,以及飞机恢复稳定进近状态所需的时长和当前高度;在相同条件下再次进近,模拟由静风到顺风增加 15kt 的场景,按上述方法进行观察。(二)模拟训练1风况变化训练设置:在模拟机中设置相同机场,分别在 1500 尺 AGL(离地高度)、1000 尺 AGL、500 尺 AGL 三个高度层设置风况变化(1500 尺 AGL:中高度顶风转顺风;1000 尺 AGL:中低高度顺风转顶风;500 尺 AGL:低高度顶风 / 顺风)。观察重点:①机组人工操纵对飞机的预期调整效果及机组沟通情况,强化偏差喊话意识;②是否存在过量修正(如粗猛顶杆、修正量过大,在余度较大时将油门收到慢车或一次性加油门至接近复飞推力);③是否存在反复推拉杆、无逻辑大幅度收加油门、盲目跟指引、追下滑道,以及偏差大时强行进近或落地等行为。2下滑道故障与修正训练设置:在下滑道截获前设置 GlideSlop(下滑道)不工作,随后取消故障,让飞机从高高度截获下滑道,后续可结合顺风和顶风量的变化加大训练难度;模拟 GLIDESLOP 晚截获,或从下滑道 2/5 点开始截获。观察重点:①机组是否关注关键阶段的关键节点(如 AP 接通时,过 FAF(最后进近定位点)对下滑道的关注);②机组修正方法(偏差量较小时,是否依靠 AP/AT 并做好监控,依靠 AP/AT 将飞机修正到正常轨迹;偏差较大或 AP/AT 修正量过大、不足或存在超限风险时,是否脱开 AP/AT 进行人工修正);③观察机组人工修正方法与技巧,是否存在盲目跟指引等过量修正行为。3预防复飞过程中襟翼超速的专项训练复飞襟翼超速原因:①复飞过程中动作不标准,在起始复飞阶段引发襟翼超速;②高工作压力下标准喊话缺失,AT 未及时接通,在高度改平或俯仰姿态减少时出现问题;③复飞起始高度与目标高度差值仅 1000-2000 尺时,状态监控不及时。针对性训练科目:①正常复飞程序训练:在不同高度执行复飞,观察机组标准喊话与标准程序执行情况;②低高度人工飞行复飞训练:飞机在 1000 英尺以下人工飞行,当前高度与复飞高度差值为 1000-2000 尺时,执行复飞程序;③机长能力提升训练:模拟副驾驶喊话缺失、无法辅助执行标准复飞程序的场景,训练机长独立完成复飞(包括后续高度改平后的程序操作与飞机状态监控)。训练核心:通过以上三类训练,强化机组标准喊话意识、提升 CRM(机组资源管理)能力与机长个人能力,以应对不同环境和特情下复飞后的飞机状态掌控。重点关注 “非预期且高度余度较小时,人工飞行对飞机态势的感知”,例如机组接通 AP/AT 后,是否发现修正不及时,或接通 AP 后未关注 FMA(飞行方式 annunciator,飞行方式通告器)导致穿高度等问题。在三类训练中,均可在复飞后改变风向风速,模拟现实中大风乱流天气的特点,提升训练真实性与有效性。
-
优秀飞行教员的“能力清单” 作者:飞行部十一大队张纪伟安全是民航业的生命线,飞行训练作为筑牢安全防线的核心支撑,其质量直接决定民航安全水平。当前,民航局全面推行飞行员技能全生命周期管理体系(PLM),我国民航飞行训练已从传统 “经验驱动”,迈入 “规章引领、数据支撑” 的科学化新阶段。飞行教员作为训练实施者与质量把关人,其能力是安全关键,唯有打造数量充足、素质过硬的专业化教员队伍,才能切实保障民航飞行安全。从全球看,基于胜任力的训练与评估(CBTA)是提升航空安全的核心战略,国际民航组织(ICAO)、欧洲航空安全局(EASA)出台 CBTA 飞行教员培养规范,国际航空运输协会(IATA)发布指南明确教员资质、能力与培养流程。在国内,CBTA 理念持续深化:2012 年民航局首次在多人制机组驾驶员执照训练引入 “基于能力的培训”,2023年《循证训练( EBT)实施方法》进一步明确 CBTA/EBT 飞行教员资质与能力指标,相关制度日趋完善,为教学工作奠定坚实基础。当前正值民航飞行训练全面转向CBTA模式的关键时期,教员的角色价值愈发凸显——我们不仅是飞行技能的“传帮带”者,更是训练质量的核心管控者。结合国内外规章要求、行业实践与评估体系,我将飞行教员应具备的能力归纳为以下三大类:一、基础资质:迈好教学的“第一步”基础资质是成为飞行教员的“敲门砖”,须严格符合《民用航空器驾驶员合格审定规则》(CCAR-61)、《大型飞机公共航空运输承运人运行合格审定规则》(CCAR-121)等规章要求,具体包括:有效的体检合格证、相应等级的飞行执照、达标的英语等级、足够的飞行运行经历,以及经官方认可的训练资格等。二、核心能力:撑起教学的“硬实力”根据IATA Guidance Material and Best Practices for Instructor and Evaluator Training以及《循证训练 (EBT)实施方法》(AC-121-FS-138R1),我把飞行教员的核心能力分成了技术能力和非技术能力两大维度:(需说明的是,其中技术能力的要求源自上述文件,而非技术能力部分在《循证训练(EBT)实施方法》中尚属“留白”状态;本人结合理论学习、多年教学及受教经验,对该部分内容进行了补充和总结。)(一)技术能力直接关乎训练的专业性与安全性,是教学的核心基础,主要包括以下两部分:飞行员9大核心胜任力:这是我们开展教学的“基本功”,飞行教员需率先融会贯通,方能有效传授学员。具体包括知识应用、规章与程序执行、航径管理(人工或自动)、沟通能力、领导力与团队合作、情景意识、工作负荷管理、问题解决与决策能力。2.4项专属教学能力:包括管理学习环境、专业教学能力、与学员互动、科学评估能力。(1)管理学习环境能力是教学实施的重要基础。教员需系统规划与周密准备训练所需的设备及资源,明确训练目标与角色分工,精心设计并有效管理贴合训练目标的场景条件,同时对当天所涉及的飞行科目与剖面特点进行细致讲解。在教学过程中,应将威胁与差错管理(TEM)融入训练的全流程,并在适当时机以恰当方式实施干预指导,灵活应对环境变化,最大限度减少训练中断。通过合理统筹时间、教学媒介与设备资源,确保训练目标高效达成。(2)教学能力是提升训练实效的核心。教员应严格依据批准的资料和训练大纲,选用合适的教学方法,确保教学内容贴近实际运行,兼具相关性与真实性。在教学过程中动态调整科目强度,持续评估学员的胜任水平;训练内容应具备可操作性、实用性和明确的目标导向,同时采用以学员为中心的反馈方法,鼓励学员开展自我评估并自主纠错,促进其高效掌握知识与技能。(3)与学员互动能力是拉近教学距离、建立信任关系的关键。教员应以耐心和同理心为基础,主动构建互信、明确的师生角色认知,通过有效指导和针对性支持激发学员的学习动力。鼓励学员积极参与、互助协作;始终以身作则,展现专业素养、正直品行和良好的行为模范。教员应主动寻求和接受反馈,致力于持续自我提升,并全面支持公司及局方的训练目标与要求。(4)评估能力是检验教学成效与推动持续改进的重要保障。教员应严格遵守公司及局方的相关要求,提前向学员说明评估流程,客观公正地进行评分,并依据评估结果提供清晰、建设性的反馈。教员需定期反思自身教学表现,明确发展需求,主动征求他人意见,实现教学品质与个人能力的循环提升。同时,应如实反映训练系统的优势与不足,为持续优化公司训练体系建言献策。通过多年模拟机受教经历与持续学习积累,我认为一名优秀的飞行教员可在教学过程中通过以下方式系统展现其优秀的教学能力:开展教学活动的首要前提是严守 “规范性底线”—— 必须严格依据公司审定通过的教学大纲组织教学,严禁以个人经验随意调整教学内容。在教学方法选择层面,需兼顾 “针对性” 与 “实用性”:针对新学员,宜采用 “示范 - 模仿 - 纠错” 的阶梯式教学模式,如发现新学员在处理 “发动机失效” 科目出现问题时,教员先在模拟机上完整演示标准操作程序,再指导学员分步开展模仿训练;针对复训学员,应采用“问题导向式教学”。例如,若发现学员在执行非精密进近时,表现出对下降剖面控制不稳定、选择继续进近还是复飞决策迟疑等问题,待训练结束后,教员可借助模拟机QAR数据及舱内视频回放,与学员共同复盘整个进近过程,重点分析其对于非精密进近程序、下降率管理以及复飞决断时机等环节存在的偏差。在后续课程中可进行针对性强化训练,从而有效提升其非精密进近表现的整体稳定性与可靠性。同时,教学中需动态调整训练强度,当学员操作规范、流程顺畅时,应减少干预,保障其自主掌控训练节奏。贯穿教学全程的 “动态评估与反馈”,是确保训练实效的闭环保障:一方面,需持续跟踪学员胜任水平,如在模拟机训练中,通过“程序规范化”、 “操作精准度”、“决策合理性”等量化指标,动态判定学员是否达成阶段训练目标;另一方面,需引导学员开展 “自我评估”,每次训练结束后,先由学员自主梳理 “优势与不足”再由教员补充反馈,避免单向点评导致的信息偏差。反馈环节需遵循 “以学员为中心” 的原则:针对不足项,需提供可落地的改进方案;针对进步点,需进行具体性肯定,确保学员明确改进方向的同时,增强学习信心。(二)非技术能力是教学的重要支撑力量,主要包括以下两部分:作风胜任力:如严谨细致的工作态度、对安全的敬畏心、始终遵守规章的自觉性——这些不仅是教员自身的职业准则,更是为学员树立的“榜样标杆”。心理胜任力:如在复杂教学场景(如学员多次出错、突发训练问题)中保持情绪稳定,以及长期教学中所需的抗压能力、耐心和责任心,这些素质有助于持续输出高质量教学。三、教学绩效转化能力:检验教学实效的“试金石”仅具备能力还不够,能否将能力转化为实际教学成果,才是对教学水平的直接检验。该能力主要包括以下两方面:1.客观绩效达成:如完成规定的教学课时、参与公司课程开发、帮助学员提升考试通过率等“硬指标”,这是教员履职的基本要求。2.主观质量优化:如积极配合局方和公司的质量检查、主动收集学员反馈、不断调整教学方法以改善体验,提升大家对教学工作的认可度,这是督促我们持续进步的关键。 对飞行教员而言,构建科学全面的教学能力体系,不仅是顺应行业发展的必然之举,更是守护民航安全责任的核心要求。未来,随着PLM体系的深化与EBT训练模式的全面落地,我们更应不断打磨自身能力,共同为公司飞行训练质量的提升、为中国民航的高质量发展筑牢人才根基!