搜索到
135
篇与
的结果
-
 有关机动裕度的一个问题 问题:为什么起飞收襟翼过程中,如果达到襟翼1机动速度马上收襟翼UP,俯仰限制指示会下移,如果达到襟翼1机动速度,再增加些速度接近UP速度时收襟翼至UP,俯仰限制指示就不会下移?提问人:郑宇杰关于起飞收襟翼过程中,当速度达到襟翼1机动速度时,直接收襟翼至up位或者继续增速然后再将襟翼收至UP位对飞机机动裕度的影响的一些思考。此图为达到到襟翼1机动速度,直接收襟翼至up位时抖杆的机动裕度此图为达到襟翼1机动速度,继续增加速度10-15节至接近up速度时,再收襟翼至up速度时抖杆的机动裕度。下面是公司《737NG/MAX飞行机组训练手册》关于起飞收襟翼计划的描述:下图是公司《737NG/MAX飞行机组训练手册》关于收襟翼过程中到抖杆的机动裕度的图解上图中横轴为飞机的速度,纵轴为机动裕度。从图中可以看出在收襟翼过程中,绝大多数情况飞机都具备“全机动能力”。而襟翼1位向UP位收上时是不具备“全机动能力”的。(全机动能力(full maneuver capability)是B737飞机进行机动裕度保护的一个重要概念。这一概念贯穿于B737飞机所有的飞行阶段。B737飞机的气动性能设计和飞行程序设计能够保证飞机在绝大多数情况下都具备全机动能力。)图中还可以看出:1、在襟翼不变的情况下,随着速度的增加,飞机的机动裕度也会增加。(如图中红色箭头)2、当襟翼收向上一个位置后,升力减小会导致飞机的机动裕度突然下降。(如图中蓝色箭头)3、达到襟翼1机动速度时,马上由襟翼1收至襟翼UP,这时候飞机的机动能力会下降到全机动能力(40度坡度)以下,但仍然具备30度以上坡度能力(图中黄色圆点)(这就是为什么俯仰限制符号会往下移动)4、如果达到襟翼1机动速度,让飞机继续增速10-15节至接近UP速度时,再收襟翼至UP,此时可以保证飞机在整个收襟翼的过程中具备全机动能力(40度坡度),(图中绿色五角星)。(这就是为什么俯仰限制符号不会往下移动) 飞行部九大队 杨柳
有关机动裕度的一个问题 问题:为什么起飞收襟翼过程中,如果达到襟翼1机动速度马上收襟翼UP,俯仰限制指示会下移,如果达到襟翼1机动速度,再增加些速度接近UP速度时收襟翼至UP,俯仰限制指示就不会下移?提问人:郑宇杰关于起飞收襟翼过程中,当速度达到襟翼1机动速度时,直接收襟翼至up位或者继续增速然后再将襟翼收至UP位对飞机机动裕度的影响的一些思考。此图为达到到襟翼1机动速度,直接收襟翼至up位时抖杆的机动裕度此图为达到襟翼1机动速度,继续增加速度10-15节至接近up速度时,再收襟翼至up速度时抖杆的机动裕度。下面是公司《737NG/MAX飞行机组训练手册》关于起飞收襟翼计划的描述:下图是公司《737NG/MAX飞行机组训练手册》关于收襟翼过程中到抖杆的机动裕度的图解上图中横轴为飞机的速度,纵轴为机动裕度。从图中可以看出在收襟翼过程中,绝大多数情况飞机都具备“全机动能力”。而襟翼1位向UP位收上时是不具备“全机动能力”的。(全机动能力(full maneuver capability)是B737飞机进行机动裕度保护的一个重要概念。这一概念贯穿于B737飞机所有的飞行阶段。B737飞机的气动性能设计和飞行程序设计能够保证飞机在绝大多数情况下都具备全机动能力。)图中还可以看出:1、在襟翼不变的情况下,随着速度的增加,飞机的机动裕度也会增加。(如图中红色箭头)2、当襟翼收向上一个位置后,升力减小会导致飞机的机动裕度突然下降。(如图中蓝色箭头)3、达到襟翼1机动速度时,马上由襟翼1收至襟翼UP,这时候飞机的机动能力会下降到全机动能力(40度坡度)以下,但仍然具备30度以上坡度能力(图中黄色圆点)(这就是为什么俯仰限制符号会往下移动)4、如果达到襟翼1机动速度,让飞机继续增速10-15节至接近UP速度时,再收襟翼至UP,此时可以保证飞机在整个收襟翼的过程中具备全机动能力(40度坡度),(图中绿色五角星)。(这就是为什么俯仰限制符号不会往下移动) 飞行部九大队 杨柳 -
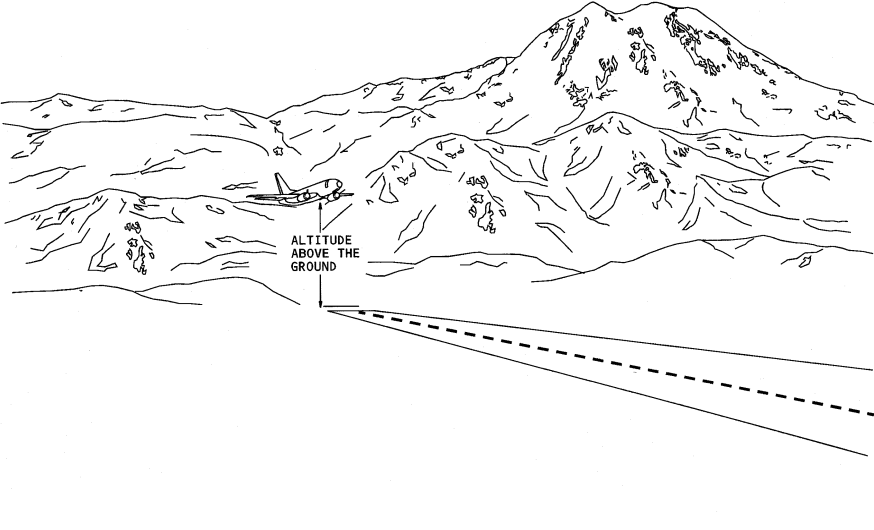
无线电高度表失效,根据MEL放行后对飞行的影响。 无线电高度表,测量飞机到地面垂直距离用的机载无线电设备,是重要的飞行器仪表之一。它测量的高度是飞机距离地面的真实高度,由收发机、天线和指示器组成。民用航空器上使用的无线电高度表一般为低高度无线电高度表(LRRA:LowRangeRadioAltimeter),测量范围为-20到2500英尺,通常在飞机进近和着陆阶段使用定义:以地面(或海面)作为反射面的一种测高雷达。它能在各种气候条件下精确测量飞机离地面(或海面)的相对高度,是现代飞机上必要的导航设备之一。亦称雷达高度表(Radar Altimeter)。按调制方式不同,分为调频连续波无线电高度表和脉冲调制无线电高度表。这两种体制的无线电高度表只要设计合理,均可达到很高的测高精度,都得到了广泛的应用 。系统测高原理飞机向地面发射无线电波,经地面反射被飞机接收机接收。无线电波经历行程等于无线电波传播速度乘以电波传播时间。电波传播速度为恒值,只要测出这段时间便可求出飞机飞行高度。系统组成及功能B737NG飞机有两套无线电高度表。每套无线电高度表包括一部收发机和两部天线。收发机产生射频信号从发射天线发射到地面,地面反射的信号经接收天线接收送回收发机。收发机对信号进行处理得到飞机的飞行高度值。高度值和信号的有效性由收发机送往两条数据总线。数据总线1的数据送到飞行管理计算机FCC和自动油门计算机。数据总线2的数据送到近地警告计算机GPWC、防撞系统TCAS计算机、数字飞行数据采集组件DFDAU、雷达WXR收发机及显示电子组件DEU。正常情况,系统1的高度值由DEU1控制显示在机长侧显示组件DU上,系统2的高度值由DEU2控制显示在副驾驶侧DU上。当飞机着陆机轮触地时,要求高度表指示为0,但发射机发射信号输出孔到接收机返回信号输入孔之间信号传播的路径实际包括收、发天线连接的同轴传输线及天线到地面的路径。为此,在高度收发机电路中设计有抵消飞机安装延时(AID)的电路。B737NG飞机的无线电高度表收发天线安装于机身前部,前起落架之后的机腹上。当飞机带拉平仰角着陆时,要求主起落架机轮触地时高度表指示为零,这也就是为什么飞机前起落架触地后,无线电高度表指示却变为-4。控制与显示无线电高度值和选择的决断高度值显示在主飞行显示器PFD的右上角。高度值在2500英尺以上不显示。机组通过各自侧的EFIS控制面板控制决断高度参考值和复位决断高度警告显示。将EFIS控制面板上的MINS电门选到RADIO位置,再左右旋转电门调节决断高度参考值在-1到999英尺之间。通过按压RST来复位决断高度警告显示。2500英尺以下,无线电高度值为白色数字显示,0到1000英尺时,白色数字会被一圈刻度盘包围,刻度盘的周长会随着飞机飞行高度的减小(增大)而减少(增加),同时一个绿色的决断高度游标会显示在刻度盘上。在无线电高度数值之上是绿色的决断高度参考值。当飞机的无线电高度等于选择的决断高度参考值时,无线电高度数值会从白色变为琥珀色,刻度盘连同决断高度游标也会变为琥珀色并闪烁三秒。当飞机低于2500英尺并且仪表着陆航向道偏离指示出现时,跑道符号就会出现。在飞机高度从200英尺降到0英尺的过程中,跑道符号会慢慢靠近飞机符号底部,用来形象的指示飞机到跑道的距离。电源 RA 收发机1 的电源是来自转换汇流条1 的115V 交流电。RA 收发机2 接收来自转换汇流条2 的115V 交流电。 对运行的影响:1、MEL要求“HGS运行要求两套系统都工作”。公司SOP中要求使用HUD的程序是:低能见度起飞(RVR低于400米时的起飞),特殊批准I类进近,特殊批准Ⅱ类进近和标准Ⅱ类进近。所以,当无线电高度表故障执行MEI保留后,不能执行低能见度起飞(RVR低于400米时的起飞),特殊批准I类进近,特殊批准Ⅱ类进近和标准Ⅱ类进近。2、MEL要求不能执行RNP AR 程序。3、进近最低标准或操作程序不要求使用它。公司SOP中要求使用无线电高度作为最低标准的情况是:特殊批准I类进近,特殊批准Ⅱ类进近和标准Ⅱ类进近。所以,当无线电高度表故障执行MEI保留后,不能执行低能见度起飞(RVR低于400米时的起飞),特殊批准I类进近,特殊批准Ⅱ类进近和标准Ⅱ类进近。4、O程序:“当一侧无线电高度表不工作时,进近和着陆不要使用下列系统”:A相应的自动驾驶B相应的飞行指引仪C自动油门公司SOP禁止使用自动驾驶着陆,禁止使用自动油门着陆。当一侧无线电高度表故障后,进近时不允许使用相应的飞行指引仪。5、预测风切变系统(PWS)失效。当油门杆调定为起飞推力,即使发动机关车或IRS没有校准,或在空中低于无线电高度2300英尺(视气象雷达类型不同也可能是1800英尺),PWS功能开启,低于无线电高度1200英尺时发出预测风切变报警。起飞和着陆过程中,新的预测风切变警戒在80海里/小时和400英尺无线电高度之间被抑制,新的警告报警在100海里/小时和50英尺的无线电高度之间被抑制。这些抑制不能消除现有的预测风切变报警。如果警告/警戒事件出现在那些边界前,警告/警戒将会保留在显示上且会出现完整的音响喊话。如果任一无线电高度表故障,将会引起预测风切变功能失效,飞机显示PWS FAIL,气象雷达无法根据无线电高度逻辑来自动开启和关闭PWS。6、GPWSGPWS使用左侧无线电高度表的信号来进行近地提醒和警告逻辑计算。如果左侧无线电高度数据无法获取,则使用右侧无线电高度。如果仅剩工作的唯一无线电高度表也失效,将会引起EGPWS七大功能失效:下降率过大,地形接近率过大,起飞后掉高度,不安全的离地高度,低于下滑道偏离过大,咨询报出,风切变警告。以上七大功能均是基于无线电高度进行计算和自动报话的。同时,飞机进近正常的自动高度喊话也不工作。无线电高度喊话B-5501, B-5516, B-5546, B-5548在进近期间 GPWS 提供下列高度喊话:2,500 英尺 – TWENTY FIVE HUNDRED1,000 英尺 – ONE THOUSAND500 英尺 – FIVE HUNDRED100 英尺 – ONE HUNDRED50 英尺 – FIFTY30 英尺 – THIRTY20 英尺 – TWENTY10 英尺 – TEN5 英尺 – FIVEB-1226 - B-1273, B-1358 - B-1511, B-1731 - B-1986, B-5111 - B-5491, B-5513, B-5536 - B-5543, B-5560 - B-5727, B-5781 - B-5787, B-6985 - B-7979在进近期间 GPWS 提供下列高度喊话:500 英尺 – FIVE HUNDRED(智能喊话)100 英尺 – ONE HUNDRED50 英尺 – FIFTY40 英尺 – FORTY30 英尺 – THIRTY20 英尺 – TWENTY10 英尺 – TENB-1337, B-20EY - B-220X在进近期间 GPWS 提供下列高度喊话:2,500 英尺 – TWENTY FIVE HUNDRED1,000 英尺 – ONE THOUSAND500 英尺 – FIVE HUNDRED400 英尺 – FOUR HUNDRED300 英尺 – THREE HUNDRED200 英尺 – TWO HUNDRED100 英尺 – ONE HUNDRED50 英尺 – FIFTY40 英尺 – FORTY30 英尺 – THIRTY20 英尺 – TWENTY10 英尺 – TENB-1730, B-1987, B-1988, B-5728 - B-5758, B-5856在进近期间 GPWS 提供下列高度喊话:1,000 英尺 – ONE THOUSAND500 英尺 – FIVE HUNDRED100 英尺 – ONE HUNDRED50 英尺 – FIFTY40 英尺 – FORTY30 英尺 – THIRTY20 英尺 – TWENTY10 英尺 – TEN7、TCASTCAS计算机将无线电高度设定敏感等级用于迎面飞机TA/RA计算和确定入侵的飞机是否在地面上。两部无线电高度表都会向TCAS计算机发送数据,而后者只会使用一个数据,只有当这个数据无效时会切换数据源,一般来说是优先使用第一部无线电高度表的测量数据。无线电高度约1500英尺以下,增加下降率决断提示(INCREASE DESCEND RA)被抑制,无线电高度约1100英尺以下,下降决断提示(DESCEND RA)被抑制,无线电高度约1000英尺以下,RA被抑制。1000英尺以下在应答机面板上选择交通提示/决断提示方式时仅TA方式将自动工作,并且在导航显示(ND)上显示TCAS信息仅TA(TA ONLY),无线电高度约500英尺以下,所有TCAS语音信号被抑制。如果没有有效的无线电高度数据可用,ND上将显示TCAS FAIL。8、FCC根据FCC软件版本,一部无线电高度表失效会使相关的AFDS使用LNAV时限制坡度8°。如果两侧无线电高度表都失效,则会使两部AFDS在襟翼放出时所有横滚方式或襟翼收上使用LNAV时限制坡度为8°。此功能的限制将会极大影响飞行员对飞机的操纵,使飞机不能够为进离场机动和限制空域的航向改变提供足够的转弯坡度。总结综上所述,无线电高度表故障大多在低高度影响飞机的相关功能。作为飞行员,在面对无线电高度表失效MEL放行的情况时,必须深刻认识到这一故障对飞行安全的潜在威胁。在执行飞行任务前,应仔细研读MEL条款,结合公司SOP明确各项限制,提前做好充分的应对准备。飞行过程中,尤其是在进近和着陆等关键阶段,要时刻保持高度警惕,严格遵守不使用相关自动驾驶、飞行指引仪和自动油门等规定,密切关注飞机状态和各项仪表信息。机组还要清楚地了解这一故障对PWS、GPWS、TCAS、FCC等系统功能的影响,熟悉各系统失效后的替代措施和应急操作流程。在遭遇突发状况时,凭借扎实的专业技能和丰富的经验,冷静、果断地做出正确决策,确保飞行安全。在日常工作中,我们也应积极参与相关培训和学习,不断提升自身应对特殊情况的能力,为保障每一次飞行任务的顺利完成贡献自己的力量。同时,维护人员也应及时对故障进行排查和修复,确保飞机尽快恢复到最佳适航状态。只有各岗位协同合作,才能有效降低因无线电高度表失效带来的安全风险,保障每一次飞行任务的安全与顺利。 飞行七大队:赵宏涛 刘凯宁
-
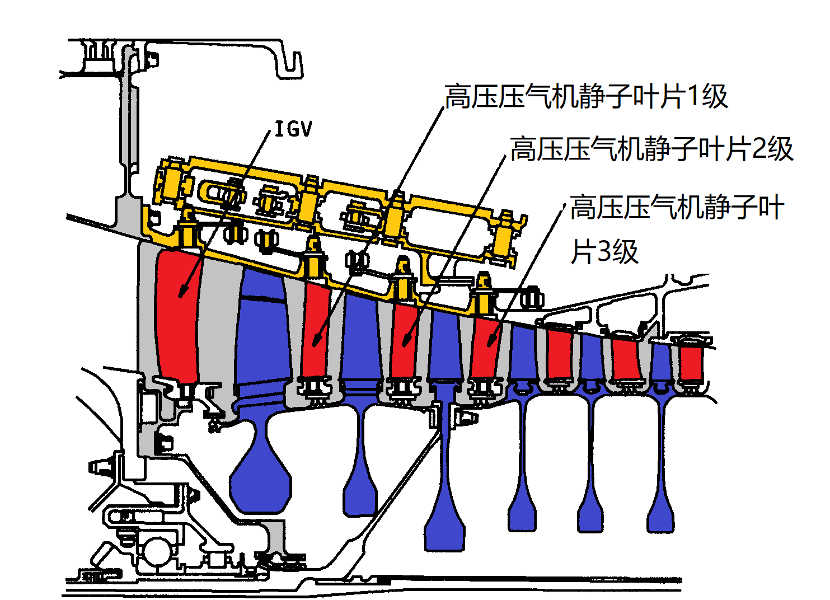
CFM56-7B发动机VSV系统故障及处置方法简析 山东航空股份有限公司 李军涛摘要:在CFM56-7B发动机的核心机部分,除了安装在N1、N2轴上的压气机叶片,还安装有静子叶片。其中高压压气机的静子叶片前三级的角度在工作过程中是可调整的,连同进气导流叶片和其它设备,共同构成可调静子叶片(VSV)系统,用以提高发动机的工作稳定性,防止发动机的失速和喘振。本文将简要介绍可调静子叶片(VSV)系统故障时发动机的现象,处置措施等。关键词:发动机;可调静子叶片;喘振;检查单2025年1 月 18 日,国内一架B737-800飞机执行九江至海口航班,起飞后爬升至高度4200米时,机组在驾驶舱听到“闷响”,发动机参数正常。后从4200米爬升至6000米过程中,发生第二、三声“闷响”,并伴随右侧发动机N1从76% 瞬间降到73% ,其它参数正常。机组执行《发动机限制或喘振或失速》检查单,右侧发动机保持在慢车推力,经评估后,飞机备降南昌。后经维护人员初步判断是右侧发动机的VSV系统故障导致了发动机喘振。B737-800飞机安装了CFM56-7B发动机,接下来,本文将对CFM56-7B发动机的VSV系统进行简单介绍,并对其故障进行简单分析,如有不当之处,敬请各位读者批评指正。一、VSV的功能及位置(一)VSV功能简介VSV的全称是可调静子叶片(Variable Stator Vane),这里的“可调”指的是静子叶片的位置在工作过程中是可调整的。CFM56-7B发动机的全称是双转子轴流式涡轮风扇发动机,双转子指的是N1和N2转子。在发动机中,与转子相对应的结构是静子,亦可称之为定子,在此我们统称为静子。静子上安装的叶片称之为静子叶片,其主要作用是引导空气流向转子叶片,并经由转子叶片压缩后流向下一级叶片或燃烧室。静子叶片分为固定型和可调型,在CFM56-7B发动机的高压压气机部分,与旋转的高压压气机叶片对应的是高压级静子叶片。高压级静子叶片部件前三级叶片的位置(角度)是可调型,其后的静子叶片属于固定型。加上在高压压气机之前安装的进气导流叶片(IGV),共形成四级的可调静子叶片,如图1红色部分所示。(二)VSV系统的组成和位置可调静子叶片(VSV)系统包括两个作动筒、两个摇臂组件、四个驱动环和四级叶片。在发动机机身的左右两侧各有一个作动筒和一个摇臂组件。四个驱动环和四级叶片则位于高压压气机机匣内。如图2所示。二、VSV系统工作原理简介可调静子叶片系统的工作是由EEC(电子发动机控制)控制的。EEC通过DEU(显示电子组件)从大气数据惯性基准组件(ADIRU)处获得大气总温(TAT)、全压(PT)、静压(PO)数据,并从发动机传感器获得N1转速、N2转速和高压压气机进口气温(T25)等参数。EEC获得上述数据后,会计算一个指令信号并发送到液压机械组件(HMU),HMU通过控制旁通活门、伺服压力调节器、VSV电子伺服活门等一系列设备输送伺服燃油压力到VSV的两个活塞式作动筒。燃油压力驱动作动筒移动,作动筒推动摇臂组件转动,摇臂组件推动4个驱动环转动以调节可调静子叶片(VSV)的位置。正常情况下,可调静子叶片的角度随着N2转速而变化。N2在慢车转速时,叶片在“关”位。当N2转速增加时,叶片位置随之增大,并在N2转速达到95%时,叶片达到“全开”位。在CDU(控制显示组件)的发动机维护页面,显示了可调静子叶片的工作位置,如图3所示。其中,DEMAND显示EEC计算的指令位置,而POSITION则显示传感器探测的实际位置。当相应参数不可用时,会显示“??”,当参数超限时则会显示“--”。在大气总温(TAT)较低的低高度飞行时,如遭遇结冰条件,EEC指令可调静子叶片调整到接近关位,以此来增强发动机的工作稳定性。当N1或N2转速超过红线的1%时,可调静子叶片则被指令完全关闭。三、关于发动机喘振的简介喘振的发生一般会伴随着失速。我们知道,飞机的失速是因为气流流经飞机机翼时,超过了临界迎角,使得机翼上部后方的气流变得紊乱,从而使得飞机的升力减小不足以克服重力,飞机进入失速状态(如图4所示)。发动机的N1和N2轴上也安装有数级的叶片,这些叶片类似于飞机的机翼,当气流进入发动机流经这些叶片时,因为某些原因(如气流进入发动机的角度大)可能导致超过叶片的临界迎角,从而在叶片后部产生紊流区,此种情况称之为发动机的失速。众多叶片产生的紊流区会引起发动机的异响、气流倒流、震动指数增加等喘振现象。为了防止这一现象,可调静子叶片(VSV)系统应运而生。通过调节高压压气机内的空气流量,改变气流流经静子叶片的角度,防止发动机内部叶片进入失速状态,从而增加发动机压气机效率和喘振裕度。CFM56-7B发动机还设计了高压涡轮间隙主动控制(HPTACC)、低压涡轮间隙主动控制(LPTACC)、可调放气活门(VBV)、过渡放气活门(TBV)等设备来防止发动机失速、提高发动机的工作稳定性和效率。这些设备同样由EEC通过HMU伺服系统控制。四、VSV系统故障的原因简析及处置方法(一)事故原因简析导致可调静子叶片(VSV)系统故障的原因大致可以分为两个情况:一是自身部件出现问题,由于组成可调静子叶片系统的部件众多,且随着飞机使用年限的增加,部分部件出现老化、金属疲劳、损伤的概率也逐渐增加,这需要平时良好的维护保养能力来预防;二是外来物损伤。如安装在高压压气机之前的低压压气机如果出现结冰,在其工作后可能将冰甩向后面的高压压气机部分,从而损伤可调静子叶片。当然,鸟击也可能导致异物进入发动机内涵道,从而损坏可调静子叶片。(二)处置方法当可调静子叶片系统在地面发生故障,如可调静子叶片不在正确的位置时,EEC会发送一个不可放行的信息至DEU,并点亮ENGINE CONTROL(发动机控制)灯,此时需要维护人员进行专业的处理。在空中,因可调静子叶片系统主要作用是增加压气机效率、防止发动机失速和增加发动机喘振裕度,所以,其失效后,极有可能引起上述现象。本文文首所示案例中,发动机出现了数声“闷响”,并伴有N1转速的改变,这种现象符合《发动机限制或喘振或失速》检查单中“听到发动机异常噪音,可能伴有机体振动”情况的描述(如图5所示),所以应该执行此检查单。需要强调的是,在执行此检查单的过程中,如果符合第3步第一种情况即:发动机指示稳定且 EGT 稳定或下降,则执行第4步,如图6所示。在第6步,无论是“发动机运转正常”还是“发动机在减推力状态运转”下将应答机选择器置于“TA”位,检查单至此结束。在真实情况下,检查单虽然已完成,但需要考虑到飞机在接下来的运行中可能会遭遇的一些非正常情况,如遭遇其它航空器、绕飞结冰区等需要做出大的机动动作如爬升等情况。航空公司为了保证航班运行安全和旅客的舒适度,一般会选择在最近合适机场着陆。如文首所列案例,飞机处于起飞爬升阶段,右侧发动机已经工作在慢车推力,两侧发动机出现了不对称情况,这本身就是一种威胁。如果继续飞往海口的话,必然存在一定的风险,所以机组果断备降南昌昌北国际机场,不但保证了旅客安全,也实现了飞行运行的安全。五、总结综合以上情况,可调静子叶片(VSV)系统的工作是自动的,由EEC通过HMU进行控制。在飞行中的驾驶舱内,并没有可调静子叶片系统故障的相关指示。飞行员可以根据发动机的非正常工作情况实施相应的非正常检查单,并通过对当前情况的判断,使用空管、公司AOC、机务等一切可使用的资源这一CRM理念来保障航班的正常运行,从而安全、高效地完成航班生产任务。参考资料:《B737-800飞行机组使用手册》;《B737-800机组标准操作手册》;《B737-800飞行机组训练手册》;《B737-800快速检查单》;《B737-800飞机维修手册》。
-
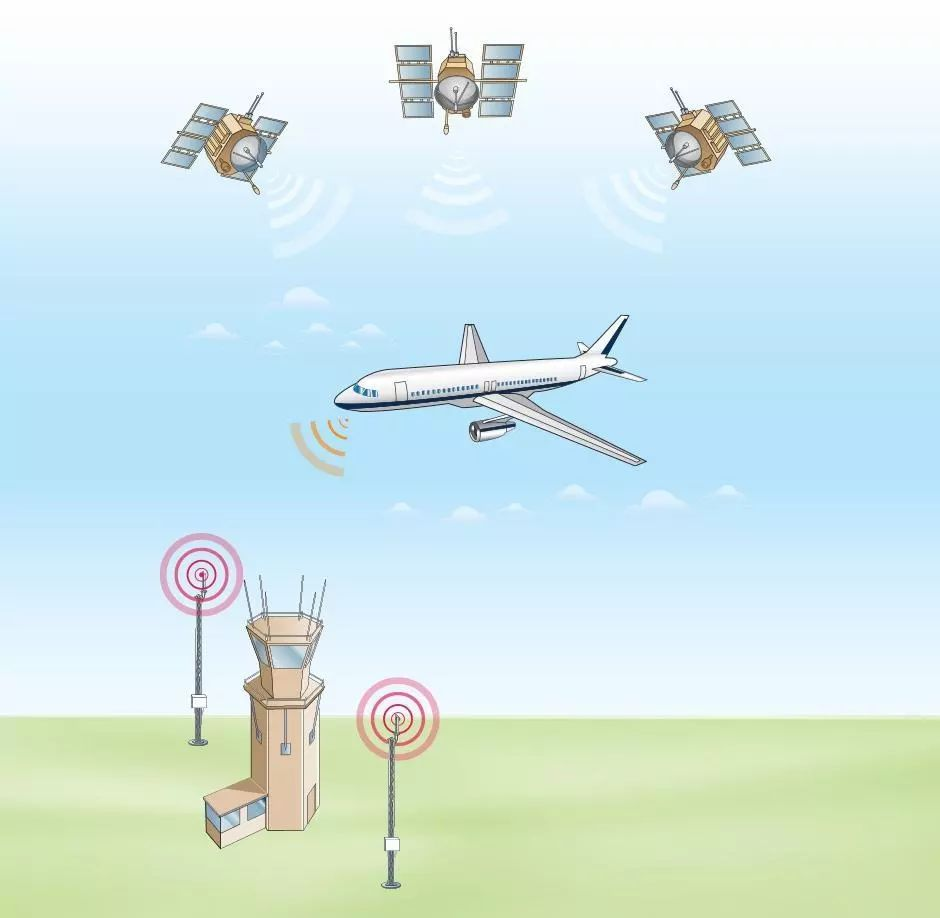
有关PBN运行相关知识及运行要求有哪些? 提问人:张哲源PBN全称“基于性能的导航”(Performance-Based Navigation),是国际民航组织在整合区域导航(RNAV)和所需导航性能(RNP)运行实践和技术标准的基础上,提出的一种新型运行概念。它将航空器的机载导航能力与卫星及其他先进技术结合起来,涵盖了从航路、终端区到进近着陆的所有飞行阶段,提供了更加精确、安全的飞行方法和更加高效的空中交通管理模式。PBN是指在相应的导航基础设施下,航空器在指定的空域内或者沿航路、仪表飞行程序飞行时,对于系统精确性、完好性、可用性、连续性以及功能等方面的性能要求。PBN的引入体现了航行方式从基于传感器到基于性能导航的转变。PBN运行的三个基础要素是导航应用、导航规范和支持系统运行的导航设施。导航设施导航设施从传统的地基导航设备如VOR、DME逐步向星基导航设备如GNSS的过渡中带来了一些列的航行新技术。目前,星基导航设施已开始成为PBN的主要导航设施,而星基导航设施的应用离不开各类型的增强系统。增强系统又可以分为以下几类:1星基增强系统SBAS(Satellite-Based Augmentation System)SBAS主要是利用差分卫星导航技术。即基准站(位置已知)接收GPS信号后,解算得到自身位置,将解算值与已知值进行比较,求出卫星定位误差,然后通过地球静止轨道卫星(GEO)向用户播发修正信息,实现对于原有卫星导航系统定位精度的改进。2地基增强系统GBAS(Ground Based Augmentation System)GBAS与SBAS原理相似,但却是通过甚高频数据广播(VDB)向终端区航空器播发修正信息,覆盖范围较小,大概在23海里的距离内,但精度很高,能够支持I类和II、III类精密进近,并实现在其工作范围内从进近、着陆、离场到场面运行的全覆盖。GBAS设备一般安装在机场附近。3机载增强系统ABAS(Airborne Based Augmentation System)ABAS利用GPS信息和其他传感器(如IRU等),通过一些列算法,实现机载导航系统的完好性监控。典型的ABAS主要包括接收机自主完好性监视RAIM(Receiver Autonomous Integrity Monitoring)和航空器自主完好性监视AAIM(Aircraft Autonomous Integrity Monitoring)。导航规范:导航规范是在确定的空域内对航空器和飞行机组提出的一系列要求,它定义了实施PBN所需的性能及具体功能要求,同时也确定了导航源和设备的选择方式PBN包含两类基本导航规范:区域导航(RNAV)和所需导航性能(RNP),其所有航路、程序导航设施的坐标数据必须基于WGS-84坐标系不同的飞行阶段应用不同的导航规范具体如上图注:在运行RNP10(RNAV10)时,B737、B757机型装有2套惯性导航系统/惯性基准系统(INS/IRS),可以在无任何外部导航信号源校准的情况下,在6.2小时的飞行时间内保持RNP-10能力。B787机型RNP-10导航能力没有时间限制。导航应用1.RNAV-1和RNAV-2一般用于有雷达监视和直接陆空通信联系的飞行,其中RNAV-1用于终端区(DP和STAR),RNAV-2用于航路飞行。RNAV-5一般用于航路飞行。RNP-10适用于海洋和偏远地区的航路飞行。RNP-10无机载性能监控和高精功能要求,概念等同于RNAV-10,这是源于RNP-10名称已经在国际上普遍使用。该导航规范不需要任何陆基导航设施,但需装有至少两套远程导航系统(IRS/FMS、INS或GPS)。2.RNP运行适用于航路、终端区和最后进近阶段,RNP程序需要使用具有机载性能监视和告警功能的RNAV系统。基本RNP-1用于终端区飞行,可用于进场航段,起始、中间进近和复飞航段,不能用于最后进近。RNP APCH用于最后进近,其复飞航段可以是基本RNP-1、RNAV或传统导航程序。RNP APCH的主要导航源为GNSS。RNP AR用于起始、中间、最后进近和复飞航段。3应用情况:4在向空中交通服务部门提供的飞行计划中应注明飞机和公司已经获得运行的批准。在ICAO飞行计划的编组10 (机载设备与能力)标注“R”,并在编组18 (其他情报)标注相应的区域导航规范以表明公司和所运行的飞机已获得相应PBN运行许可;PBN运行一般要求1.1 对于PBN运行所有的导航规范,其航路、飞行程序和导航设施的坐标数据必须基于WGS-84 坐标系。1.2 公司飞行人员、机务人员、飞行签派人员均应经过培训并合格于相应种类的PBN运行。1.3 实施PBN运行时,机载导航数据库应当前有效,并且满足手册相关要求。1.4 执行PBN运行的飞机必须具备相应的运行资格。飞机适航放行应按照相关机型的最低设备清单进行,对涉及PBN运行的设备故障应及时通报公司运行风险控制部。1.5 实施PBN运行时必须遵守公布AIP中的运行限制和要求。1.6 实施PBN运行时,飞行机组应按照各机型《飞机飞行手册》和《飞行组使用手册》规定的程序进行操作,以保证设备达到规定的性能要求。机场使用场压时,不得运行RNAV和RNP APCH程序;气压式高度表以场压为基准时,禁止使用水平导航方式或垂直导航方式。1.7实施PBN运行时,飞行机组应尽可能使用自动驾驶系统并接通水平导航模式,以保持在航路中心线飞行(空管授权偏离或紧急情况下实施偏离除外)。应使用导航地图显示或横向偏差指示器(如安装)监控偏航情况。飞行部一大队 汪月超
-
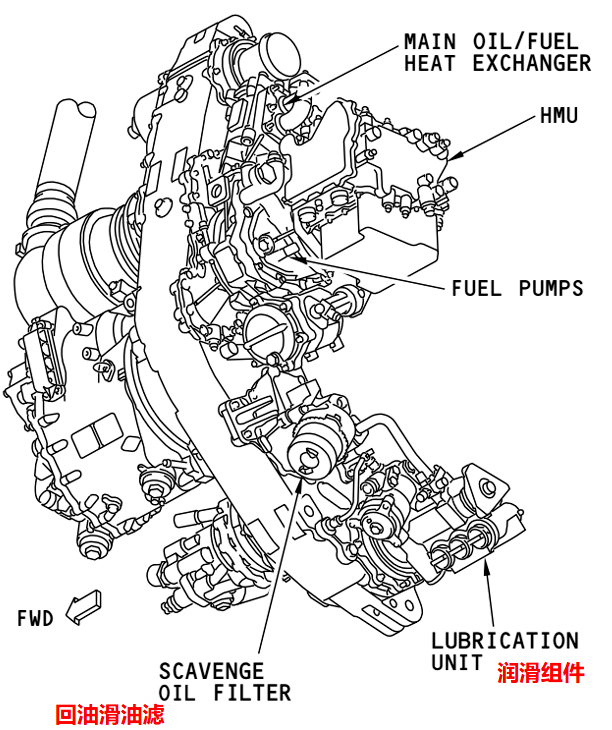
关于滑油系统的几个问题 关于滑油系统的几个问题提问人:王志航、王力扬1、滑油泵装在什么位置?滑油给哪些部件润滑?B737NG飞机装配的CFM56-7发动机的滑油系统主要部件安装在发动机附件齿轮箱上。如下图: 图1机械式滑油泵运转的直接动力是附件齿轮箱,N2转子要把动力传给附件齿轮箱又需要齿轮传动轴,N2、N1转子要正常转动又需要丝滑的轴承,而滑油被滑油泵抽吸出来送到发动机轴承、齿轮传动轴和附件齿轮箱提供润滑,降温、清洁、防腐、密封、减震等作用,然后回油泵(回油泵动力也是来自附件齿轮箱)再把使用过的滑油抽吸回来经过滤后输送回滑油箱。滑油泵和所需润滑部件的运作形成了相互依存,互帮互助的关系,像一个天然的“生态系统”。滑油系统部件如下图: 图2滑油通气系统连接滑油箱与前收油池。在发动机收油池和齿轮箱之间也有内部的气路连接,气路通过发动机尾部的排气锥体与外部相通。如下图: 图3在通气口有少量滑油是正常现象,如果滑油积聚过多有可能引起尾喷管起火。2、为什么关车后滑油温度和压力不可见,但滑油量可见?放行滑油油量的标准是什么?每一台发动机有2套滑油压力传感器和2套滑油温度传感器,这2套传感器由本侧发动机EEC的A、B两个通道分别供电,压力和温度显示在下DU,每一台发动机滑油量传感器只有1个,由2个DEU并联供电,所以发动机在地面关车后EEC没有电源,滑油压力、温度会消失,但滑油量有显示。目前航空发动机用的滑油是美孚合成II型航空滑油,1夸脱/罐,如图4 图41号发动机滑油加注口在发动机内侧,如图5 图52号发动机滑油加注口在发动机的外侧如图6 图6因为机翼上反角原因2号发动机滑油箱的最大容量比1号发动机滑油箱略大。滑油加油口内部是滑油箱和滑油量指示器如图7 图7 维护人员一般用螺丝刀对滑油罐开2个小孔进行倒注。如图8.1,8.2 图8.1 图8.2维护工卡要求飞机在外站过站期间要求滑油量不少于14夸脱(13.3升)或者70%,在公司基地过站不少于16夸脱(15.2升)或者80%。飞机航后工卡要求滑油量在18夸脱(17.1升)到20夸脱(19升)之间。第二天的航前可能会发现滑油量小于20夸脱,这是正常现象,因为前一天航后加滑油时滑油是高温状态,冷却后滑油量指示有一点减少。因为在运行中滑油会有很小的损耗,正常滑油消耗率低于0.4夸脱/飞行小时,一般为0.2夸脱/小时。滑油少量的滴漏从滑油量上不易发现,一般在地面需要详细检查才能发现漏点。如图9.1,图9.2 图9.1 图9.2如果滑油泄漏较快,滑油量降到0时,下DU发动机次要参数都会弹出,随后滑油压力会快速下降,当压力降到13PSI时就进入红区,发动机上DU的3个指示灯闪亮,闪亮过后滑油压力低( LOW OIL PRESSURE) 报警灯稳亮,很快上DU出现发动机失效( ENG FAIL) 报警。N2转子速度越大,附件齿轮箱效率越高,那么滑油泵的功率就越大,所以滑油泵功率与发动机转速是正相关的。当N2 低于 65% 时,滑油压力琥珀色区域不显示,N2高于 65% 时,滑油压力琥珀色区域根据 N2转速而有所变化。在发动机转速升高情况下,润滑需要更大的滑油压力,滑油低压区数值也会增大,形成“水涨船高”情况。3、检查单里滑油温度红线是155度,好像这个温度对于发动机系统来说并不算高,为什么最后要关车? 图10发动机工作期间滑油正常温度一般在八九十度左右,当滑油温度到达黄区或者红区时滑油黏度显著降低,摩擦系数增大,同时高温加速滑油氧化,生成酸性物质和沉淀物,进一步破坏润滑性能,形成恶性循环。滑油高温可能的原因是部件之间的剧烈摩擦或者滑油与燃油的热交换系统出了问题,不管什么原因,减小发动机转速,可以减少部件之间的摩擦和降低滑油流速,以期滑油温度降到正常范围。140℃是发动机连续操作的最高滑油温度限制,在140℃和155℃之间操作的时间限制为45分钟,在到达红线155℃时就需要关车。4、检查单里滑油滤旁通灯不熄灭最后要关车,不关车有什么风险? 图11润滑过的滑油被回油泵抽吸后经过一个滑油滤,送回滑油箱,如果回油杂质过多可能堵塞回油滤,在回油滤两端的压力传感器感应到较大压差时,EEC(电子发动机控制)将使上 DU 的滑油滤旁通(OIL FILTER BYPASS)报警灯亮。系统原理如下图12: 图12在执行滑油滤旁通(OIL FILTER BYPASS)QRH时要求缓慢收回油门杆直到慢车,发动机转速降下来后,滑油供油泵功率就会降低,单位时间内抽吸的滑油就会减少,如果回油滤是部分堵塞那么回油滤的上游端就会减轻“拥堵”压力,滑油不至于流经旁通活门,好比交通拥堵进行交通限流管制一样。旁通活门是一个弹簧加载的球形活门,如果滑油滤完全堵塞,压力超过旁通活门的限制,旁通活门打开,旁通活门管路上没有滤芯,那么杂质就会完全回到滑油箱,后面再次进入润滑部件只会加剧磨损,所以滑油滤旁通灯不熄灭只能关车了。在图2中,滑油的回油管路安装了MCD(Magnetic Chip Detector 磁性碎片探测器),MCD的作用就是分别搜集附件齿轮箱与传动轴、前轴承、后轴承3条回油管路碎片以方便维护人员定期检查,分析碎片成分确定磨损位置。MCD的检查维护可以预防滑油滤旁通情况的出现。特别提醒的是要区分滑油滤旁通灯亮和燃油滤旁通灯亮的情况,行业里曾经出现过将燃油滤旁通灯亮当成滑油滤旁通灯亮处置而造成空中错误关车的不安全事件。5、为什么QRH里没有滑油量低非正常检查单?滑油压力表征滑油供油泵工作性能,滑油温度表征部件内部摩擦或者冷却循环情况,滑油滤旁通表征滑油污染情况,模拟机上演示即使在滑油量较低(3--4夸脱)的情况下,滑油和发动机的各个参数也是正常的,在滑油量稳定在3个或者更少时下DU弹出滑油量低“LO”警告信息。当前公司航线运行中,发动机的各个参数都会被地面维护监控中心监控,滑油的慢泄漏很容易被提前发现,通过ACARS或者卫星电话告知机组提前作好备降,避免空中停车。所以当发动机的操作由滑油压力和滑油温度限制管理时,没有最低滑油量的限制,因此在QRH 中没有滑油量低非正常检查单。培训部飞行培训中心 王勇